ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳ ನಿಯಂತ್ರಣ
 ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳ ಹೊಂದಾಣಿಕೆಯನ್ನು ಈ ಕೆಳಗಿನ ವ್ಯಾಪ್ತಿಯಲ್ಲಿ ನಡೆಸಲಾಗುತ್ತದೆ:
ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳ ಹೊಂದಾಣಿಕೆಯನ್ನು ಈ ಕೆಳಗಿನ ವ್ಯಾಪ್ತಿಯಲ್ಲಿ ನಡೆಸಲಾಗುತ್ತದೆ:
• ದೃಶ್ಯ ತಪಾಸಣೆ;
• ಯಾಂತ್ರಿಕ ಭಾಗವನ್ನು ಪರಿಶೀಲಿಸುವುದು;
• ದೇಹಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಮತ್ತು ಸುರುಳಿಗಳ ನಡುವೆ ಸುರುಳಿಗಳ ನಿರೋಧನ ಪ್ರತಿರೋಧದ ಮಾಪನ;
• ನೇರ ಪ್ರವಾಹಕ್ಕೆ ವಿಂಡ್ಗಳ ಪ್ರತಿರೋಧವನ್ನು ಅಳೆಯುವುದು;
• ಕೈಗಾರಿಕಾ ಆವರ್ತನದಲ್ಲಿ ಹೆಚ್ಚಿದ ವೋಲ್ಟೇಜ್ನೊಂದಿಗೆ ಸುರುಳಿಗಳ ಪರೀಕ್ಷೆ;
• ಪ್ರಾಯೋಗಿಕ ರನ್.
ನಿಯಂತ್ರಣ ಫಲಕದಿಂದ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ ಪ್ರಾರಂಭದ ಬಾಹ್ಯ ತಪಾಸಣೆ.
ಪ್ಲೇಟ್ ಈ ಕೆಳಗಿನ ಮಾಹಿತಿಯನ್ನು ಒಳಗೊಂಡಿರಬೇಕು:
• ತಯಾರಕರ ಹೆಸರು ಅಥವಾ ಟ್ರೇಡ್ಮಾರ್ಕ್,
• ಪ್ರಕಾರ ಮತ್ತು ಸರಣಿ ಸಂಖ್ಯೆ,
• ನಾಮಮಾತ್ರ ಡೇಟಾ (ವಿದ್ಯುತ್, ವೋಲ್ಟೇಜ್, ಪ್ರಸ್ತುತ, ವೇಗ, ಸುರುಳಿ ಸಂಪರ್ಕ ರೇಖಾಚಿತ್ರ, ದಕ್ಷತೆ, ವಿದ್ಯುತ್ ಅಂಶ),
• ನೀಡಿದ ವರ್ಷ,
• ತೂಕ ಮತ್ತು ಎಂಜಿನ್ಗಾಗಿ GOST.
ಎಂಜಿನ್ ಶೀಲ್ಡ್ ಅನ್ನು ತಿಳಿದುಕೊಳ್ಳುವುದು ಕೆಲಸದ ಆರಂಭದಲ್ಲಿ ಅಗತ್ಯವಿದೆ. ನಂತರ ಅವರು ಎಂಜಿನ್ನ ಹೊರ ಮೇಲ್ಮೈ ಸ್ಥಿತಿಯನ್ನು ಪರಿಶೀಲಿಸುತ್ತಾರೆ, ಅದರ ಬೇರಿಂಗ್ ಅಸೆಂಬ್ಲಿಗಳು, ಶಾಫ್ಟ್ನ ಔಟ್ಪುಟ್ ಅಂತ್ಯ, ಫ್ಯಾನ್ ಮತ್ತು ಟರ್ಮಿನಲ್ ಟರ್ಮಿನಲ್ಗಳ ಸ್ಥಿತಿಯನ್ನು ಪರಿಶೀಲಿಸುತ್ತಾರೆ.
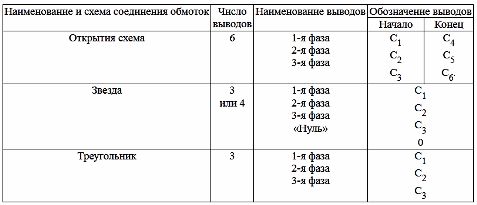
ಮೂರು-ಹಂತದ ಮೋಟಾರು ಸಂಯೋಜಿತ ಮತ್ತು ವಿಭಾಗದ ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳನ್ನು ಹೊಂದಿಲ್ಲದಿದ್ದರೆ, ನಂತರ ಟರ್ಮಿನಲ್ಗಳನ್ನು ಟೇಬಲ್ಗೆ ಅನುಗುಣವಾಗಿ ಗೊತ್ತುಪಡಿಸಲಾಗುತ್ತದೆ.1, ಮತ್ತು ಅಂತಹ ಸುರುಳಿಗಳ ಉಪಸ್ಥಿತಿಯಲ್ಲಿ, ಟರ್ಮಿನಲ್ಗಳನ್ನು ಸಾಮಾನ್ಯ ಸುರುಳಿಗಳಂತೆಯೇ ಅದೇ ಅಕ್ಷರಗಳೊಂದಿಗೆ ಗೊತ್ತುಪಡಿಸಲಾಗುತ್ತದೆ, ಆದರೆ ದೊಡ್ಡ ಅಕ್ಷರಗಳ ಮುಂದೆ ಹೆಚ್ಚುವರಿ ಸಂಖ್ಯೆಗಳೊಂದಿಗೆ. ಫಾರ್ ಬಹು-ವೇಗದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು ಅಕ್ಷರಗಳ ಮೊದಲು ಆ ವಿಭಾಗದಲ್ಲಿನ ಧ್ರುವಗಳ ಸಂಖ್ಯೆಯನ್ನು ಸೂಚಿಸುವ ಸಂಖ್ಯೆಗಳಾಗಿವೆ.
ಕೋಷ್ಟಕ 1
ಕೋಷ್ಟಕ 2

ಗಮನಿಸಿ: ಟರ್ಮಿನಲ್ಗಳು ಸಂಖ್ಯೆಯ ಪಿ - ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಗೊಂಡಿದೆ, ಸಿ - ಉಚಿತ, Z - ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್
ಬಹು-ವೇಗದ ಮೋಟಾರ್ಗಳ ಗುರಾಣಿಗಳ ಗುರುತು ಮತ್ತು ವಿವಿಧ ವೇಗಗಳಲ್ಲಿ ಅವುಗಳನ್ನು ಸ್ವಿಚ್ ಮಾಡುವ ವಿಧಾನಗಳನ್ನು ಟೇಬಲ್ನ ಸಹಾಯದಿಂದ ವಿವರಿಸಬಹುದು. 2.
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ ಅನ್ನು ಪರಿಶೀಲಿಸುವಾಗ, ಟರ್ಮಿನಲ್ ಬಾಕ್ಸ್ ಮತ್ತು ಔಟ್ಪುಟ್ ತುದಿಗಳ ಸ್ಥಿತಿಗೆ ವಿಶೇಷ ಗಮನ ನೀಡಬೇಕು, ಅಲ್ಲಿ ವಿವಿಧ ನಿರೋಧನ ದೋಷಗಳು ತುಂಬಾ ಸಾಮಾನ್ಯವಾಗಿದೆ, ಲೈವ್ ಭಾಗಗಳು ಮತ್ತು ವಸತಿ ನಡುವಿನ ಅಂತರವನ್ನು ಅಳೆಯುತ್ತದೆ. ಮೇಲ್ಮೈ ಅತಿಕ್ರಮಿಸದಂತೆ ಅದು ಸಾಕಷ್ಟು ದೊಡ್ಡದಾಗಿರಬೇಕು. ಅಕ್ಷೀಯ ದಿಕ್ಕಿನಲ್ಲಿ ಶಾಫ್ಟ್ ರನ್ಔಟ್ನ ಮೌಲ್ಯವು ಸಮಾನವಾಗಿ ಮುಖ್ಯವಾಗಿದೆ, ಇದು ಮಾನದಂಡಗಳ ಪ್ರಕಾರ, 40 kW ವರೆಗಿನ ಶಕ್ತಿಯೊಂದಿಗೆ ಮೋಟಾರ್ಗಳಿಗಾಗಿ 2 mm (ಒಂದು ದಿಕ್ಕಿನಲ್ಲಿ 1 ಮಿಮೀ) ಮೀರಬಾರದು.
ಗಾಳಿಯ ಅಂತರದ ಗಾತ್ರವು ಹೆಚ್ಚಿನ ಪ್ರಾಮುಖ್ಯತೆಯನ್ನು ಹೊಂದಿದೆ, ಏಕೆಂದರೆ ಇದು ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳ ಗುಣಲಕ್ಷಣಗಳ ಮೇಲೆ ಗಮನಾರ್ಹ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ, ಆದ್ದರಿಂದ, ದುರಸ್ತಿ ಮಾಡಿದ ನಂತರ ಅಥವಾ ಮೋಟರ್ನ ಅತೃಪ್ತಿಕರ ಕಾರ್ಯಾಚರಣೆಯ ಸಂದರ್ಭದಲ್ಲಿ, ಗಾಳಿಯ ಅಂತರವನ್ನು ನಾಲ್ಕು ವಿಭಿನ್ನ ಬಿಂದುಗಳಲ್ಲಿ ಅಳೆಯಲಾಗುತ್ತದೆ. ಕ್ಲಿಯರೆನ್ಸ್ಗಳು ಸಂಪೂರ್ಣ ಸುತ್ತಳತೆಯ ಮೇಲೆ ಏಕರೂಪವಾಗಿರಬೇಕು ಮತ್ತು ಸರಾಸರಿ ಮೌಲ್ಯದ 10% ಕ್ಕಿಂತ ಹೆಚ್ಚು ಈ ನಾಲ್ಕು ಬಿಂದುಗಳಲ್ಲಿ ಯಾವುದೇ ವ್ಯತ್ಯಾಸವನ್ನು ಹೊಂದಿರಬಾರದು.
ಥ್ರೆಡ್ ಮತ್ತು ಗೇರ್ ಗ್ರೈಂಡರ್ಗಳಂತಹ ವಿವಿಧ ಯಂತ್ರೋಪಕರಣಗಳಲ್ಲಿನ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು ವಿಶೇಷ ಸೋರಿಕೆ ಮತ್ತು ಕಂಪನ ಅಗತ್ಯತೆಗಳನ್ನು ಹೊಂದಿವೆ.ವಿದ್ಯುತ್ ಯಂತ್ರಗಳ ಶಾಫ್ಟ್ ರನ್ಔಟ್ ಮತ್ತು ಕಂಪನವು ಯಂತ್ರದ ತಿರುಗುವ ಭಾಗಗಳ ಯಂತ್ರ ನಿಖರತೆ ಮತ್ತು ಸ್ಥಿತಿಯಿಂದ ಹೆಚ್ಚು ಪರಿಣಾಮ ಬೀರುತ್ತದೆ. ಮೋಟಾರ್ ಶಾಫ್ಟ್ ಬಾಗಿದ್ದಾಗ ಆಘಾತಗಳು ಮತ್ತು ಕಂಪನಗಳು ವಿಶೇಷವಾಗಿ ಹೆಚ್ಚಿರುತ್ತವೆ.
ರನ್ಔಟ್ - ತಿರುಗುವ ದೇಹಗಳಂತಹ ತಿರುಗುವ ಅಥವಾ ಆಂದೋಲನದ ಭಾಗಗಳ ಮೇಲ್ಮೈಗಳ ನಿರ್ದಿಷ್ಟ (ಸರಿಯಾದ) ಸಂಬಂಧಿತ ಸ್ಥಾನದಿಂದ ವಿಚಲನ. ರೇಡಿಯಲ್ ಮತ್ತು ಎಂಡ್ ಸ್ಟ್ರೋಕ್ಗಳ ನಡುವೆ ವ್ಯತ್ಯಾಸವನ್ನು ಗುರುತಿಸಿ.
ಎಲ್ಲಾ ಯಂತ್ರಗಳಿಗೆ, ಸೋರಿಕೆಯು ಅನಪೇಕ್ಷಿತವಾಗಿದೆ, ಏಕೆಂದರೆ ಇದು ಬೇರಿಂಗ್ ಅಸೆಂಬ್ಲಿಗಳ ಸಾಮಾನ್ಯ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಮತ್ತು ಒಟ್ಟಾರೆಯಾಗಿ ಯಂತ್ರವನ್ನು ಅಡ್ಡಿಪಡಿಸುತ್ತದೆ. ಸೋರಿಕೆಯನ್ನು ಅಳೆಯಲಾಗುತ್ತದೆ 0.01mm ನಿಂದ 10mm ವರೆಗಿನ ಸ್ಟ್ರೋಕ್ಗಳನ್ನು ಅಳೆಯುವ ಡಯಲ್ನೊಂದಿಗೆ. ಶಾಫ್ಟ್ ರನ್ಔಟ್ ಅನ್ನು ಅಳೆಯುವಾಗ, ಸೂಚಕದ ತುದಿ ಶಾಫ್ಟ್ ಮೇಲೆ ನಿಂತಿದೆ, ಅದು ಕಡಿಮೆ ವೇಗದಲ್ಲಿ ತಿರುಗುತ್ತದೆ, ಗಂಟೆ ಸೂಚಕ ಕೈಯ ವಿಚಲನವು ರನೌಟ್ನ ಮೌಲ್ಯವನ್ನು ಅಂದಾಜು ಮಾಡುತ್ತದೆ, ಇದು ತಾಂತ್ರಿಕ ವಿಶೇಷಣಗಳಲ್ಲಿ ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ಮೌಲ್ಯಗಳನ್ನು ಮೀರಬಾರದು ಯಂತ್ರ ಅಥವಾ ಎಂಜಿನ್.
ವಿದ್ಯುತ್ ಯಂತ್ರಗಳ ನಿರೋಧನವು ಒಂದು ಪ್ರಮುಖ ಸೂಚಕವಾಗಿದೆ, ಏಕೆಂದರೆ ಯಂತ್ರದ ಬಾಳಿಕೆ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆಯು ಅದರ ಸ್ಥಿತಿಯನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ. GOST ಪ್ರಕಾರ, ವಿದ್ಯುತ್ ಯಂತ್ರಗಳ MΩ ನಲ್ಲಿ ವಿಂಡ್ಗಳ ನಿರೋಧನ ಪ್ರತಿರೋಧವು ಕನಿಷ್ಠವಾಗಿರಬೇಕು
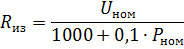
ಅಲ್ಲಿ ಅನ್ - ನಾಮಮಾತ್ರದ ಅಂಕುಡೊಂಕಾದ ವೋಲ್ಟೇಜ್, ವಿ; Pn - ಯಂತ್ರದ ನಾಮಮಾತ್ರದ ಶಕ್ತಿ, kW.
ಇಂಜಿನ್ನ ಪರೀಕ್ಷಾ ಪ್ರಾರಂಭದ ಮೊದಲು ನಿರೋಧನ ಪ್ರತಿರೋಧವನ್ನು ಅಳೆಯಲಾಗುತ್ತದೆ, ಮತ್ತು ನಂತರ ನಿಯತಕಾಲಿಕವಾಗಿ ಕಾರ್ಯಾಚರಣೆಯ ಸಮಯದಲ್ಲಿ; ಹೆಚ್ಚುವರಿಯಾಗಿ, ಕಾರ್ಯಾಚರಣೆಯಲ್ಲಿ ದೀರ್ಘ ಅಡಚಣೆಗಳ ನಂತರ ಮತ್ತು ಡ್ರೈವ್ನ ಯಾವುದೇ ತುರ್ತು ಸ್ಥಗಿತದ ನಂತರ ಅವುಗಳನ್ನು ಗಮನಿಸಲಾಗುತ್ತದೆ.

ಪ್ರತಿ ಹಂತದ ಪ್ರಾರಂಭ ಮತ್ತು ಅಂತ್ಯವನ್ನು ಮೋಟರ್ನಲ್ಲಿ ಪತ್ತೆ ಮಾಡಿದರೆ, ಪ್ರತಿ ಹಂತಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಮತ್ತು ವಿಂಡ್ಗಳ ನಡುವೆ ನಿರೋಧನ ಪ್ರತಿರೋಧವನ್ನು ಪ್ರತ್ಯೇಕವಾಗಿ ಅಳೆಯಲಾಗುತ್ತದೆ. ಬಹು-ವೇಗದ ಮೋಟಾರ್ಗಳಲ್ಲಿ, ಪ್ರತಿ ಅಂಕುಡೊಂಕಾದ ನಿರೋಧನ ಪ್ರತಿರೋಧವನ್ನು ಪ್ರತ್ಯೇಕವಾಗಿ ಪರಿಶೀಲಿಸಲಾಗುತ್ತದೆ.
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ಗಳ ನಿರೋಧನ ಪ್ರತಿರೋಧವನ್ನು ಅಳೆಯಲು 1000 V ವರೆಗಿನ ವೋಲ್ಟೇಜ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ ಮೆಗಾಮೀಟರ್ಗಳು 500 ಮತ್ತು 1000 ವಿ.
ಕೆಳಗಿನಂತೆ ಮಾಪನವನ್ನು ಕೈಗೊಳ್ಳಲಾಗುತ್ತದೆ, ಮೆಗಾಹ್ಮೀಟರ್ «ಸ್ಕ್ರೀನ್» ಗಾಗಿ ಕ್ಲಾಂಪ್ ಯಂತ್ರದ ದೇಹಕ್ಕೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, ಮತ್ತು ಎರಡನೇ ಕ್ಲಾಂಪ್ ವಿಶ್ವಾಸಾರ್ಹ ನಿರೋಧನದೊಂದಿಗೆ ಹೊಂದಿಕೊಳ್ಳುವ ತಂತಿಯೊಂದಿಗೆ ಸುರುಳಿಯ ಟರ್ಮಿನಲ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ವಿಶ್ವಾಸಾರ್ಹ ಸಂಪರ್ಕವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ತಂತಿಗಳ ತುದಿಗಳನ್ನು ಮೊನಚಾದ ಲೋಹದ ಪಿನ್ನೊಂದಿಗೆ ಇನ್ಸುಲೇಟಿಂಗ್ ವಸ್ತುಗಳ ಹಿಡಿಕೆಗಳಿಂದ ಮುಚ್ಚಬೇಕು.
ಮೆಗ್ಗರ್ ಹ್ಯಾಂಡಲ್ ಸುಮಾರು 2 ಆರ್ಪಿಎಸ್ ಆವರ್ತನದಲ್ಲಿ ತಿರುಗುತ್ತದೆ. ಸಣ್ಣ ಮೋಟಾರ್ಗಳು ಸಣ್ಣ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿವೆ, ಆದ್ದರಿಂದ ಸಾಧನದ ಸೂಜಿಯನ್ನು ಯಂತ್ರದ ವಿಂಡಿಂಗ್ನ ನಿರೋಧನ ಪ್ರತಿರೋಧಕ್ಕೆ ಅನುಗುಣವಾದ ಸ್ಥಾನಕ್ಕೆ ಹೊಂದಿಸಲಾಗಿದೆ.
ಹೊಸ ಯಂತ್ರಗಳಿಗೆ, ಅಭ್ಯಾಸದ ಪ್ರದರ್ಶನದಂತೆ ನಿರೋಧನ ಪ್ರತಿರೋಧವು 5 ರಿಂದ 100 ಮೆಗಾಮ್ಗಳ ವ್ಯಾಪ್ತಿಯಲ್ಲಿ 20 ° C ತಾಪಮಾನದಲ್ಲಿ ಏರಿಳಿತಗೊಳ್ಳುತ್ತದೆ. ಕಡಿಮೆ ಶಕ್ತಿ ಮತ್ತು ವೋಲ್ಟೇಜ್ 1000 V ವರೆಗೆ ಕಡಿಮೆ-ನಿರ್ಣಾಯಕ ಡ್ರೈವ್ಗಳನ್ನು ಹೊಂದಿರುವ ಮೋಟಾರ್ಗಳಿಗೆ "ವಿದ್ಯುತ್ ಅನುಸ್ಥಾಪನೆಗೆ ನಿಯಮಗಳು" R ನ ಮೌಲ್ಯದ ಮೇಲೆ ನಿರ್ದಿಷ್ಟ ಅವಶ್ಯಕತೆಗಳನ್ನು ವಿಧಿಸಬೇಡಿ.ಅಭ್ಯಾಸದಿಂದ, 0.5 ಮೆಗಾಮ್ಗಿಂತ ಕಡಿಮೆ ಪ್ರತಿರೋಧವನ್ನು ಹೊಂದಿರುವ ಮೋಟಾರ್ಗಳನ್ನು ಕಾರ್ಯಾಚರಣೆಗೆ ಒಳಪಡಿಸಿದಾಗ, ಅವುಗಳ ನಿರೋಧನ ಪ್ರತಿರೋಧವು ಹೆಚ್ಚಾಗುತ್ತದೆ ಮತ್ತು ನಂತರ ಅವು ಸಮಸ್ಯೆಗಳಿಲ್ಲದೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ.
ಕಾರ್ಯಾಚರಣೆಯ ಸಮಯದಲ್ಲಿ ನಿರೋಧನ ಪ್ರತಿರೋಧದಲ್ಲಿನ ಇಳಿಕೆಯು ಮೇಲ್ಮೈ ತೇವಾಂಶ, ವಾಹಕ ಧೂಳಿನೊಂದಿಗೆ ನಿರೋಧನ ಮೇಲ್ಮೈಯ ಮಾಲಿನ್ಯ, ನಿರೋಧನಕ್ಕೆ ತೇವಾಂಶದ ನುಗ್ಗುವಿಕೆ ಮತ್ತು ನಿರೋಧನದ ರಾಸಾಯನಿಕ ವಿಭಜನೆಯಿಂದ ಉಂಟಾಗುತ್ತದೆ. ನಿರೋಧನ ಪ್ರತಿರೋಧದಲ್ಲಿನ ಇಳಿಕೆಗೆ ಕಾರಣಗಳನ್ನು ಸ್ಪಷ್ಟಪಡಿಸಲು, ನಿಯಂತ್ರಿತ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಎರಡು ಪ್ರಸ್ತುತ ನಿರ್ದೇಶನಗಳೊಂದಿಗೆ, ಉದಾಹರಣೆಗೆ R-316 ಅನ್ನು ಡಬಲ್ ಸೇತುವೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಅಳೆಯಲು ಅವಶ್ಯಕ. ವಿಭಿನ್ನ ಮಾಪನ ಫಲಿತಾಂಶಗಳೊಂದಿಗೆ, ನಿರೋಧನದ ದಪ್ಪಕ್ಕೆ ತೇವಾಂಶದ ನುಗ್ಗುವಿಕೆ ಹೆಚ್ಚಾಗಿ ಕಾರಣವಾಗಿದೆ.
ನಿರ್ದಿಷ್ಟವಾಗಿ ಹೇಳುವುದಾದರೆ, ಹೆಚ್ಚಿದ ವೋಲ್ಟೇಜ್ನೊಂದಿಗೆ ವಿಂಡ್ಗಳನ್ನು ಪರೀಕ್ಷಿಸಿದ ನಂತರ ಮಾತ್ರ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ ಅನ್ನು ನಿಯೋಜಿಸುವ ಪ್ರಶ್ನೆಯನ್ನು ನಿರ್ಧರಿಸಬೇಕು. ಮಿತಿಮೀರಿದ ಪರೀಕ್ಷೆಯಿಲ್ಲದೆ ಕಡಿಮೆ ಮೌಲ್ಯದ ನಿರೋಧನ ಪ್ರತಿರೋಧವನ್ನು ಹೊಂದಿರುವ ಮೋಟರ್ ಅನ್ನು ಅಸಾಧಾರಣ ಸಂದರ್ಭಗಳಲ್ಲಿ ಮಾತ್ರ ಅನುಮತಿಸಲಾಗುತ್ತದೆ, ಯಾವುದು ಹೆಚ್ಚು ಲಾಭದಾಯಕ ಎಂಬ ಪ್ರಶ್ನೆಯನ್ನು ನಿರ್ಧರಿಸಿದಾಗ: ಮೋಟರ್ ಅನ್ನು ಅಪಾಯಕ್ಕೆ ತರಲು ಅಥವಾ ದುಬಾರಿ ಉಪಕರಣಗಳ ಅಲಭ್ಯತೆಯನ್ನು ಅನುಮತಿಸಲು.
ಮೋಟಾರಿನ ಕಾರ್ಯಾಚರಣೆಯ ಸಮಯದಲ್ಲಿ, ನಿರೋಧನಕ್ಕೆ ಹಾನಿ, ಅನುಮತಿಸುವ ಮಾನದಂಡಗಳ ಕೆಳಗೆ ಅದರ ಡೈಎಲೆಕ್ಟ್ರಿಕ್ ಬಲದಲ್ಲಿ ಇಳಿಕೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ ... GOST ಪ್ರಕಾರ, ಪ್ರಕರಣಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಮತ್ತು ನಡುವೆ ವಿಂಡ್ಗಳ ನಿರೋಧನದ ಡೈಎಲೆಕ್ಟ್ರಿಕ್ ಸಾಮರ್ಥ್ಯದ ಪರೀಕ್ಷೆ ಪರೀಕ್ಷಾ ವೋಲ್ಟೇಜ್ನೊಂದಿಗೆ 1 ನಿಮಿಷಕ್ಕೆ ನೆಟ್ವರ್ಕ್ನಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಂಡ ಮೋಟರ್ನೊಂದಿಗೆ ಅವುಗಳನ್ನು ಕೈಗೊಳ್ಳಲಾಗುತ್ತದೆ, ಅದರ ಮೌಲ್ಯವು ಕೋಷ್ಟಕದಲ್ಲಿ ನೀಡಲಾದ ಮೌಲ್ಯಕ್ಕಿಂತ ಕಡಿಮೆಯಿರಬಾರದು. 3.
ಕೋಷ್ಟಕ 3
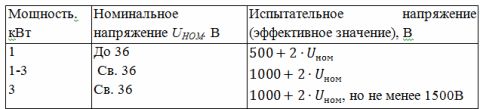
ಹೆಚ್ಚಿದ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಹಂತಗಳಲ್ಲಿ ಒಂದಕ್ಕೆ ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಉಳಿದ ಹಂತಗಳನ್ನು ಮೋಟಾರ್ ಕೇಸಿಂಗ್ಗೆ ಸಂಪರ್ಕಿಸಲಾಗುತ್ತದೆ, ವಿಂಡ್ಗಳನ್ನು ಸ್ಟಾರ್ ಅಥವಾ ಡೆಲ್ಟಾದಲ್ಲಿ ಮೋಟಾರ್ನೊಳಗೆ ಸಂಪರ್ಕಿಸಿದರೆ, ಅಂಕುಡೊಂಕಾದ ಮತ್ತು ಚೌಕಟ್ಟಿನ ನಡುವಿನ ನಿರೋಧನ ಪರೀಕ್ಷೆಯನ್ನು ಏಕಕಾಲದಲ್ಲಿ ನಡೆಸಲಾಗುತ್ತದೆ. ಸಂಪೂರ್ಣ ಅಂಕುಡೊಂಕಾದ. ಪರೀಕ್ಷೆಯ ಸಮಯದಲ್ಲಿ ವೋಲ್ಟೇಜ್ ಅನ್ನು ತಕ್ಷಣವೇ ಅನ್ವಯಿಸಲಾಗುವುದಿಲ್ಲ. ಪರೀಕ್ಷೆಯು ಪರೀಕ್ಷಾ ವೋಲ್ಟೇಜ್ನ 1/3 ನೊಂದಿಗೆ ಪ್ರಾರಂಭವಾಗುತ್ತದೆ, ನಂತರ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಪರೀಕ್ಷಾ ವೋಲ್ಟೇಜ್ಗೆ ಕ್ರಮೇಣ ಹೆಚ್ಚಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಅರ್ಧದಿಂದ ಪೂರ್ಣ ಪರೀಕ್ಷಾ ವೋಲ್ಟೇಜ್ಗೆ ಏರುವ ಸಮಯವು ಕನಿಷ್ಟ 10 ಸೆ.
ಪೂರ್ಣ ವೋಲ್ಟೇಜ್ ಅನ್ನು 1 ನಿಮಿಷಕ್ಕೆ ನಿರ್ವಹಿಸಲಾಗುತ್ತದೆ, ನಂತರ ಕ್ರಮೇಣ 1 / 3Utest ಗೆ ಕಡಿಮೆಯಾಗುತ್ತದೆ ಮತ್ತು ಪರೀಕ್ಷಾ ಸೆಟ್ಟಿಂಗ್ ಅನ್ನು ಆಫ್ ಮಾಡಲಾಗಿದೆ. ಪರೀಕ್ಷೆಯ ಸಮಯದಲ್ಲಿ ನಿರೋಧನದ ಯಾವುದೇ ಸ್ಥಗಿತ ಅಥವಾ ನಿರೋಧನದ ಮೇಲ್ಮೈಯಲ್ಲಿ ಅತಿಕ್ರಮಿಸದಿದ್ದರೆ ಪರೀಕ್ಷಾ ಫಲಿತಾಂಶಗಳನ್ನು ತೃಪ್ತಿಕರವೆಂದು ಪರಿಗಣಿಸಲಾಗುತ್ತದೆ, ಆದರೆ ಉಪಕರಣಗಳ ಮೇಲೆ ಯಾವುದೇ ತೀಕ್ಷ್ಣವಾದ ಆಘಾತಗಳನ್ನು ಗಮನಿಸಲಾಗಿಲ್ಲ, ಇದು ನಿರೋಧನಕ್ಕೆ ಭಾಗಶಃ ಹಾನಿಯನ್ನು ಸೂಚಿಸುತ್ತದೆ.
ಪರೀಕ್ಷೆಯ ಸಮಯದಲ್ಲಿ ದೋಷ ಸಂಭವಿಸಿದಲ್ಲಿ, ಅದರೊಂದಿಗೆ ಒಂದು ಸ್ಥಳವನ್ನು ಕಂಡುಹಿಡಿಯಲಾಗುತ್ತದೆ ಮತ್ತು ಸುರುಳಿಯನ್ನು ಸರಿಪಡಿಸಲಾಗುತ್ತದೆ. ದೋಷದ ಸ್ಥಳವನ್ನು ವೋಲ್ಟೇಜ್ ಅನ್ನು ಮರು-ಅಳವಡಿಕೆ ಮಾಡುವ ಮೂಲಕ ನಿರ್ಧರಿಸಬಹುದು ಮತ್ತು ನಂತರ ಸ್ಪಾರ್ಕ್ಗಳು, ಹೊಗೆ ಅಥವಾ ಸ್ವಲ್ಪ ಪಾಪ್ಗಳು ಬಾಹ್ಯವಾಗಿ ಗೋಚರಿಸದಿದ್ದಾಗ ವೀಕ್ಷಿಸಬಹುದು.
ಸರ್ಕ್ಯೂಟ್ ಅಂಶಗಳ ತಾಂತ್ರಿಕ ಡೇಟಾವನ್ನು ಸ್ಪಷ್ಟಪಡಿಸಲು ಕೈಗೊಳ್ಳಲಾಗುವ ವಿಂಡ್ಗಳ ಪ್ರತಿರೋಧದ ಡಿಸಿ ಮಾಪನ, ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ನ ಉಪಸ್ಥಿತಿಯನ್ನು ನಿರ್ಧರಿಸಲು ಕೆಲವು ಸಂದರ್ಭಗಳಲ್ಲಿ ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಮಾಪನದ ಸಮಯದಲ್ಲಿ ವಿಂಡ್ಗಳ ತಾಪಮಾನವು ಸುತ್ತುವರಿದಕ್ಕಿಂತ 5 ° C ಗಿಂತ ಹೆಚ್ಚು ಭಿನ್ನವಾಗಿರಬಾರದು.
ಮಾಪನಗಳನ್ನು ಒಂದೇ ಅಥವಾ ಎರಡು ಸೇತುವೆಯನ್ನು ಬಳಸಿ, ಆಮ್ಮೀಟರ್-ವೋಲ್ಟ್ಮೀಟರ್ ವಿಧಾನದಿಂದ ಅಥವಾ ಮೈಕ್ರೋಓಮ್ಮೀಟರ್ ವಿಧಾನದಿಂದ ಮಾಡಲಾಗುತ್ತದೆ.ಪ್ರತಿರೋಧ ಮೌಲ್ಯಗಳು ಸರಾಸರಿಗಿಂತ 20% ಕ್ಕಿಂತ ಹೆಚ್ಚು ಭಿನ್ನವಾಗಿರಬಾರದು.
GOST ಪ್ರಕಾರ, ವಿಂಡ್ಗಳ ಪ್ರತಿರೋಧವನ್ನು ಅಳೆಯುವಾಗ, ಪ್ರತಿ ಪ್ರತಿರೋಧವನ್ನು 3 ಬಾರಿ ಅಳೆಯಬೇಕು. ಆಮ್ಮೀಟರ್-ವೋಲ್ಟ್ಮೀಟರ್ ವಿಧಾನದಿಂದ ಸುರುಳಿಯ ಪ್ರತಿರೋಧವನ್ನು ಅಳೆಯುವಾಗ, ಪ್ರತಿ ಪ್ರತಿರೋಧವನ್ನು ಮೂರು ವಿಭಿನ್ನ ಪ್ರಸ್ತುತ ಮೌಲ್ಯಗಳಲ್ಲಿ ಅಳೆಯಬೇಕು. ಮೂರು ಅಳತೆಗಳ ಅಂಕಗಣಿತದ ಸರಾಸರಿ ಮೌಲ್ಯವನ್ನು ನಿಜವಾದ ಪ್ರತಿರೋಧ ಮೌಲ್ಯವಾಗಿ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ.
ಹೆಚ್ಚಿನ ಮಾಪನ ನಿಖರತೆ ಅಗತ್ಯವಿಲ್ಲದ ಸಂದರ್ಭಗಳಲ್ಲಿ ಅಮ್ಮೀಟರ್-ವೋಲ್ಟ್ಮೀಟರ್ ವಿಧಾನ (Fig. 1) ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಆಮ್ಮೀಟರ್-ವೋಲ್ಟ್ಮೀಟರ್ ವಿಧಾನದಿಂದ ಮಾಪನವು ಓಮ್ನ ನಿಯಮವನ್ನು ಆಧರಿಸಿದೆ:
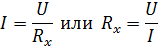
ಅಲ್ಲಿ Rx - ಅಳತೆ ಪ್ರತಿರೋಧ, ಓಮ್; U- ವೋಲ್ಟ್ಮೀಟರ್ ಓದುವಿಕೆ, ವಿ; ನಾನು ಓದುವಿಕೆ ಅಮ್ಮೆಟರ್, ಎ.
ಈ ವಿಧಾನದೊಂದಿಗೆ ಮಾಪನದ ನಿಖರತೆಯನ್ನು ಉಪಕರಣಗಳ ಒಟ್ಟು ದೋಷದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಆದ್ದರಿಂದ ಆಮ್ಮೀಟರ್ನ ನಿಖರತೆಯ ವರ್ಗವು 0.5% ಆಗಿದ್ದರೆ ಮತ್ತು ವೋಲ್ಟ್ಮೀಟರ್ನದು 1% ಆಗಿದ್ದರೆ, ಒಟ್ಟು ದೋಷವು 1.5% ಆಗಿರುತ್ತದೆ.
ಅಮ್ಮೀಟರ್-ವೋಲ್ಟ್ಮೀಟರ್ ವಿಧಾನವು ಹೆಚ್ಚು ನಿಖರವಾದ ಫಲಿತಾಂಶಗಳನ್ನು ನೀಡಲು, ಈ ಕೆಳಗಿನ ಷರತ್ತುಗಳನ್ನು ಪೂರೈಸಬೇಕು:
1. ಮಾಪನದ ನಿಖರತೆಯು ಹೆಚ್ಚಾಗಿ ಸಂಪರ್ಕಗಳ ವಿಶ್ವಾಸಾರ್ಹತೆಯನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ, ಆದ್ದರಿಂದ ಮಾಪನದ ಮೊದಲು ಸಂಪರ್ಕಗಳನ್ನು ಬೆಸುಗೆ ಹಾಕಲು ಸೂಚಿಸಲಾಗುತ್ತದೆ;
2. ಮೂಲದಲ್ಲಿ ವೋಲ್ಟೇಜ್ ಡ್ರಾಪ್ನ ಪ್ರಭಾವವನ್ನು ತಪ್ಪಿಸಲು ನೇರ ಪ್ರವಾಹದ ಮೂಲವು ನೆಟ್ವರ್ಕ್ ಅಥವಾ 4-6 V ವೋಲ್ಟೇಜ್ನೊಂದಿಗೆ ಚೆನ್ನಾಗಿ ಚಾರ್ಜ್ ಮಾಡಲಾದ ಬ್ಯಾಟರಿಯಾಗಿರಬೇಕು;
3. ವಾದ್ಯಗಳ ಓದುವಿಕೆಯನ್ನು ಏಕಕಾಲದಲ್ಲಿ ಮಾಡಬೇಕು.
ಸೇತುವೆಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಪ್ರತಿರೋಧ ಮಾಪನವನ್ನು ಮುಖ್ಯವಾಗಿ ಹೆಚ್ಚಿನ ಮಾಪನ ನಿಖರತೆಯನ್ನು ಪಡೆಯಲು ಅಗತ್ಯವಿರುವ ಸಂದರ್ಭಗಳಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ. ನಿಖರತೆ ಸೇತುವೆ ವಿಧಾನಗಳು 0.001% ತಲುಪುತ್ತದೆ. ಸೇತುವೆ ಮಾಪನ ಮಿತಿಗಳು 10-5 ರಿಂದ 106 ಓಎಚ್ಎಮ್ಗಳ ವ್ಯಾಪ್ತಿಯಲ್ಲಿರುತ್ತವೆ.
ಮೈಕ್ರೋಓಮ್ಮೀಟರ್ ಹೆಚ್ಚಿನ ಸಂಖ್ಯೆಯ ಅಳತೆಗಳನ್ನು ಅಳೆಯುತ್ತದೆ, ಉದಾಹರಣೆಗೆ, ಸಂಪರ್ಕ ಪ್ರತಿರೋಧಗಳು, ಸುರುಳಿಗಳ ನಡುವಿನ ಸಂಪರ್ಕಗಳು.
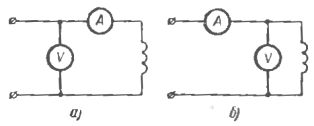
ಅಕ್ಕಿ. 1. ಆಮ್ಮೀಟರ್-ವೋಲ್ಟ್ಮೀಟರ್ ವಿಧಾನದಿಂದ DC ಸುರುಳಿಗಳ ಪ್ರತಿರೋಧವನ್ನು ಅಳೆಯುವ ಯೋಜನೆ
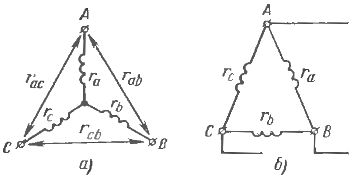
ಅಕ್ಕಿ. 2. ಸ್ಟಾರ್ (ಎ) ಮತ್ತು ಡೆಲ್ಟಾ (ಬಿ) ನಲ್ಲಿ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಪ್ರತಿರೋಧವನ್ನು ಅಳೆಯುವ ಯೋಜನೆ
ಉಪಕರಣವನ್ನು ಸರಿಹೊಂದಿಸುವ ಅಗತ್ಯವಿಲ್ಲದ ಕಾರಣ ಅಳತೆಗಳನ್ನು ತ್ವರಿತವಾಗಿ ಮಾಡಲಾಗುತ್ತದೆ. 10 kW ವರೆಗಿನ ಶಕ್ತಿಯನ್ನು ಹೊಂದಿರುವ ಮೋಟಾರ್ಗಳಿಗೆ DC ವಿಂಡಿಂಗ್ನ ಪ್ರತಿರೋಧವನ್ನು ಅದರ ಕಾರ್ಯಾಚರಣೆಯ ಅಂತ್ಯದ ನಂತರ 5 ಗಂಟೆಗಳಿಗಿಂತ ಮುಂಚೆಯೇ ಅಳೆಯಲಾಗುತ್ತದೆ ಮತ್ತು 10 kW ಗಿಂತ ಹೆಚ್ಚಿನ ಮೋಟಾರ್ಗಳಿಗೆ - ಸ್ಥಾಯಿ ರೋಟರ್ನೊಂದಿಗೆ 8 ಗಂಟೆಗಳಿಗಿಂತ ಕಡಿಮೆಯಿಲ್ಲ. ವಿಂಡ್ಗಳ ಎಲ್ಲಾ ಆರು ತುದಿಗಳನ್ನು ಮೋಟಾರ್ ಸ್ಟೇಟರ್ನಿಂದ ತೆಗೆದುಹಾಕಿದರೆ, ನಂತರ ಪ್ರತಿ ಹಂತದ ಅಂಕುಡೊಂಕಾದ ಮೇಲೆ ಮಾಪನವನ್ನು ಪ್ರತ್ಯೇಕವಾಗಿ ಮಾಡಲಾಗುತ್ತದೆ.
ವಿಂಡ್ಗಳನ್ನು ಆಂತರಿಕವಾಗಿ ನಕ್ಷತ್ರಕ್ಕೆ ಸಂಪರ್ಕಿಸಿದಾಗ, ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕಿಸಲಾದ ಎರಡು ಹಂತಗಳ ಪ್ರತಿರೋಧವನ್ನು ಜೋಡಿಯಾಗಿ ಅಳೆಯಲಾಗುತ್ತದೆ (Fig. 2, a). ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಪ್ರತಿ ಹಂತದ ಪ್ರತಿರೋಧ
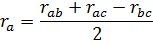
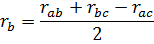
ಆಂತರಿಕ ಡೆಲ್ಟಾ ಸಂಪರ್ಕದೊಂದಿಗೆ, ರೇಖೀಯ ಹಿಡಿಕಟ್ಟುಗಳ (Fig. 2, b) ಪ್ರತಿ ಜೋಡಿ ಔಟ್ಪುಟ್ ತುದಿಗಳ ನಡುವಿನ ಪ್ರತಿರೋಧವನ್ನು ಅಳೆಯಿರಿ. ಎಲ್ಲಾ ಹಂತಗಳ ಪ್ರತಿರೋಧಗಳು ಸಮಾನವಾಗಿವೆ ಎಂದು ಭಾವಿಸಿದರೆ, ಪ್ರತಿ ಹಂತದ ಪ್ರತಿರೋಧವನ್ನು ಇವರಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ:

ಬಹು-ವೇಗದ ಮೋಟಾರ್ಗಳಿಗಾಗಿ, ಪ್ರತಿ ಅಂಕುಡೊಂಕಾದ ಅಥವಾ ಪ್ರತಿ ವಿಭಾಗಕ್ಕೆ ಒಂದೇ ರೀತಿಯ ಅಳತೆಗಳನ್ನು ಮಾಡಲಾಗುತ್ತದೆ.
ಎಸಿ ಯಂತ್ರಗಳ ವಿಂಡ್ಗಳ ಸರಿಯಾದ ಸಂಪರ್ಕವನ್ನು ಪರಿಶೀಲಿಸಲಾಗುತ್ತಿದೆ. ಕೆಲವೊಮ್ಮೆ, ವಿಶೇಷವಾಗಿ ದುರಸ್ತಿ ಮಾಡಿದ ನಂತರ, ಇಂಡಕ್ಷನ್ ಮೋಟಾರಿನ ನೀರಿನ ತುದಿಗಳು ಗುರುತಿಸಲಾಗದವುಗಳಾಗಿ ಹೊರಹೊಮ್ಮುತ್ತವೆ, ಅಂಕುಡೊಂಕಾದ ಪ್ರಾರಂಭ ಮತ್ತು ತುದಿಗಳನ್ನು ನಿರ್ಧರಿಸಲು ಇದು ಅಗತ್ಯವಾಗಿರುತ್ತದೆ. ನಿರ್ಧರಿಸಲು ಎರಡು ಸಾಮಾನ್ಯ ಮಾರ್ಗಗಳಿವೆ.
ಮೊದಲ ವಿಧಾನದ ಪ್ರಕಾರ, ಪ್ರತ್ಯೇಕ ಹಂತಗಳ ವಿಂಡ್ಗಳ ತುದಿಗಳನ್ನು ಮೊದಲು ಜೋಡಿಯಾಗಿ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ನಂತರ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಅಂಜೂರದ ಪ್ರಕಾರ ಜೋಡಿಸಲಾಗುತ್ತದೆ. 3, ಎ."ಪ್ಲಸ್" ಮೂಲವು ಒಂದು ಹಂತದ ಪ್ರಾರಂಭಕ್ಕೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, "ಮೈನಸ್" ಅಂತ್ಯಕ್ಕೆ.
C1, C2, C3 ಅನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಹಂತಗಳು 1, 2, 3 ಮತ್ತು C4, C5, C6 - 4, 5, 6 ರ ಅಂತ್ಯದ ಆರಂಭದಲ್ಲಿ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ. ಇತರ ಹಂತಗಳ ವಿಂಡ್ಗಳಲ್ಲಿ ಪ್ರಸ್ತುತವನ್ನು ಬದಲಾಯಿಸುವ ಕ್ಷಣದಲ್ಲಿ (2 -3) C2 ಮತ್ತು C3 ನ ಆರಂಭದಲ್ಲಿ ಧ್ರುವೀಯತೆ "ಮೈನಸ್" ಮತ್ತು C5 ಮತ್ತು C6 ನ ತುದಿಗಳಲ್ಲಿ "ಪ್ಲಸ್" ನೊಂದಿಗೆ ಎಲೆಕ್ಟ್ರೋಮೋಟಿವ್ ಬಲವನ್ನು ಪ್ರೇರೇಪಿಸುತ್ತದೆ. ಹಂತ 1 ರಲ್ಲಿ ಪ್ರಸ್ತುತ ಆಫ್ ಆಗಿರುವ ಕ್ಷಣದಲ್ಲಿ, ಹಂತ 2 ಮತ್ತು 3 ರ ತುದಿಯಲ್ಲಿರುವ ಧ್ರುವೀಯತೆಯು ಅವರು ಆನ್ ಆಗಿರುವಾಗ ಧ್ರುವೀಯತೆಗೆ ವಿರುದ್ಧವಾಗಿರುತ್ತದೆ.
ಹಂತ 1 ಅನ್ನು ಗುರುತಿಸಿದ ನಂತರ, ನೇರ ಪ್ರವಾಹದ ಮೂಲವು ಹಂತ 3 ಕ್ಕೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, ಅದೇ ಸಮಯದಲ್ಲಿ ಮಿಲಿವೋಲ್ಟ್ಮೀಟರ್ ಅಥವಾ ಗ್ಯಾಲ್ವನೋಮೀಟರ್ನ ಸೂಜಿ ಅದೇ ದಿಕ್ಕಿನಲ್ಲಿ ವಿಚಲನಗೊಂಡರೆ, ನಂತರ ವಿಂಡ್ಗಳ ಎಲ್ಲಾ ತುದಿಗಳನ್ನು ಸರಿಯಾಗಿ ಗುರುತಿಸಲಾಗುತ್ತದೆ.
ಎರಡನೇ ವಿಧಾನದ ಪ್ರಕಾರ ಪ್ರಾರಂಭ ಮತ್ತು ಅಂತ್ಯವನ್ನು ನಿರ್ಧರಿಸಲು, ಮೋಟಾರ್ ವಿಂಡ್ಗಳನ್ನು ನಕ್ಷತ್ರ ಅಥವಾ ಡೆಲ್ಟಾ (Fig. 3, b) ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಮತ್ತು ಏಕ-ಹಂತದ ಕಡಿಮೆ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಹಂತ 2 ಗೆ ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, C1 ಮತ್ತು C2, ಹಾಗೆಯೇ C2 ಮತ್ತು C3 ನ ತುದಿಗಳ ನಡುವೆ, ಸರಬರಾಜು ಮಾಡಿದ ಒಂದಕ್ಕಿಂತ ಸ್ವಲ್ಪ ಹೆಚ್ಚಿನ ವೋಲ್ಟೇಜ್ ಉದ್ಭವಿಸುತ್ತದೆ ಮತ್ತು C1 ಮತ್ತು C3 ನ ತುದಿಗಳ ನಡುವೆ ವೋಲ್ಟೇಜ್ ಶೂನ್ಯವಾಗಿರುತ್ತದೆ. ಹಂತಗಳು 1 ಮತ್ತು 3 ರ ತುದಿಗಳನ್ನು ತಪ್ಪಾಗಿ ಸಂಪರ್ಕಿಸಿದರೆ, C1 ಮತ್ತು C2, C2 ಮತ್ತು C3 ನ ತುದಿಗಳ ನಡುವಿನ ವೋಲ್ಟೇಜ್ ಪೂರೈಕೆಗಿಂತ ಕಡಿಮೆಯಿರುತ್ತದೆ. ಮೊದಲ ಎರಡು ಹಂತಗಳ ಗುರುತುಗಳ ಪರಸ್ಪರ ನಿರ್ಣಯದ ನಂತರ, ಮೂರನೆಯದನ್ನು ಇದೇ ರೀತಿಯಲ್ಲಿ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ.
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಆರಂಭಿಕ ಸಕ್ರಿಯಗೊಳಿಸುವಿಕೆ. ಇಂಜಿನ್ನ ಸಂಪೂರ್ಣ ಸೇವೆಯನ್ನು ಸ್ಥಾಪಿಸಲು, ಅದನ್ನು ಐಡಲ್ ಮತ್ತು ಲೋಡ್ ಅಡಿಯಲ್ಲಿ ಪರೀಕ್ಷಿಸಲಾಗುತ್ತದೆ. ಬೇರಿಂಗ್ಗಳನ್ನು ಗ್ರೀಸ್ನೊಂದಿಗೆ ತುಂಬುವ ಮೂಲಕ ಯಾಂತ್ರಿಕ ಭಾಗಗಳ ಸ್ಥಿತಿಯನ್ನು ಮರುಪರಿಶೀಲಿಸಿ.
ಮೋಟಾರಿನ ಚಲನೆಯ ಸುಲಭತೆಯನ್ನು ಕೈಯಿಂದ ಶಾಫ್ಟ್ ಅನ್ನು ತಿರುಗಿಸುವ ಮೂಲಕ ಪರಿಶೀಲಿಸಲಾಗುತ್ತದೆ, ಆದರೆ ರೋಟರ್ ಮತ್ತು ಸ್ಟೇಟರ್, ಹಾಗೆಯೇ ಫ್ಯಾನ್ ಮತ್ತು ವಸತಿ ನಡುವಿನ ಸಂಪರ್ಕವನ್ನು ಸೂಚಿಸುವ ಯಾವುದೇ ಕ್ರ್ಯಾಕ್ಲಿಂಗ್, ರ್ಯಾಟ್ಲಿಂಗ್ ಮತ್ತು ಅಂತಹುದೇ ಶಬ್ದಗಳು ಇರಬಾರದು, ನಂತರ ಸರಿಯಾದ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗುವಿಕೆಯನ್ನು ಪರಿಶೀಲಿಸಲಾಗಿದೆ, ಇದಕ್ಕಾಗಿ ಎಂಜಿನ್ ಸಂಕ್ಷಿಪ್ತವಾಗಿ ಆನ್ ಆಗುತ್ತದೆ.
ಮೊದಲ ಸಕ್ರಿಯಗೊಳಿಸುವಿಕೆಯ ಅವಧಿಯು 1-2 ಸೆ. ಅದೇ ಸಮಯದಲ್ಲಿ, ಆರಂಭಿಕ ಪ್ರಸ್ತುತ ಮೌಲ್ಯವನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡಲಾಗುತ್ತದೆ. ಇಂಜಿನ್ನ ಅಲ್ಪಾವಧಿಯ ಪ್ರಾರಂಭವನ್ನು 2-3 ಬಾರಿ ಪುನರಾವರ್ತಿಸಲು ಸೂಚಿಸಲಾಗುತ್ತದೆ, ಕ್ರಮೇಣ ಸ್ವಿಚ್ ಮಾಡುವ ಅವಧಿಯನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ, ನಂತರ ಎಂಜಿನ್ ಅನ್ನು ದೀರ್ಘಕಾಲದವರೆಗೆ ಸ್ವಿಚ್ ಮಾಡಬಹುದು. ಎಂಜಿನ್ ನಿಷ್ಕ್ರಿಯವಾಗಿರುವಾಗ, ಚಾಲನೆಯಲ್ಲಿರುವ ಗೇರ್ ಉತ್ತಮ ಸ್ಥಿತಿಯಲ್ಲಿದೆ ಎಂದು ನಿಯಂತ್ರಕ ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಬೇಕು: ಯಾವುದೇ ಕಂಪನಗಳು, ಪ್ರಸ್ತುತ ಉಲ್ಬಣಗಳು, ಬೇರಿಂಗ್ಗಳ ತಾಪನ ಇಲ್ಲ.
ಪರೀಕ್ಷಾ ಫಲಿತಾಂಶಗಳು ತೃಪ್ತಿಕರವಾಗಿದ್ದರೆ, ಎಂಜಿನ್ ಅನ್ನು ಯಾಂತ್ರಿಕ ಭಾಗದೊಂದಿಗೆ ಒಟ್ಟಿಗೆ ಆನ್ ಮಾಡಲಾಗುತ್ತದೆ ಅಥವಾ ವಿಶೇಷ ಸ್ಟ್ಯಾಂಡ್ನಲ್ಲಿ ಪರೀಕ್ಷಿಸಲಾಗುತ್ತದೆ. ಯಂತ್ರದ ಮುಖ್ಯ ಬ್ಲಾಕ್ಗಳು ಮತ್ತು ವಿಂಡ್ಗಳ ತಾಪಮಾನ, ವಿದ್ಯುತ್ ಅಂಶ, ಘಟಕಗಳ ಬೇರಿಂಗ್ಗಳ ನಯಗೊಳಿಸುವ ಸ್ಥಿತಿಯನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡುವಾಗ ಎಂಜಿನ್ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಪರಿಶೀಲಿಸುವ ಸಮಯವು 5 ರಿಂದ 8 ಗಂಟೆಗಳವರೆಗೆ ಬದಲಾಗುತ್ತದೆ.