ವಿದ್ಯುತ್ ಮೋಟಾರುಗಳು ಮತ್ತು ಉತ್ಪಾದನಾ ಕಾರ್ಯವಿಧಾನಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು
 ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಅನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸುವಾಗ, ವಿದ್ಯುತ್ ಮೋಟರ್ ಅನ್ನು ಆಯ್ಕೆ ಮಾಡಬೇಕು ಆದ್ದರಿಂದ ಅದರ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು ಉತ್ಪಾದನಾ ಕಾರ್ಯವಿಧಾನದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತವೆ. ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು ಸ್ಥಿರ ಸ್ಥಿತಿಯಲ್ಲಿ ಅಸ್ಥಿರಗಳ ಸಂಬಂಧವನ್ನು ನೀಡುತ್ತವೆ.
ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಅನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸುವಾಗ, ವಿದ್ಯುತ್ ಮೋಟರ್ ಅನ್ನು ಆಯ್ಕೆ ಮಾಡಬೇಕು ಆದ್ದರಿಂದ ಅದರ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು ಉತ್ಪಾದನಾ ಕಾರ್ಯವಿಧಾನದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತವೆ. ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು ಸ್ಥಿರ ಸ್ಥಿತಿಯಲ್ಲಿ ಅಸ್ಥಿರಗಳ ಸಂಬಂಧವನ್ನು ನೀಡುತ್ತವೆ.
ಯಾಂತ್ರಿಕತೆಯ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣವನ್ನು ಕೋನೀಯ ವೇಗ ಮತ್ತು ಯಾಂತ್ರಿಕತೆಯ ಪ್ರತಿರೋಧದ ಕ್ಷಣದ ನಡುವಿನ ಸಂಬಂಧ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ, ಮೋಟಾರ್ ಶಾಫ್ಟ್ಗೆ ಕಡಿಮೆಯಾಗಿದೆ) ω = f (Mc).
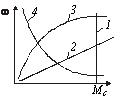
ಅಕ್ಕಿ. 1. ಕಾರ್ಯವಿಧಾನಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು
ಎಲ್ಲಾ ವೈವಿಧ್ಯತೆಗಳ ನಡುವೆ, ಕಾರ್ಯವಿಧಾನಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳ ಹಲವಾರು ವಿಶಿಷ್ಟ ಪ್ರಕಾರಗಳಿವೆ:
1. ವೇಗದ ಸ್ವತಂತ್ರ ಪ್ರತಿರೋಧದ ಕ್ಷಣದೊಂದಿಗೆ ಗುಣಲಕ್ಷಣ (ಅಂಜೂರ 1 ರಲ್ಲಿ ನೇರ ರೇಖೆ 1). ವೇಗ-ಸ್ವತಂತ್ರ ಯಾಂತ್ರಿಕ ಲಕ್ಷಣವನ್ನು ತಿರುಗುವಿಕೆಯ ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾಗಿ ನೇರ ರೇಖೆಯಂತೆ ಎಳೆಯಲಾಗುತ್ತದೆ, ಈ ಸಂದರ್ಭದಲ್ಲಿ ಲಂಬವಾಗಿರುತ್ತದೆ. ಅಂತಹ ಗುಣಲಕ್ಷಣವನ್ನು ಹೊಂದಿದೆ, ಉದಾಹರಣೆಗೆ, ಕ್ರೇನ್ಗಳು, ವಿಂಚ್ಗಳು, ಸ್ಥಿರ ವಿತರಣಾ ಎತ್ತರದೊಂದಿಗೆ ಪಿಸ್ಟನ್ ಪಂಪ್ಗಳು ಇತ್ಯಾದಿ.
2.ವೇಗದ ಮೇಲೆ ರೇಖಾತ್ಮಕವಾಗಿ ಅವಲಂಬಿತ ಪ್ರತಿರೋಧದ ಕ್ಷಣದೊಂದಿಗೆ ಒಂದು ಗುಣಲಕ್ಷಣ (ಚಿತ್ರ 1 ರಲ್ಲಿ ಸಾಲು 2). ಈ ಅವಲಂಬನೆಯು ಅಂತರ್ಗತವಾಗಿರುತ್ತದೆ, ಉದಾಹರಣೆಗೆ, ಸ್ಥಿರವಾದ ಲೋಡ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಸ್ವತಂತ್ರವಾಗಿ ಉತ್ಸುಕವಾಗಿರುವ DC ಜನರೇಟರ್ನ ಡ್ರೈವಿನಲ್ಲಿ.
3. ಟಾರ್ಕ್ನಲ್ಲಿ ರೇಖಾತ್ಮಕವಲ್ಲದ ಹೆಚ್ಚಳದೊಂದಿಗೆ ಗುಣಲಕ್ಷಣ (ಅಂಜೂರ 1 ರಲ್ಲಿ ಕರ್ವ್ 3). ವಿಶಿಷ್ಟ ಉದಾಹರಣೆಗಳೆಂದರೆ ಅಭಿಮಾನಿಗಳ ಕಾರ್ಯಾಚರಣೆ, ಕೇಂದ್ರಾಪಗಾಮಿ ಪಂಪ್ಗಳು, ಪ್ರೊಪೆಲ್ಲರ್ಗಳು. ಈ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ, ಕ್ಷಣ Mc ಕೋನೀಯ ವೇಗದ ವರ್ಗವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ ω... ಇದು ಕರೆಯಲ್ಪಡುವ ಪ್ಯಾರಾಬೋಲಿಕ್ (ಅಭಿಮಾನಿ) ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣ.
4. ಪ್ರತಿರೋಧದ ರೇಖಾತ್ಮಕವಾಗಿ ಕಡಿಮೆಯಾಗದ ಕ್ಷಣದೊಂದಿಗೆ ಗುಣಲಕ್ಷಣ (ಚಿತ್ರ 1 ರಲ್ಲಿ ಕರ್ವ್ 4). ಇಲ್ಲಿ, ಡ್ರ್ಯಾಗ್ ಕ್ಷಣವು ತಿರುಗುವಿಕೆಯ ವೇಗಕ್ಕೆ ವಿಲೋಮ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಯಾಂತ್ರಿಕತೆಯ ಸಂಪೂರ್ಣ ಕಾರ್ಯಾಚರಣಾ ವೇಗದ ವ್ಯಾಪ್ತಿಯಲ್ಲಿ ವಿದ್ಯುತ್ ಸ್ಥಿರವಾಗಿರುತ್ತದೆ. ಉದಾಹರಣೆಗೆ, ಕೆಲವು ಲೋಹ-ಕತ್ತರಿಸುವ ಯಂತ್ರಗಳ ಮುಖ್ಯ ಚಲನೆಯ ಕಾರ್ಯವಿಧಾನಗಳಲ್ಲಿ (ತಿರುಗುವಿಕೆ, ಮಿಲ್ಲಿಂಗ್, ಡ್ರಿಲ್ಲಿಂಗ್), ಕ್ಷಣ Mc ω ಗೆ ವಿಲೋಮ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ ಮತ್ತು ಯಾಂತ್ರಿಕತೆಯಿಂದ ಸೇವಿಸುವ ಶಕ್ತಿಯು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ.
ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಟಾರ್ಕ್ ωd = f (M) ಮೇಲೆ ಅದರ ಕೋನೀಯ ವೇಗದ ಅವಲಂಬನೆ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. ಮೋಟಾರು ಶಾಫ್ಟ್ನಲ್ಲಿ M ಕ್ಷಣ, ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕನ್ನು ಲೆಕ್ಕಿಸದೆ, ಧನಾತ್ಮಕ ಚಿಹ್ನೆಯನ್ನು ಹೊಂದಿದೆ - ಚಲನೆಯ ಕ್ಷಣ ಎಂದು ಇಲ್ಲಿ ಮನಸ್ಸಿನಲ್ಲಿಟ್ಟುಕೊಳ್ಳಬೇಕು. ಅದೇ ಸಮಯದಲ್ಲಿ, ಪ್ರತಿರೋಧದ ಕ್ಷಣ Mc ನಕಾರಾತ್ಮಕ ಚಿಹ್ನೆಯನ್ನು ಹೊಂದಿದೆ.
ಉದಾಹರಣೆಗಳಾಗಿ, ಅಂಜೂರ. 2 ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ತೋರಿಸುತ್ತದೆ: 1 - ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್; 2 - ಸ್ವತಂತ್ರ ಪ್ರಚೋದನೆಯೊಂದಿಗೆ ಡಿಸಿ ಮೋಟಾರ್; 3 - ಸರಣಿ ಪ್ರಚೋದನೆಯೊಂದಿಗೆ ಡಿಸಿ ಮೋಟಾರ್.
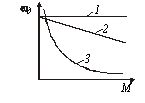 ಅಕ್ಕಿ. 2. ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು
ಅಕ್ಕಿ. 2. ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು
ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವಿನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡಲು, ವಿಶಿಷ್ಟ ಬಿಗಿತದ ಪರಿಕಲ್ಪನೆಯನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣದ ಬಿಗಿತವನ್ನು ಅಭಿವ್ಯಕ್ತಿಯಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ
β = dM / dω
ಅಲ್ಲಿ dM - ಎಂಜಿನ್ ಟಾರ್ಕ್ನಲ್ಲಿ ಬದಲಾವಣೆ; dωd - ಕೋನೀಯ ವೇಗದಲ್ಲಿ ಅನುಗುಣವಾದ ಬದಲಾವಣೆ.
ರೇಖೀಯ ಗುಣಲಕ್ಷಣಗಳಿಗಾಗಿ β ಮೌಲ್ಯವು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ, ರೇಖಾತ್ಮಕವಲ್ಲದವುಗಳಿಗೆ ಇದು ಆಪರೇಟಿಂಗ್ ಪಾಯಿಂಟ್ ಅನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ.
ಈ ಪರಿಕಲ್ಪನೆಯನ್ನು ಬಳಸಿಕೊಂಡು, ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಿರುವ ವೈಶಿಷ್ಟ್ಯಗಳು. 2, ಗುಣಾತ್ಮಕವಾಗಿ ಈ ಕೆಳಗಿನಂತೆ ಮೌಲ್ಯಮಾಪನ ಮಾಡಬಹುದು: 1 - ಸಂಪೂರ್ಣವಾಗಿ ಕಠಿಣ (β = ∞); 2 - ಘನ; 3 - ಮೃದು.
ಸಂಪೂರ್ಣವಾಗಿ ಕಷ್ಟಕರವಾದ ಗುಣಲಕ್ಷಣ - ಮೋಟಾರು ಲೋಡ್ ಶೂನ್ಯದಿಂದ ನಾಮಮಾತ್ರಕ್ಕೆ ಬದಲಾದಾಗ ಮೋಟಾರ್ ತಿರುಗುವಿಕೆಯ ವೇಗವು ಬದಲಾಗದೆ ಉಳಿಯುತ್ತದೆ. ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್ಗಳು ಈ ಗುಣಲಕ್ಷಣವನ್ನು ಹೊಂದಿವೆ.
ಕಟ್ಟುನಿಟ್ಟಾದ ಗುಣಲಕ್ಷಣ - ಲೋಡ್ ಶೂನ್ಯದಿಂದ ನಾಮಮಾತ್ರಕ್ಕೆ ಬದಲಾದಾಗ ತಿರುಗುವಿಕೆಯ ವೇಗವು ಸ್ವಲ್ಪ ಬದಲಾಗುತ್ತದೆ. ಈ ಗುಣಲಕ್ಷಣವು ಸಮಾನಾಂತರ-ಪ್ರಚೋದಿತ DC ಮೋಟಾರು ಮತ್ತು ಗುಣಲಕ್ಷಣದ ರೇಖೀಯ ಭಾಗದ ಪ್ರದೇಶದಲ್ಲಿ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನಿಂದ ಹೊಂದಿದೆ.
ಲೋಡ್ ಅನ್ನು ಶೂನ್ಯದಿಂದ ರೇಟ್ಗೆ ಬದಲಾಯಿಸಿದಾಗ ವೇಗದ ಬದಲಾವಣೆಯು ದರದ ವೇಗದ ಸರಿಸುಮಾರು 10% ಅನ್ನು ಮೀರದಿರುವಂತಹ ಕಠಿಣ ಗುಣಲಕ್ಷಣವನ್ನು ಪರಿಗಣಿಸಲಾಗುತ್ತದೆ.
ಮೃದುವಾದ ಗುಣಲಕ್ಷಣ - ಲೋಡ್ನಲ್ಲಿ ತುಲನಾತ್ಮಕವಾಗಿ ಸಣ್ಣ ಬದಲಾವಣೆಗಳೊಂದಿಗೆ ಮೋಟಾರ್ ವೇಗವು ಗಮನಾರ್ಹವಾಗಿ ಬದಲಾಗುತ್ತದೆ. ಈ ಗುಣಲಕ್ಷಣವು ಸರಣಿ, ಮಿಶ್ರ ಅಥವಾ ಸಮಾನಾಂತರ ಪ್ರಚೋದನೆಯೊಂದಿಗೆ ನೇರ ವಿದ್ಯುತ್ ಮೋಟರ್ ಅನ್ನು ಹೊಂದಿದೆ, ಆದರೆ ಆರ್ಮೇಚರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಹೆಚ್ಚುವರಿ ಪ್ರತಿರೋಧದೊಂದಿಗೆ, ಹಾಗೆಯೇ ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಪ್ರತಿರೋಧದೊಂದಿಗೆ ಅಸಮಕಾಲಿಕವಾಗಿರುತ್ತದೆ.
ಹೆಚ್ಚಿನ ಉತ್ಪಾದನಾ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ, ಅಸಮಕಾಲಿಕ ಅಳಿಲು-ಕೇಜ್ ಮೋಟರ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಇದು ಕಟ್ಟುನಿಟ್ಟಾದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೊಂದಿರುತ್ತದೆ.
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ಗಳ ಎಲ್ಲಾ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ನೈಸರ್ಗಿಕ ಮತ್ತು ಕೃತಕವಾಗಿ ವಿಂಗಡಿಸಲಾಗಿದೆ.
ನೈಸರ್ಗಿಕ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು ನಿಯತಾಂಕಗಳ ನಾಮಮಾತ್ರ ಮೌಲ್ಯಗಳೊಂದಿಗೆ ಎಂಜಿನ್ನ ಕಾರ್ಯಾಚರಣೆಯ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಸೂಚಿಸುತ್ತದೆ.
ಉದಾಹರಣೆಗೆ, ಸಮಾನಾಂತರ-ಪ್ರಚೋದಿತ ಮೋಟರ್ಗಾಗಿ, ಆರ್ಮೇಚರ್ ವೋಲ್ಟೇಜ್ ಮತ್ತು ಪ್ರಚೋದನೆಯ ಪ್ರವಾಹವು ನಾಮಮಾತ್ರ ಮೌಲ್ಯಗಳನ್ನು ಹೊಂದಿರುವ ಸಂದರ್ಭದಲ್ಲಿ ಮತ್ತು ಆರ್ಮೇಚರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಯಾವುದೇ ಹೆಚ್ಚುವರಿ ಪ್ರತಿರೋಧವಿಲ್ಲದಿದ್ದಲ್ಲಿ ನೈಸರ್ಗಿಕ ಗುಣಲಕ್ಷಣವನ್ನು ರೂಪಿಸಬಹುದು.
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ನೈಸರ್ಗಿಕ ಗುಣಲಕ್ಷಣವು ಮೋಟಾರ್ ಸ್ಟೇಟರ್ಗೆ ಸರಬರಾಜು ಮಾಡಲಾದ ಪರ್ಯಾಯ ವಿದ್ಯುತ್ ಪ್ರವಾಹದ ದರದ ವೋಲ್ಟೇಜ್ ಮತ್ತು ದರದ ಆವರ್ತನಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ, ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಯಾವುದೇ ಹೆಚ್ಚುವರಿ ಪ್ರತಿರೋಧವಿಲ್ಲ ಎಂದು ಒದಗಿಸಲಾಗಿದೆ.
ಹೀಗಾಗಿ, ಪ್ರತಿ ಎಂಜಿನ್ಗೆ, ಕೇವಲ ಒಂದು ನೈಸರ್ಗಿಕ ಗುಣಲಕ್ಷಣವನ್ನು ನಿರ್ಮಿಸಬಹುದು ಮತ್ತು ಅನಿಯಮಿತ ಸಂಖ್ಯೆಯ ಕೃತಕ ಪದಗಳಿಗಿಂತ. ಉದಾಹರಣೆಗೆ, ಡಿಸಿ ಮೋಟರ್ನ ಆರ್ಮೇಚರ್ ಪ್ರತಿರೋಧದ ಪ್ರತಿ ಹೊಸ ಮೌಲ್ಯ ಅಥವಾ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ತನ್ನದೇ ಆದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೊಂದಿದೆ.
