ಆವರ್ತನ ಪರಿವರ್ತಕದ ಕಾರ್ಯಾಚರಣೆಯ ತತ್ವ ಮತ್ತು ಬಳಕೆದಾರರಿಗೆ ಅದರ ಆಯ್ಕೆಯ ಮಾನದಂಡ
 ಅಸಮಕಾಲಿಕ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಾಗಿ ನಿಯಂತ್ರಣ ಸಾಧನವಾಗಿ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆಮಾಡುವ ಉದ್ದೇಶ, ಕಾರ್ಯಾಚರಣೆಯ ತತ್ವ ಮತ್ತು ಮಾನದಂಡಗಳ ಸಂಕ್ಷಿಪ್ತ ವಿವರಣೆ.
ಅಸಮಕಾಲಿಕ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಾಗಿ ನಿಯಂತ್ರಣ ಸಾಧನವಾಗಿ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆಮಾಡುವ ಉದ್ದೇಶ, ಕಾರ್ಯಾಚರಣೆಯ ತತ್ವ ಮತ್ತು ಮಾನದಂಡಗಳ ಸಂಕ್ಷಿಪ್ತ ವಿವರಣೆ.
ಅಳಿಲು ಕೇಜ್ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ ಇಂದು ಇದು ವಿವಿಧ ಯಂತ್ರಗಳು ಮತ್ತು ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ನಿಯಂತ್ರಿಸಲು ಅತ್ಯಂತ ಬೃಹತ್ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹ ಸಾಧನವಾಗಿದೆ. ಆದರೆ ಪ್ರತಿಯೊಂದು ಪದಕಕ್ಕೂ ಒಂದು ಫ್ಲಿಪ್ ಸೈಡ್ ಇರುತ್ತದೆ.
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಎರಡು ಮುಖ್ಯ ಅನಾನುಕೂಲಗಳು ಸರಳವಾದ ಅಸಾಧ್ಯತೆಯಾಗಿದೆ ರೋಟರ್ ವೇಗ ನಿಯಂತ್ರಣ, ಅತಿ ದೊಡ್ಡ ಆರಂಭಿಕ ಪ್ರವಾಹ - ಐದು, ನಾಮಮಾತ್ರದ ಏಳು ಬಾರಿ. ಯಾಂತ್ರಿಕ ನಿಯಂತ್ರಣ ಸಾಧನಗಳನ್ನು ಮಾತ್ರ ಬಳಸಿದರೆ, ಈ ಅನನುಕೂಲಗಳು ದೊಡ್ಡ ಶಕ್ತಿಯ ನಷ್ಟ ಮತ್ತು ಆಘಾತ ಯಾಂತ್ರಿಕ ಹೊರೆಗಳಿಗೆ ಕಾರಣವಾಗುತ್ತವೆ. ಇದು ಉಪಕರಣದ ಸೇವಾ ಜೀವನದ ಮೇಲೆ ಅತ್ಯಂತ ಋಣಾತ್ಮಕ ಪರಿಣಾಮವನ್ನು ಬೀರುತ್ತದೆ.
ಆವರ್ತನ ಪರಿವರ್ತಕ

ಆವರ್ತನ ಪರಿವರ್ತಕ ನಾಡಿ ಅಗಲ ನಿಯಂತ್ರಣದೊಂದಿಗೆ (PWM ನೊಂದಿಗೆ PE) 4-5 ಬಾರಿ ಒಳಹರಿವಿನ ಪ್ರವಾಹಗಳನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ. ಇದು ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ನ ಮೃದುವಾದ ಪ್ರಾರಂಭವನ್ನು ಒದಗಿಸುತ್ತದೆ ಮತ್ತು ನಿರ್ದಿಷ್ಟ ವೋಲ್ಟೇಜ್ / ಆವರ್ತನ ಅನುಪಾತದ ಪ್ರಕಾರ ಡ್ರೈವ್ ಅನ್ನು ನಿಯಂತ್ರಿಸುತ್ತದೆ.
ಆವರ್ತನ ಪರಿವರ್ತಕವು 50% ವರೆಗೆ ಶಕ್ತಿಯ ಉಳಿತಾಯವನ್ನು ಒದಗಿಸುತ್ತದೆ. ನೆರೆಯ ಸಾಧನಗಳ ನಡುವೆ ಪ್ರತಿಕ್ರಿಯೆಯನ್ನು ಅನುಮತಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ, ಅಂದರೆ. ಕಾರ್ಯಕ್ಕಾಗಿ ಸ್ವಯಂ-ಹೊಂದಾಣಿಕೆ ಉಪಕರಣಗಳು ಮತ್ತು ಸಂಪೂರ್ಣ ಸಿಸ್ಟಮ್ನ ಆಪರೇಟಿಂಗ್ ಷರತ್ತುಗಳನ್ನು ಬದಲಾಯಿಸುವುದು.
ಆವರ್ತನ ಪರಿವರ್ತಕದ ಕಾರ್ಯಾಚರಣೆಯ ತತ್ವ
PWM ಆವರ್ತನ ಪರಿವರ್ತಕವಾಗಿದೆ ಡಬಲ್ ಪರಿವರ್ತನೆ ಇನ್ವರ್ಟರ್… ಮೊದಲು ಮುಖ್ಯ ವೋಲ್ಟೇಜ್ 220 ಅಥವಾ 380 V ಅನ್ನು ಇನ್ಪುಟ್ ಡಯೋಡ್ ಸೇತುವೆಯಿಂದ ಸರಿಪಡಿಸಲಾಗುತ್ತದೆ, ನಂತರ ಅದನ್ನು ಕೆಪಾಸಿಟರ್ಗಳನ್ನು ಬಳಸಿ ಸುಗಮಗೊಳಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಫಿಲ್ಟರ್ ಮಾಡಲಾಗುತ್ತದೆ.
ಇದು ರೂಪಾಂತರದ ಮೊದಲ ಹಂತವಾಗಿದೆ. ಎರಡನೇ ಹಂತದಲ್ಲಿ, ನಿರಂತರ ವೋಲ್ಟೇಜ್ನಿಂದ, ನಿಯಂತ್ರಣ ಮೈಕ್ರೋ ಸರ್ಕ್ಯೂಟ್ಗಳನ್ನು ಮತ್ತು ಔಟ್ಪುಟ್ ಸೇತುವೆಯನ್ನು ಬಳಸಿ IGBT ಸ್ವಿಚ್ಗಳು, ನಿರ್ದಿಷ್ಟ ಆವರ್ತನ ಮತ್ತು ಕರ್ತವ್ಯ ಚಕ್ರದೊಂದಿಗೆ PWM ಅನುಕ್ರಮವು ರೂಪುಗೊಳ್ಳುತ್ತದೆ. ಆವರ್ತನ ಪರಿವರ್ತಕದ ಔಟ್ಪುಟ್ನಲ್ಲಿ, ಆಯತಾಕಾರದ ದ್ವಿದಳ ಧಾನ್ಯಗಳ ಪ್ಯಾಕೆಟ್ಗಳನ್ನು ನೀಡಲಾಗುತ್ತದೆ, ಆದರೆ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳ ಇಂಡಕ್ಟನ್ಸ್ ಕಾರಣದಿಂದಾಗಿ, ಅವು ಏಕೀಕರಿಸಲ್ಪಟ್ಟಿವೆ ಮತ್ತು ಅಂತಿಮವಾಗಿ ಸೈನುಸಾಯಿಡ್ಗೆ ಹತ್ತಿರವಿರುವ ವೋಲ್ಟೇಜ್ ಆಗಿ ಬದಲಾಗುತ್ತವೆ.
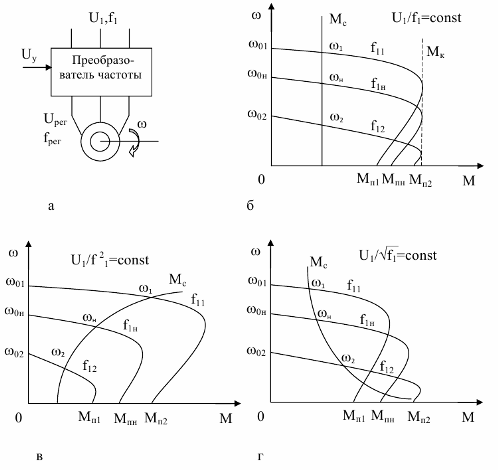 ವೇಗದ ಆವರ್ತನ ನಿಯಂತ್ರಣದೊಂದಿಗೆ ಅಸಮಕಾಲಿಕ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು: a — ಸಂಪರ್ಕ ರೇಖಾಚಿತ್ರ; ಬೌ - ಪ್ರತಿರೋಧದ ಸ್ಥಿರ ಸ್ಥಿರ ಕ್ಷಣದೊಂದಿಗೆ ಲೋಡ್ಗಾಗಿ ಗುಣಲಕ್ಷಣಗಳು; ಸಿ - ಫ್ಯಾನ್ ಲೋಡ್ ಗುಣಲಕ್ಷಣಗಳು; d - ಸ್ಥಿರ ಲೋಡ್ ಟಾರ್ಕ್ ಗುಣಲಕ್ಷಣಗಳು, ತಿರುಗುವಿಕೆಯ ಕೋನೀಯ ವೇಗಕ್ಕೆ ವಿಲೋಮ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ.
ವೇಗದ ಆವರ್ತನ ನಿಯಂತ್ರಣದೊಂದಿಗೆ ಅಸಮಕಾಲಿಕ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು: a — ಸಂಪರ್ಕ ರೇಖಾಚಿತ್ರ; ಬೌ - ಪ್ರತಿರೋಧದ ಸ್ಥಿರ ಸ್ಥಿರ ಕ್ಷಣದೊಂದಿಗೆ ಲೋಡ್ಗಾಗಿ ಗುಣಲಕ್ಷಣಗಳು; ಸಿ - ಫ್ಯಾನ್ ಲೋಡ್ ಗುಣಲಕ್ಷಣಗಳು; d - ಸ್ಥಿರ ಲೋಡ್ ಟಾರ್ಕ್ ಗುಣಲಕ್ಷಣಗಳು, ತಿರುಗುವಿಕೆಯ ಕೋನೀಯ ವೇಗಕ್ಕೆ ವಿಲೋಮ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ.
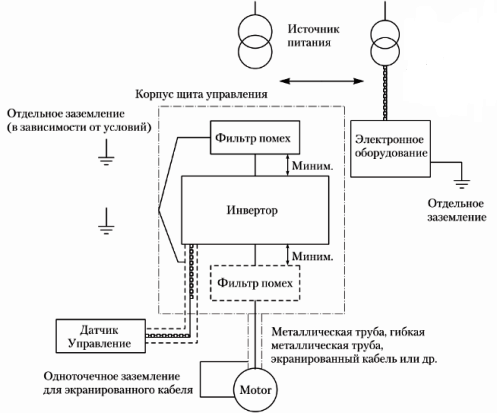 ಆವರ್ತನ ಪರಿವರ್ತಕದಲ್ಲಿ ಸ್ವಿಚಿಂಗ್ ಮಾಡಲು ಒಂದು ವಿಶಿಷ್ಟ ಸರ್ಕ್ಯೂಟ್
ಆವರ್ತನ ಪರಿವರ್ತಕದಲ್ಲಿ ಸ್ವಿಚಿಂಗ್ ಮಾಡಲು ಒಂದು ವಿಶಿಷ್ಟ ಸರ್ಕ್ಯೂಟ್ 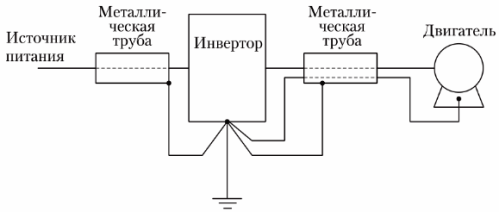 ಆವರ್ತನ ಪರಿವರ್ತಕ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ವಿದ್ಯುತ್ ಮಾರ್ಗಗಳನ್ನು (ಕೇಬಲ್ಗಳು) ಸಂಪರ್ಕಿಸುವ ಉದಾಹರಣೆ
ಆವರ್ತನ ಪರಿವರ್ತಕ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ವಿದ್ಯುತ್ ಮಾರ್ಗಗಳನ್ನು (ಕೇಬಲ್ಗಳು) ಸಂಪರ್ಕಿಸುವ ಉದಾಹರಣೆ
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳನ್ನು ಆಯ್ಕೆಮಾಡುವ ಮಾನದಂಡ

ನಿಯಂತ್ರಣ ವಿಧಾನದಿಂದ
ವಿದ್ಯುತ್, ಕಾರ್ಯಕ್ಷಮತೆಯ ಪ್ರಕಾರ, ಓವರ್ಲೋಡ್ ಸಾಮರ್ಥ್ಯ ಇತ್ಯಾದಿಗಳ ವಿಷಯದಲ್ಲಿ ಸೂಕ್ತವಲ್ಲದ ಪರಿವರ್ತಕಗಳನ್ನು ತಕ್ಷಣವೇ ತ್ಯಜಿಸಿ. ನಿರ್ವಹಣೆಯ ಪ್ರಕಾರಕ್ಕೆ ಅನುಗುಣವಾಗಿ ನೀವು ಯಾವುದನ್ನು ಆಯ್ಕೆ ಮಾಡಬೇಕೆಂದು ನಿರ್ಧರಿಸಬೇಕು. ಸ್ಕೇಲಾರ್ ಅಥವಾ ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣ.
ಹೆಚ್ಚಿನ ಆಧುನಿಕ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣವನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸುತ್ತವೆ, ಆದರೆ ಅಂತಹ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು ಸ್ಕೇಲಾರ್ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳಿಗಿಂತ ಹೆಚ್ಚು ದುಬಾರಿಯಾಗಿದೆ.
ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣವು ಸ್ಥಿರ ದೋಷವನ್ನು ಕಡಿಮೆ ಮಾಡುವ ಮೂಲಕ ಹೆಚ್ಚು ನಿಖರವಾದ ನಿಯಂತ್ರಣವನ್ನು ಅನುಮತಿಸುತ್ತದೆ. ಸ್ಕೇಲಾರ್ ಮೋಡ್ ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ ಮತ್ತು ಔಟ್ಪುಟ್ ಆವರ್ತನದ ನಡುವಿನ ಸ್ಥಿರ ಅನುಪಾತವನ್ನು ಮಾತ್ರ ಬೆಂಬಲಿಸುತ್ತದೆ, ಆದರೆ ಅಭಿಮಾನಿಗಳಿಗೆ, ಉದಾಹರಣೆಗೆ, ಇದು ಸಾಕಷ್ಟು ಸಾಕಾಗುತ್ತದೆ.
ಪ್ರಾರಂಭದಿಂದಲೂ, ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣವು ಇಂಡಕ್ಷನ್ ಮೋಟರ್ಗಳಿಗೆ ಅತ್ಯಂತ ಜನಪ್ರಿಯ ನಿಯಂತ್ರಣ ತಂತ್ರವಾಗಿದೆ. ಪ್ರಸ್ತುತ, ಹೆಚ್ಚಿನ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣ ಅಥವಾ ಸಂವೇದಕರಹಿತ ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣವನ್ನು ಅಳವಡಿಸುತ್ತವೆ (ಈ ಪ್ರವೃತ್ತಿಯು ಮೂಲತಃ ಸ್ಕೇಲಾರ್ ನಿಯಂತ್ರಣವನ್ನು ಅಳವಡಿಸುವ ಮತ್ತು ವೇಗ ಸಂವೇದಕವನ್ನು ಸಂಪರ್ಕಿಸಲು ಟರ್ಮಿನಲ್ಗಳನ್ನು ಹೊಂದಿರದ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳಲ್ಲಿ ಕಂಡುಬರುತ್ತದೆ).
ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣದ ಮೂಲ ತತ್ವವು ಮೋಟಾರಿನ ಮ್ಯಾಗ್ನೆಟೈಸಿಂಗ್ ಪ್ರವಾಹ ಮತ್ತು ಕ್ವಾಡ್ರೇಚರ್ ಪ್ರವಾಹದ ಪ್ರತ್ಯೇಕ ಸ್ವತಂತ್ರ ನಿಯಂತ್ರಣವನ್ನು ಒಳಗೊಂಡಿದೆ, ಇದಕ್ಕೆ ಶಾಫ್ಟ್ನ ಯಾಂತ್ರಿಕ ಟಾರ್ಕ್ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ. ಮ್ಯಾಗ್ನೆಟೈಸಿಂಗ್ ಪ್ರವಾಹವು ರೋಟರ್ ಶೂನ್ಯ ಫ್ಲಕ್ಸ್ ಲಿಂಕ್ನ ಮೌಲ್ಯವನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ ಮತ್ತು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ.
ವೇಗವನ್ನು ಸ್ಥಿರಗೊಳಿಸಿದಾಗ, ಕ್ವಾಡ್ರೇಚರ್ ಕರೆಂಟ್ ಸೆಟ್ಪಾಯಿಂಟ್ ಅನ್ನು ಪ್ರತ್ಯೇಕ PI ನಿಯಂತ್ರಕವನ್ನು ಬಳಸಿಕೊಂಡು ಉತ್ಪಾದಿಸಲಾಗುತ್ತದೆ, ಅದರ ಇನ್ಪುಟ್ ಅಪೇಕ್ಷಿತ ಮತ್ತು ಅಳತೆ ಮಾಡಿದ ಮೋಟಾರ್ ವೇಗದ ನಡುವಿನ ವ್ಯತ್ಯಾಸವಾಗಿದೆ. ಹೀಗಾಗಿ, ಸೆಟ್ ವೇಗವನ್ನು ನಿರ್ವಹಿಸಲು ಸಾಕಷ್ಟು ಯಾಂತ್ರಿಕ ಟಾರ್ಕ್ ಅನ್ನು ಒದಗಿಸಲು ಕ್ವಾಡ್ರೇಚರ್ ಕರೆಂಟ್ ಅನ್ನು ಯಾವಾಗಲೂ ಕನಿಷ್ಠ ಮಟ್ಟಕ್ಕೆ ಹೊಂದಿಸಲಾಗುತ್ತದೆ. ಆದ್ದರಿಂದ, ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣವು ಹೆಚ್ಚಿನ ಶಕ್ತಿ ದಕ್ಷತೆಯನ್ನು ಹೊಂದಿದೆ.
ಶಕ್ತಿಯ ಮೂಲಕ
ಸಲಕರಣೆಗಳ ಶಕ್ತಿಯು ಸರಿಸುಮಾರು ಒಂದೇ ಆಗಿದ್ದರೆ, ಗರಿಷ್ಠ ಲೋಡ್ನ ಶಕ್ತಿಯ ಪ್ರಕಾರ ಸಾಮರ್ಥ್ಯದೊಂದಿಗೆ ಅದೇ ಕಂಪನಿಯಿಂದ ಪರಿವರ್ತಕಗಳನ್ನು ಆಯ್ಕೆಮಾಡಿ. ಇದು ಪರಸ್ಪರ ಬದಲಾಯಿಸುವಿಕೆಯನ್ನು ಖಚಿತಪಡಿಸುತ್ತದೆ ಮತ್ತು ಸಲಕರಣೆಗಳ ನಿರ್ವಹಣೆಯನ್ನು ಸರಳಗೊಳಿಸುತ್ತದೆ. ಆಯ್ಕೆಮಾಡಿದ ಆವರ್ತನ ಪರಿವರ್ತಕದ ಸೇವಾ ಕೇಂದ್ರವು ನಿಮ್ಮ ನಗರದಲ್ಲಿದೆ ಎಂದು ಶಿಫಾರಸು ಮಾಡಲಾಗಿದೆ.
ಮುಖ್ಯ ವೋಲ್ಟೇಜ್ ಮೂಲಕ
ಯಾವಾಗಲೂ ಕೆಳಗೆ ಮತ್ತು ಮೇಲಕ್ಕೆ ವಿಶಾಲ ಸಂಭವನೀಯ ವೋಲ್ಟೇಜ್ ವ್ಯಾಪ್ತಿಯೊಂದಿಗೆ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆಮಾಡಿ. ವಾಸ್ತವವೆಂದರೆ ಸ್ಥಳೀಯ ನೆಟ್ವರ್ಕ್ಗಳಿಗೆ, ಸ್ಟ್ಯಾಂಡರ್ಡ್ ಎಂಬ ಪದವು ಕಣ್ಣೀರಿನ ಮೂಲಕ ಮಾತ್ರ ನಗುವನ್ನು ತರುತ್ತದೆ. ಕಡಿಮೆ ವೋಲ್ಟೇಜ್ ಹೆಚ್ಚಾಗಿ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ನಿಲ್ಲಿಸಲು ಕಾರಣವಾದರೆ, ಹೆಚ್ಚಿದ ವೋಲ್ಟೇಜ್ ಮುಖ್ಯ ಎಲೆಕ್ಟ್ರೋಲೈಟಿಕ್ ಕೆಪಾಸಿಟರ್ಗಳನ್ನು ಸ್ಫೋಟಿಸಲು ಮತ್ತು ಸಾಧನದ ಇನ್ಪುಟ್ ವಿಫಲಗೊಳ್ಳಲು ಕಾರಣವಾಗಬಹುದು.
ಆವರ್ತನ ಹೊಂದಾಣಿಕೆ ವ್ಯಾಪ್ತಿಯ ಮೂಲಕ

ನಿಯಂತ್ರಣ ಒಳಹರಿವಿನ ಸಂಖ್ಯೆಯಿಂದ
ಇನ್ಪುಟ್ ಕಂಟ್ರೋಲ್ ಕಮಾಂಡ್ಗಳಿಗೆ ಡಿಸ್ಕ್ರೀಟ್ ಇನ್ಪುಟ್ಗಳ ಅಗತ್ಯವಿದೆ (ಪ್ರಾರಂಭ, ನಿಲ್ಲಿಸು, ಹಿಮ್ಮುಖ, ನಿಲ್ಲಿಸು, ಇತ್ಯಾದಿ.). ಪ್ರತಿಕ್ರಿಯೆ ಸಂಕೇತಗಳಿಗೆ ಅನಲಾಗ್ ಒಳಹರಿವು ಅಗತ್ಯವಿದೆ (ಕಾರ್ಯಾಚರಣೆಯ ಸಮಯದಲ್ಲಿ ಡ್ರೈವ್ ಅನ್ನು ಹೊಂದಿಸುವುದು ಮತ್ತು ಹೊಂದಿಸುವುದು). ಡಿಜಿಟಲ್ ವೇಗ ಮತ್ತು ಸ್ಥಾನ ಸಂವೇದಕಗಳಿಂದ ಹೆಚ್ಚಿನ ಆವರ್ತನ ಸಂಕೇತಗಳನ್ನು ಇನ್ಪುಟ್ ಮಾಡಲು ಡಿಜಿಟಲ್ ಇನ್ಪುಟ್ಗಳು ಅಗತ್ಯವಿದೆ (ಎನ್ಕೋಡರ್ಗಳು) ಇನ್ಪುಟ್ಗಳ ಸಂಖ್ಯೆಯು ಎಂದಿಗೂ ದೊಡ್ಡದಾಗಿರುವುದಿಲ್ಲ, ಆದರೆ ಹೆಚ್ಚು ಒಳಹರಿವು, ಸಿಸ್ಟಮ್ ಅನ್ನು ಹೆಚ್ಚು ಸಂಕೀರ್ಣವಾಗಿ ನಿರ್ಮಿಸಬಹುದು ಮತ್ತು ಅದು ಹೆಚ್ಚು ದುಬಾರಿಯಾಗಿದೆ.
ಔಟ್ಪುಟ್ ಸಿಗ್ನಲ್ಗಳ ಸಂಖ್ಯೆಯಿಂದ
ವಿವಿಧ ಈವೆಂಟ್ಗಳಿಗೆ ಸಿಗ್ನಲ್ಗಳನ್ನು ಔಟ್ಪುಟ್ ಮಾಡಲು ಡಿಸ್ಕ್ರೀಟ್ ಔಟ್ಪುಟ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ (ಅಲಾರ್ಮ್, ಓವರ್ಹೀಟಿಂಗ್, ಇನ್ಪುಟ್ ವೋಲ್ಟೇಜ್ ಮಟ್ಟಕ್ಕಿಂತ ಅಥವಾ ಕೆಳಗಿನ, ದೋಷ ಸಂಕೇತ, ಇತ್ಯಾದಿ). ಸಂಕೀರ್ಣ ಪ್ರತಿಕ್ರಿಯೆ ವ್ಯವಸ್ಥೆಗಳನ್ನು ನಿರ್ಮಿಸಲು ಅನಲಾಗ್ ಔಟ್ಪುಟ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಆಯ್ಕೆ ಶಿಫಾರಸುಗಳು ಹಿಂದಿನ ಪ್ಯಾರಾಗ್ರಾಫ್ಗೆ ಹೋಲುತ್ತವೆ.
ಕಂಟ್ರೋಲ್ ಬಸ್
ನೀವು ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ನಿಯಂತ್ರಿಸುವ ಸಾಧನವು ಆಯ್ಕೆಮಾಡಿದ ಆವರ್ತನ ಪರಿವರ್ತಕದಂತೆಯೇ ಅದೇ ಬಸ್ ಮತ್ತು ಇನ್ಪುಟ್ಗಳು / ಔಟ್ಪುಟ್ಗಳ ಸಂಖ್ಯೆಯನ್ನು ಹೊಂದಿರಬೇಕು. ಭವಿಷ್ಯದ ನವೀಕರಣಗಳಿಗಾಗಿ ಇನ್ಪುಟ್ಗಳು ಮತ್ತು ಔಟ್ಪುಟ್ಗಳಿಗಾಗಿ ಸ್ವಲ್ಪ ಜಾಗವನ್ನು ಬಿಡಿ.
ಖಾತರಿ ಅಡಿಯಲ್ಲಿ
ವಾರಂಟಿ ಅವಧಿಯು ಆವರ್ತನ ಪರಿವರ್ತಕದ ವಿಶ್ವಾಸಾರ್ಹತೆಯನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡಲು ಪರೋಕ್ಷವಾಗಿ ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ. ನೈಸರ್ಗಿಕವಾಗಿ, ನೀವು ದೀರ್ಘಾವಧಿಯ ಯೋಜನೆಯೊಂದಿಗೆ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆ ಮಾಡಬೇಕು.ಕೆಲವು ತಯಾರಕರು ನಿರ್ದಿಷ್ಟವಾಗಿ ಖಾತರಿ ವ್ಯಾಪ್ತಿಗೆ ಒಳಪಡದ ಹಾನಿಯ ಪ್ರಕರಣಗಳಿಗೆ ಒದಗಿಸುತ್ತಾರೆ. ಯಾವಾಗಲೂ ದಸ್ತಾವೇಜನ್ನು ಎಚ್ಚರಿಕೆಯಿಂದ ಓದಿ ಮತ್ತು ಸಲಕರಣೆಗಳ ಮಾದರಿಗಳು ಮತ್ತು ತಯಾರಕರ ವಿಮರ್ಶೆಗಳಿಗಾಗಿ ಆನ್ಲೈನ್ನಲ್ಲಿ ಹುಡುಕಿ. ಸರಿಯಾದ ಆಯ್ಕೆ ಮಾಡಲು ಇದು ನಿಮಗೆ ಸಹಾಯ ಮಾಡುತ್ತದೆ. ಗುಣಮಟ್ಟದ ಸೇವೆ ಮತ್ತು ಸಿಬ್ಬಂದಿ ತರಬೇತಿಗಾಗಿ ಹಣವನ್ನು ಉಳಿಸಬೇಡಿ.
 ಸ್ಟ್ಯಾಂಡ್ನಲ್ಲಿ ಆವರ್ತನ ಪರಿವರ್ತಕ
ಸ್ಟ್ಯಾಂಡ್ನಲ್ಲಿ ಆವರ್ತನ ಪರಿವರ್ತಕ
ಓವರ್ಲೋಡ್ ಸಾಮರ್ಥ್ಯ
ಮೊದಲ ಅಂದಾಜಿನಂತೆ, ಆವರ್ತನ ಪರಿವರ್ತಕದ ಶಕ್ತಿಯನ್ನು ಮೋಟಾರ್ ಶಕ್ತಿಗಿಂತ 10-15% ಹೆಚ್ಚು ಆಯ್ಕೆ ಮಾಡಬೇಕು. ಪರಿವರ್ತಕದ ಪ್ರವಾಹವು ಮೋಟಾರಿನ ದರದ ಪ್ರವಾಹಕ್ಕಿಂತ ಹೆಚ್ಚಿನದಾಗಿರಬೇಕು ಮತ್ತು ಸಂಭವನೀಯ ಓವರ್ಲೋಡ್ಗಳ ಪ್ರಸ್ತುತಕ್ಕಿಂತ ಸ್ವಲ್ಪ ಹೆಚ್ಚಿನದಾಗಿರಬೇಕು.
ನಿರ್ದಿಷ್ಟ ಕಾರ್ಯವಿಧಾನದ ವಿವರಣೆಯಲ್ಲಿ, ಓವರ್ಲೋಡ್ ಪ್ರವಾಹಗಳು ಮತ್ತು ಅವುಗಳ ಹರಿವಿನ ಅವಧಿಯನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಸೂಚಿಸಲಾಗುತ್ತದೆ. ದಸ್ತಾವೇಜನ್ನು ಓದಿ! ಇದು ನಿಮಗೆ ಮನರಂಜನೆ ನೀಡುತ್ತದೆ ಮತ್ತು ಭವಿಷ್ಯದಲ್ಲಿ ಉಪಕರಣದ ಹಾನಿಯನ್ನು ತಡೆಯುತ್ತದೆ. ಡ್ರೈವ್ ಅನ್ನು ಆಘಾತ (ಪೀಕ್) ಲೋಡ್ಗಳಿಂದ (2-3 ಸೆಕೆಂಡುಗಳವರೆಗೆ ಲೋಡ್ಗಳು) ಸಹ ನಿರೂಪಿಸಿದರೆ, ನಂತರ ಗರಿಷ್ಠ ಪ್ರವಾಹಕ್ಕೆ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆ ಮಾಡುವುದು ಅವಶ್ಯಕ. ಮತ್ತೆ 10% ಮಾರ್ಜಿನ್ ತೆಗೆದುಕೊಳ್ಳಿ.
ಈ ವಿಷಯದ ಬಗ್ಗೆಯೂ ನೋಡಿ: ಪಂಪ್ ಘಟಕಗಳಿಗಾಗಿ VLT AQUA ಡ್ರೈವ್ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು