ಸೆಲ್ಸಿನ್ಸ್: ಉದ್ದೇಶ, ಸಾಧನ, ಕ್ರಿಯೆಯ ತತ್ವ
 ಸೆಲ್ಸಿನ್ಗಳು ವಿಶೇಷ ರೀತಿಯ ಪರ್ಯಾಯ ವಿದ್ಯುತ್ ಯಂತ್ರವಾಗಿದ್ದು, ಕೆಲವು ವ್ಯಾಟ್ಗಳಿಂದ ಹಲವಾರು ನೂರು ವ್ಯಾಟ್ಗಳವರೆಗೆ (ಕಿಲೋವ್ಯಾಟ್ಗಿಂತ ಕಡಿಮೆ) ಶಕ್ತಿಯನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಪರಸ್ಪರ ಯಾಂತ್ರಿಕ ಸಂಪರ್ಕವನ್ನು ಹೊಂದಿರದ ಸಾಧನಗಳ ನಡುವೆ ವಿದ್ಯುನ್ಮಾನವಾಗಿ ತಿರುಗುವಿಕೆಯ ಯಾಂತ್ರಿಕ ಕೋನವನ್ನು ದೂರದಿಂದಲೇ ರವಾನಿಸಲು selsyn ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ.
ಸೆಲ್ಸಿನ್ಗಳು ವಿಶೇಷ ರೀತಿಯ ಪರ್ಯಾಯ ವಿದ್ಯುತ್ ಯಂತ್ರವಾಗಿದ್ದು, ಕೆಲವು ವ್ಯಾಟ್ಗಳಿಂದ ಹಲವಾರು ನೂರು ವ್ಯಾಟ್ಗಳವರೆಗೆ (ಕಿಲೋವ್ಯಾಟ್ಗಿಂತ ಕಡಿಮೆ) ಶಕ್ತಿಯನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಪರಸ್ಪರ ಯಾಂತ್ರಿಕ ಸಂಪರ್ಕವನ್ನು ಹೊಂದಿರದ ಸಾಧನಗಳ ನಡುವೆ ವಿದ್ಯುನ್ಮಾನವಾಗಿ ತಿರುಗುವಿಕೆಯ ಯಾಂತ್ರಿಕ ಕೋನವನ್ನು ದೂರದಿಂದಲೇ ರವಾನಿಸಲು selsyn ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ.
ಪ್ರತಿ ಸೆಲ್ಸಿನ್ ಒಂದು ಸ್ಟೇಟರ್ ಮತ್ತು ರೋಟರ್ ಅನ್ನು ಹೊಂದಿದೆ, ಅದರ ಮೇಲೆ ಪರ್ಯಾಯ ವಿದ್ಯುತ್ ವಿಂಡ್ಗಳು ನೆಲೆಗೊಂಡಿವೆ. ಸ್ಟೇಟರ್ನಲ್ಲಿ ಒಂದೇ ಅಂಕುಡೊಂಕಾದ ಸುರುಳಿಗಳು ಮತ್ತು ರೋಟರ್ನಲ್ಲಿ ಮೂರು ಅಂಕುಡೊಂಕಾದ ಅಂಕುಡೊಂಕಾದ ಸುರುಳಿಗಳಿವೆ, ಮತ್ತು ಪ್ರತಿಯಾಗಿ, ಸ್ಟೇಟರ್ನಲ್ಲಿ ಮೂರು ಅಂಕುಡೊಂಕಾದ ಅಂಕುಡೊಂಕಾದ ಮತ್ತು ರೋಟರ್ನಲ್ಲಿ ಒಂದು ಅಂಕುಡೊಂಕಾದ ವಿಂಡಿಂಗ್, ಮತ್ತು ಅಂತಿಮವಾಗಿ, ಇದರೊಂದಿಗೆ ಸ್ಟೇಟರ್ನಲ್ಲಿ ಮೂರು ವಿಂಡ್ಗಳು ಮತ್ತು ರೋಟರ್ನಲ್ಲಿ ಅದೇ ಅಂಕುಡೊಂಕಾದ ಜೊತೆ.
ಸ್ವಯಂ ನಿಯಂತ್ರಣ ಯೋಜನೆಗಳಲ್ಲಿ ಅವರ ಉದ್ದೇಶದ ಪ್ರಕಾರ, ಸೆಲ್ಸಿನ್ಗಳನ್ನು ವಿಂಗಡಿಸಲಾಗಿದೆ:
- ಸೆಲ್ಸಿನ್ ಸಂವೇದಕಗಳು,
- ಸೆಲ್ಸಿನ್ ಗ್ರಾಹಕಗಳು
- ಭೇದಾತ್ಮಕ.
ಸೆಲ್ಸಿನ್ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳಲು, ಅಂಜೂರವನ್ನು ಪರಿಗಣಿಸಿ. 1, ಎ.
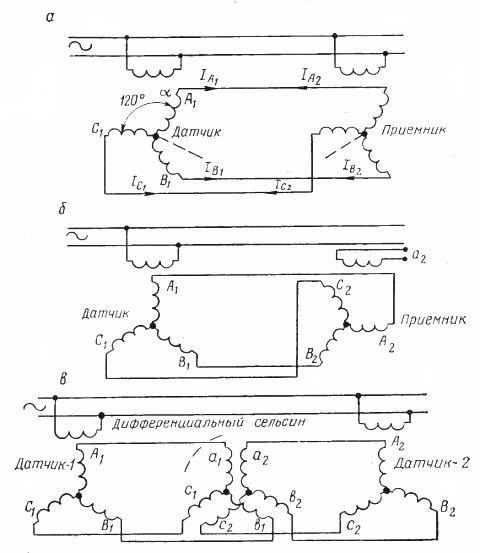
ಅಕ್ಕಿ. 1. ಸೆಲ್ಸಿನ್ ಅನ್ನು ಆನ್ ಮಾಡುವ ಯೋಜನೆಗಳು: a - ಸಿಸ್ಟಮ್ ಸಂವೇದಕದ ಪ್ರಕಾರ - ರಿಸೀವರ್; ಬೌ - ಟ್ರಾನ್ಸ್ಫಾರ್ಮರ್ ಮೋಡ್ನಲ್ಲಿ ಟ್ರಾನ್ಸ್ಫಾರ್ಮರ್ ರಿಸೀವರ್; ಸಿ - ಭೇದಾತ್ಮಕ
ಸೆಲ್ಸಿನ್-ಸೆನ್ಸರ್ ಮತ್ತು ಸೆಲ್ಸಿನ್-ರಿಸೀವರ್ ತಮ್ಮ ಸಿಂಗಲ್-ವಿಂಡಿಂಗ್ ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳೊಂದಿಗೆ ಒಂದೇ ಎಸಿ ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿವೆ, ಮತ್ತು ಮೂರು-ಅಂಕುಡೊಂಕಾದ ರೋಟರ್ ವಿಂಡ್ಗಳು ಪರಸ್ಪರ ಸಂಪರ್ಕ ಹೊಂದಿವೆ. ನೀವು ಈಗ ಸಂವೇದಕ ರೋಟರ್ ಅನ್ನು ಯಾವುದೇ ಕೋನಕ್ಕೆ ತಿರುಗಿಸಿದರೆ, ರಿಸೀವರ್ ರೋಟರ್ ಅದೇ ಕೋನಕ್ಕೆ ತಿರುಗುತ್ತದೆ. ಸಂವೇದಕ ರೋಟರ್ ಯಾದೃಚ್ಛಿಕ ವೇಗದಲ್ಲಿ ನಿರಂತರವಾಗಿ ತಿರುಗಿದರೆ, ರಿಸೀವರ್ ರೋಟರ್ ಅದೇ ವೇಗದಲ್ಲಿ ತಿರುಗುತ್ತದೆ.
ಸೆಲ್ಸಿನ್ ಸಂಪರ್ಕದ ಕ್ರಿಯೆಯು ವಿದ್ಯುತ್ಕಾಂತೀಯ ಇಂಡಕ್ಷನ್ ತತ್ವವನ್ನು ಆಧರಿಸಿದೆ, ಅದು ಈ ಕೆಳಗಿನಂತಿರುತ್ತದೆ. ಏಕ-ಅಂಕುಡೊಂಕಾದ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನಲ್ಲಿನ ಪರ್ಯಾಯ ಪ್ರವಾಹವು ಮೂರು-ಅಂಕುಡೊಂಕಾದ ರೋಟರ್ ವಿಂಡಿಂಗ್ನಲ್ಲಿ ಪ್ರವಾಹಗಳನ್ನು ಪ್ರೇರೇಪಿಸುತ್ತದೆ, ಅದರ ಮೌಲ್ಯಗಳು ರೋಟರ್ ಮತ್ತು ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳ ಸಾಪೇಕ್ಷ ಸ್ಥಾನವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ.
ಎರಡು ಸೆಲ್ಸಿನ್ಗಳ ರೋಟರ್ಗಳು ಅವುಗಳ ಸ್ಟೇಟರ್ಗಳಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಸಮಾನ ಅಂತರದಲ್ಲಿದ್ದರೆ, ರೋಟರ್ಗಳ ಸಂಪರ್ಕಿಸುವ ತಂತಿಗಳಲ್ಲಿನ ಪ್ರವಾಹಗಳು ಪರಸ್ಪರ ಸಮಾನವಾಗಿರುತ್ತವೆ ಮತ್ತು ಪರಸ್ಪರ ವಿರುದ್ಧವಾಗಿರುತ್ತವೆ ಮತ್ತು ಆದ್ದರಿಂದ ಪ್ರತಿ ಸುರುಳಿಯಲ್ಲಿನ ಪ್ರವಾಹವು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ. ಪರಿಣಾಮವಾಗಿ, ಸೆಲ್ಸಿನ್ ಎರಡರ ಶಾಫ್ಟ್ ಟಾರ್ಕ್ ಶೂನ್ಯವಾಗಿರುತ್ತದೆ.
ನೀವು ಈಗ ಹಸ್ತಚಾಲಿತವಾಗಿ ಅಥವಾ ಬೇರೆ ರೀತಿಯಲ್ಲಿ ಸೆಲ್ಸಿನ್ ಸಂವೇದಕದ ರೋಟರ್ ಅನ್ನು ಒಂದು ನಿರ್ದಿಷ್ಟ ಕೋನಕ್ಕೆ ತಿರುಗಿಸಿದರೆ, ನಂತರ ರೋಟರ್ಗಳ ನಡುವಿನ ಪ್ರವಾಹಗಳ ಸಮತೋಲನವು ತೊಂದರೆಗೊಳಗಾಗುತ್ತದೆ ಮತ್ತು ಸೆಲ್ಸಿನ್ ರಿಸೀವರ್ನ ಶಾಫ್ಟ್ನಲ್ಲಿ ಟಾರ್ಕ್ ಕಾಣಿಸಿಕೊಳ್ಳುತ್ತದೆ, ಇದರಿಂದಾಗಿ ಅದರ ರೋಟರ್ ತಿರುಗುತ್ತದೆ. , ಪ್ರವಾಹಗಳ ಅಸಮತೋಲನವು ಕಣ್ಮರೆಯಾಗುತ್ತದೆ, ಅಂದರೆ, ಈ ರೋಟರ್ ಸಿಂಕ್ರೊಸೆನ್ಸರ್ನಂತೆಯೇ ಅದೇ ಸ್ಥಾನವನ್ನು ತೆಗೆದುಕೊಳ್ಳುವವರೆಗೆ.

ಸ್ವಯಂ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ, ಸೆಲ್ಸಿನ್ ರಿಸೀವರ್ ಸಾಮಾನ್ಯವಾಗಿ ಟ್ರಾನ್ಸ್ಫಾರ್ಮರ್ ಮೋಡ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ (Fig. 1, b). ಈ ಸಂದರ್ಭದಲ್ಲಿ, ರಿಸೀವರ್ನ ರೋಟರ್ ಸ್ಥಿರವಾಗಿರುತ್ತದೆ, ಮತ್ತು ಅದರ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ನೆಟ್ವರ್ಕ್ನಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸಲಾಗುತ್ತದೆ. ಈ ಸುರುಳಿಯಲ್ಲಿ ಇ ಪ್ರೇರಿತವಾಗಿದೆ. ಇತ್ಯಾದಿ v. ರೋಟರ್ನ ಬದಿಯಲ್ಲಿ, ಸೆಲ್ಸಿನ್ ಸಂವೇದಕದ ರೋಟರ್ನ ಸ್ಥಾನದಿಂದಾಗಿ ಪ್ರವಾಹಗಳು ಹರಿಯುವ ವಿಂಡ್ಗಳ ಮೂಲಕ.ಇದರರ್ಥ ಇ ಮೌಲ್ಯ. ಇತ್ಯಾದಿ ಟರ್ಮಿನಲ್ಗಳೊಂದಿಗೆ, ರಿಸೀವರ್ನ ರೋಟರ್ ಸಂವೇದಕದ ತಿರುಗುವಿಕೆಯ ಕೋನಕ್ಕೆ ಅನುಗುಣವಾಗಿರುತ್ತದೆ.
ಆರಂಭಿಕ ಸ್ಥಾನದಲ್ಲಿ, ರೋಟಾರ್ಗಳನ್ನು ಪರಸ್ಪರ 90 ° ನಿಂದ ಸ್ಥಳಾಂತರಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಈ ಸಂದರ್ಭದಲ್ಲಿ ಇ. ಇತ್ಯಾದಿ s. ಶೂನ್ಯವಾಗಿರುತ್ತದೆ. ಈಗ ರೋಟರ್ ಸಂವೇದಕವನ್ನು ತಿರುಗಿಸಲಾಗಿದೆ, ರಿಸೀವರ್ ರೋಟರ್ನಲ್ಲಿ ಇ ಪ್ರೇರಿತವಾಗುತ್ತದೆ. ಇತ್ಯಾದಿ Ep ಯೊಂದಿಗೆ, ರೋಟರ್ಗಳ ಡೈವರ್ಜೆನ್ಸ್ ಕೋನಕ್ಕೆ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ
Epr = Emax x sinθ
ಎರಡು ಅಕ್ಷಗಳ ತಿರುಗುವಿಕೆಯ ಕೋನಗಳಲ್ಲಿನ ವ್ಯತ್ಯಾಸವನ್ನು ನಿಯಂತ್ರಿಸಲು ಅಗತ್ಯವಿರುವ ಸಂದರ್ಭಗಳಲ್ಲಿ ಡಿಫರೆನ್ಷಿಯಲ್ ಸೆಲ್ಸಿನ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಅಂದರೆ. ಅವರ ವ್ಯತ್ಯಾಸ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಎರಡು ಸೆಲ್ಸಿನ್ ಸಂವೇದಕಗಳು ಎರಡು ಶಾಫ್ಟ್ಗಳಲ್ಲಿ ನೆಲೆಗೊಂಡಿವೆ, ಇವುಗಳ ವೇಗವನ್ನು ಪರಸ್ಪರ ಹೋಲಿಸಲಾಗುತ್ತದೆ. ಸೆಲ್ಸಿನ್, ಇದು ಡಿಫರೆನ್ಷಿಯಲ್ (Fig. 1, in). ಸೆಲ್ಸಿನ್ ಡಿಫರೆನ್ಷಿಯಲ್ ರೋಟರ್ನ ತಿರುಗುವಿಕೆಯ ಕೋನವು ಸೆಲ್ಸಿನ್ ಸಂವೇದಕಗಳ ತಿರುಗುವಿಕೆಯ ಕೋನಗಳ ನಡುವಿನ ವ್ಯತ್ಯಾಸಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.