ಶಕ್ತಿಯನ್ನು ಉಳಿಸುವ ಸಾಧನವಾಗಿ ವೇರಿಯಬಲ್ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್
 ಅನಿಯಂತ್ರಿತ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ನಿಂದ ನಿಯಂತ್ರಿತಕ್ಕೆ ಪರಿವರ್ತನೆಯು ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವಿನಲ್ಲಿ ಮತ್ತು ತಾಂತ್ರಿಕ ಕ್ಷೇತ್ರದಲ್ಲಿ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಮೂಲಕ ಶಕ್ತಿಯನ್ನು ಉಳಿಸುವ ಮುಖ್ಯ ಮಾರ್ಗಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ.
ಅನಿಯಂತ್ರಿತ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ನಿಂದ ನಿಯಂತ್ರಿತಕ್ಕೆ ಪರಿವರ್ತನೆಯು ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವಿನಲ್ಲಿ ಮತ್ತು ತಾಂತ್ರಿಕ ಕ್ಷೇತ್ರದಲ್ಲಿ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಮೂಲಕ ಶಕ್ತಿಯನ್ನು ಉಳಿಸುವ ಮುಖ್ಯ ಮಾರ್ಗಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ.
ನಿಯಮದಂತೆ, ಉತ್ಪಾದನಾ ಕಾರ್ಯವಿಧಾನಗಳ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ಗಳ ವೇಗ ಅಥವಾ ಟಾರ್ಕ್ ಅನ್ನು ನಿಯಂತ್ರಿಸುವ ಅಗತ್ಯವನ್ನು ತಾಂತ್ರಿಕ ಪ್ರಕ್ರಿಯೆಯ ಅವಶ್ಯಕತೆಗಳಿಂದ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ. ಉದಾಹರಣೆಗೆ, ಕಟ್ಟರ್ನ ಫೀಡ್ ದರವು ಲ್ಯಾಥ್ನಲ್ಲಿ ವರ್ಕ್ಪೀಸ್ ಅನ್ನು ಸಂಸ್ಕರಿಸುವ ಶುಚಿತ್ವವನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ, ನಿಲ್ಲಿಸುವ ಮೊದಲು ಕಾರಿನ ನಿಖರವಾದ ಸ್ಥಾನಕ್ಕಾಗಿ ಎಲಿವೇಟರ್ ವೇಗವನ್ನು ಕಡಿಮೆ ಮಾಡುವುದು ಅವಶ್ಯಕ, ಅಂಕುಡೊಂಕಾದ ಶಾಫ್ಟ್ನ ಟಾರ್ಕ್ ಅನ್ನು ಹೊಂದಿಸುವ ಅಗತ್ಯವನ್ನು ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ ಗಾಯಗೊಂಡ ವಸ್ತುವಿನ ಒತ್ತಡದ ನಿರಂತರ ಶಕ್ತಿಯನ್ನು ಕಾಪಾಡಿಕೊಳ್ಳುವ ಪರಿಸ್ಥಿತಿಗಳು, ಇತ್ಯಾದಿ.
ಆದಾಗ್ಯೂ, ತಾಂತ್ರಿಕ ಪರಿಸ್ಥಿತಿಗಳಿಗೆ ಅನುಗುಣವಾಗಿ ವೇಗದಲ್ಲಿ ಬದಲಾವಣೆಯ ಅಗತ್ಯವಿಲ್ಲದ ಹಲವಾರು ಕಾರ್ಯವಿಧಾನಗಳಿವೆ, ಅಥವಾ ತಾಂತ್ರಿಕ ಪ್ರಕ್ರಿಯೆಯ ನಿಯತಾಂಕಗಳ ಮೇಲೆ ಪ್ರಭಾವ ಬೀರುವ ಇತರ (ವಿದ್ಯುತ್ ಅಲ್ಲದ) ವಿಧಾನಗಳನ್ನು ನಿಯಂತ್ರಣಕ್ಕಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
ಮೊದಲನೆಯದಾಗಿ, ಅವು ಘನ, ದ್ರವ ಮತ್ತು ಅನಿಲ ಉತ್ಪನ್ನಗಳನ್ನು ಚಲಿಸಲು ನಿರಂತರ ಸಾರಿಗೆ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಒಳಗೊಂಡಿವೆ: ಕನ್ವೇಯರ್ಗಳು, ಅಭಿಮಾನಿಗಳು, ಅಭಿಮಾನಿಗಳು, ಪಂಪ್ ಘಟಕಗಳು. ಈ ಕಾರ್ಯವಿಧಾನಗಳಿಗಾಗಿ, ಪ್ರಸ್ತುತ, ನಿಯಮದಂತೆ, ಅನಿಯಂತ್ರಿತ ಅಸಮಕಾಲಿಕ ವಿದ್ಯುತ್ ಡ್ರೈವ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಇದು ಕಾರ್ಯವಿಧಾನಗಳ ಮೇಲಿನ ಹೊರೆಯನ್ನು ಲೆಕ್ಕಿಸದೆಯೇ ಕೆಲಸ ಮಾಡುವ ಕಾಯಗಳನ್ನು ಸ್ಥಿರ ವೇಗದಲ್ಲಿ ಚಲನೆಯಲ್ಲಿ ಹೊಂದಿಸುತ್ತದೆ. ಅದರ ಭಾಗಶಃ ಲೋಡ್ ಅಡಿಯಲ್ಲಿ, ನಿರಂತರ ವೇಗದಲ್ಲಿ ಕಾರ್ಯಾಚರಣಾ ವಿಧಾನಗಳು ಹೆಚ್ಚಿದ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೊಂದಿವೆ ನಿರ್ದಿಷ್ಟ ಶಕ್ತಿಯ ಬಳಕೆ ನಾಮಮಾತ್ರದ ಕ್ರಮಕ್ಕೆ ಹೋಲಿಸಿದರೆ.
NSC ಕಾರ್ಯಕ್ಷಮತೆಯ ಕಡಿತ, ಕನ್ವೇಯರ್ನ ದಕ್ಷತೆಯು ಕಡಿಮೆಯಾಗುತ್ತದೆ, ಏಕೆಂದರೆ ಸೇವಿಸುವ ಶಕ್ತಿಯ ಸಾಪೇಕ್ಷ ಪಾಲು ನಿಷ್ಕ್ರಿಯ ಕ್ಷಣವನ್ನು ಮೀರಿಸುತ್ತದೆ. ಹೆಚ್ಚು ಆರ್ಥಿಕತೆಯು ವೇರಿಯಬಲ್ ಸ್ಪೀಡ್ ಮೋಡ್ ಆಗಿದೆ, ಇದು ಅದೇ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಒದಗಿಸುತ್ತದೆ, ಆದರೆ ಎಳೆಯುವ ಪ್ರಯತ್ನದ ನಿರಂತರ ಅಂಶದೊಂದಿಗೆ.
ಅಂಜೂರದಲ್ಲಿ. ಐಡಲ್ ಕ್ಷಣ Mx = 0, ЗМв ಸ್ಥಿರ (v - const) ಮತ್ತು ಹೊಂದಾಣಿಕೆಯ (Fg = const) ಲೋಡ್ಗಳ ಚಲನೆಯ ವೇಗದೊಂದಿಗೆ ಕನ್ವೇಯರ್ಗಾಗಿ ಮೋಟಾರ್ ಶಾಫ್ಟ್ನ ವಿದ್ಯುತ್ ಅವಲಂಬನೆಗಳನ್ನು 1 ತೋರಿಸುತ್ತದೆ. ಚಿತ್ರದಲ್ಲಿನ ಮಬ್ಬಾದ ಪ್ರದೇಶವು ವೇಗ ನಿಯಂತ್ರಣದಿಂದ ಪಡೆದ ಶಕ್ತಿಯ ಉಳಿತಾಯವನ್ನು ಪ್ರತಿನಿಧಿಸುತ್ತದೆ.
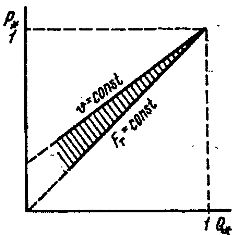
ಅಕ್ಕಿ. 1. ಕನ್ವೇಯರ್ನ ಕಾರ್ಯಕ್ಷಮತೆಯ ಮೇಲೆ ವಿದ್ಯುತ್ ಮೋಟರ್ ಶಾಫ್ಟ್ನ ಶಕ್ತಿಯ ಅವಲಂಬನೆ
ಆದ್ದರಿಂದ ಕನ್ವೇಯರ್ ವೇಗವು ನಾಮಮಾತ್ರದ ಮೌಲ್ಯದ 60% ಗೆ ಕಡಿಮೆಯಾದರೆ, ನಾಮಮಾತ್ರ ಮೌಲ್ಯಕ್ಕೆ ಹೋಲಿಸಿದರೆ ಮೋಟಾರ್ ಶಾಫ್ಟ್ ಶಕ್ತಿಯು 10% ರಷ್ಟು ಕಡಿಮೆಯಾಗುತ್ತದೆ. ವೇಗ ನಿಯಂತ್ರಣದ ಪರಿಣಾಮವು ಹೆಚ್ಚಾಗಿರುತ್ತದೆ, ಹೆಚ್ಚಿನ ಐಡಲ್ ಟಾರ್ಕ್, ಮತ್ತು ಹೆಚ್ಚು ಗಮನಾರ್ಹವಾಗಿ ಇದು ಕನ್ವೇಯರ್ನ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ.
ಅಂಡರ್ಲೋಡಿಂಗ್ನೊಂದಿಗೆ ನಿರಂತರ ಸಾರಿಗೆ ಕಾರ್ಯವಿಧಾನಗಳ ವೇಗವನ್ನು ಕಡಿಮೆ ಮಾಡುವುದರಿಂದ ಕಡಿಮೆ ನಿರ್ದಿಷ್ಟ ಶಕ್ತಿಯ ಬಳಕೆಯೊಂದಿಗೆ ಅಗತ್ಯವಾದ ಪ್ರಮಾಣದ ಕೆಲಸವನ್ನು ನಿರ್ವಹಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ, ಅಂದರೆ ಚಲಿಸುವ ಉತ್ಪನ್ನಗಳ ತಾಂತ್ರಿಕ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಶಕ್ತಿಯ ಬಳಕೆಯನ್ನು ಕಡಿಮೆ ಮಾಡುವ ಸಂಪೂರ್ಣ ಆರ್ಥಿಕ ಸಮಸ್ಯೆಯನ್ನು ಪರಿಹರಿಸಲು.
ಸಾಮಾನ್ಯವಾಗಿ, ಅಂತಹ ಕಾರ್ಯವಿಧಾನಗಳ ವೇಗದಲ್ಲಿ ಕಡಿತದೊಂದಿಗೆ, ತಾಂತ್ರಿಕ ಉಪಕರಣಗಳ ಕಾರ್ಯಾಚರಣೆಯ ಗುಣಲಕ್ಷಣಗಳ ಸುಧಾರಣೆಯಿಂದಾಗಿ ಆರ್ಥಿಕ ಪರಿಣಾಮವೂ ಕಾಣಿಸಿಕೊಳ್ಳುತ್ತದೆ. ಆದ್ದರಿಂದ, ವೇಗ ಕಡಿಮೆಯಾದಾಗ, ಕನ್ವೇಯರ್ ದೇಹದ ಉಡುಗೆ ಕಡಿಮೆಯಾಗುತ್ತದೆ, ದ್ರವ ಮತ್ತು ಅನಿಲಗಳನ್ನು ಪೂರೈಸಲು ಯಂತ್ರಗಳು ಅಭಿವೃದ್ಧಿಪಡಿಸಿದ ಒತ್ತಡದಲ್ಲಿನ ಇಳಿಕೆಯಿಂದಾಗಿ ಪೈಪ್ಲೈನ್ಗಳು ಮತ್ತು ಫಿಟ್ಟಿಂಗ್ಗಳ ಸೇವಾ ಜೀವನವು ಹೆಚ್ಚಾಗುತ್ತದೆ ಮತ್ತು ಈ ಉತ್ಪನ್ನಗಳ ಹೆಚ್ಚುವರಿ ಬಳಕೆಯನ್ನು ಸಹ ತೆಗೆದುಹಾಕಲಾಗುತ್ತದೆ.
ತಂತ್ರಜ್ಞಾನದ ಕ್ಷೇತ್ರದಲ್ಲಿನ ಪರಿಣಾಮವು ಶಕ್ತಿಯ ಉಳಿತಾಯಕ್ಕಿಂತ ಹೆಚ್ಚಾಗಿ ಗಮನಾರ್ಹವಾಗಿ ಹೆಚ್ಚಾಗುತ್ತದೆ, ಅದಕ್ಕಾಗಿಯೇ ಶಕ್ತಿಯ ಅಂಶವನ್ನು ಮಾತ್ರ ಮೌಲ್ಯಮಾಪನ ಮಾಡುವ ಮೂಲಕ ಅಂತಹ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ ನಿಯಂತ್ರಿತ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಅನ್ನು ಬಳಸುವ ಸಲಹೆಯನ್ನು ನಿರ್ಧರಿಸುವುದು ಮೂಲಭೂತವಾಗಿ ತಪ್ಪು.
ಸಲಿಕೆ ಯಂತ್ರಗಳ ವೇಗ ನಿಯಂತ್ರಣ.
ದ್ರವಗಳು ಮತ್ತು ಅನಿಲಗಳ ಪೂರೈಕೆಗಾಗಿ ಕೇಂದ್ರಾಪಗಾಮಿ ಕಾರ್ಯವಿಧಾನಗಳು (ಅಭಿಮಾನಿಗಳು, ಪಂಪ್ಗಳು, ಫ್ಯಾನ್ಗಳು, ಕಂಪ್ರೆಸರ್ಗಳು) ನಿರ್ದಿಷ್ಟ ಶಕ್ತಿಯ ಬಳಕೆಯನ್ನು ಗಮನಾರ್ಹವಾಗಿ ಕಡಿಮೆ ಮಾಡಲು ದೇಶದಾದ್ಯಂತ ಹೆಚ್ಚಿನ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿರುವ ಮುಖ್ಯ ಸಾಮಾನ್ಯ ಕೈಗಾರಿಕಾ ಕಾರ್ಯವಿಧಾನಗಳಾಗಿವೆ. ಕೇಂದ್ರಾಪಗಾಮಿ ಕಾರ್ಯವಿಧಾನಗಳ ವಿಶೇಷ ಸ್ಥಾನವನ್ನು ಅವುಗಳ ಬೃಹತ್ತೆ, ಹೆಚ್ಚಿನ ಶಕ್ತಿ, ನಿಯಮದಂತೆ, ದೀರ್ಘ ಆಪರೇಟಿಂಗ್ ಮೋಡ್ನೊಂದಿಗೆ ವಿವರಿಸಲಾಗಿದೆ.
ಈ ಸಂದರ್ಭಗಳು ದೇಶದ ಶಕ್ತಿಯ ಸಮತೋಲನದಲ್ಲಿ ಈ ಕಾರ್ಯವಿಧಾನಗಳ ಗಮನಾರ್ಹ ಪಾಲನ್ನು ನಿರ್ಧರಿಸುತ್ತವೆ.ಪಂಪ್ಗಳು, ಫ್ಯಾನ್ಗಳು ಮತ್ತು ಕಂಪ್ರೆಸರ್ಗಳಿಗಾಗಿ ಡ್ರೈವ್ ಮೋಟಾರ್ಗಳ ಒಟ್ಟು ಸ್ಥಾಪಿತ ಸಾಮರ್ಥ್ಯವು ಎಲ್ಲಾ ವಿದ್ಯುತ್ ಸ್ಥಾವರಗಳ ಸಾಮರ್ಥ್ಯದ ಸುಮಾರು 20% ಆಗಿದೆ, ಆದರೆ ಅಭಿಮಾನಿಗಳು ಮಾತ್ರ ದೇಶದಲ್ಲಿ ಉತ್ಪಾದಿಸುವ ಎಲ್ಲಾ ವಿದ್ಯುತ್ನ ಸುಮಾರು 10% ಅನ್ನು ಬಳಸುತ್ತಾರೆ.
ಕೇಂದ್ರಾಪಗಾಮಿ ಕಾರ್ಯವಿಧಾನಗಳ ಕಾರ್ಯಾಚರಣಾ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹರಿವಿನ ದರ Q ಮೇಲೆ ಹೆಡ್ H ಮತ್ತು ಹರಿವಿನ ಪ್ರಮಾಣ Q ಮೇಲೆ ವಿದ್ಯುತ್ P ಅವಲಂಬನೆಗಳ ರೂಪದಲ್ಲಿ ಪ್ರಸ್ತುತಪಡಿಸಲಾಗುತ್ತದೆ. ಸ್ಥಾಯಿ ಕಾರ್ಯಾಚರಣೆಯ ಕ್ರಮದಲ್ಲಿ, ಕೇಂದ್ರಾಪಗಾಮಿ ಕಾರ್ಯವಿಧಾನದಿಂದ ರಚಿಸಲಾದ ತಲೆಯು ಸಮತೋಲನಗೊಳ್ಳುತ್ತದೆ ಹೈಡ್ರೋ- ಅಥವಾ ಏರೋಡೈನಾಮಿಕ್ ನೆಟ್ವರ್ಕ್ನ ಒತ್ತಡವು ದ್ರವ ಅಥವಾ ಅನಿಲವನ್ನು ನೀಡುತ್ತದೆ.
ಒತ್ತಡದ ಸ್ಥಿರ ಅಂಶವನ್ನು ಪಂಪ್ಗಳಿಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ - ಬಳಕೆದಾರ ಮತ್ತು ಪಂಪ್ನ ಮಟ್ಟಗಳ ನಡುವಿನ ಜಿಯೋಡೆಸಿಕ್ ವ್ಯತ್ಯಾಸದಿಂದ; ಅಭಿಮಾನಿಗಳಿಗೆ - ನೈಸರ್ಗಿಕ ಆಕರ್ಷಣೆ; ಅಭಿಮಾನಿಗಳು ಮತ್ತು ಸಂಕೋಚಕಗಳಿಗೆ - ನೆಟ್ವರ್ಕ್ನಲ್ಲಿ (ಜಲಾಶಯ) ಸಂಕುಚಿತ ಅನಿಲ ಒತ್ತಡದಿಂದ.
ಪಂಪ್ ಮತ್ತು ನೆಟ್ವರ್ಕ್ನ Q-H- ಗುಣಲಕ್ಷಣಗಳ ಛೇದನದ ಬಿಂದುವು H-Hn ಮತ್ತು Q - Qn ನಿಯತಾಂಕಗಳನ್ನು ನಿರ್ಧರಿಸುತ್ತದೆ. ಸ್ಥಿರ ವೇಗದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಪಂಪ್ನ ಹರಿವಿನ ದರ Q ಯ ನಿಯಂತ್ರಣವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಔಟ್ಲೆಟ್ನಲ್ಲಿನ ಕವಾಟದಿಂದ ನಡೆಸಲಾಗುತ್ತದೆ ಮತ್ತು ನೆಟ್ವರ್ಕ್ನ ಗುಣಲಕ್ಷಣದಲ್ಲಿ ಬದಲಾವಣೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಹರಿವಿನ ಪ್ರಮಾಣ QA * <1 ಅನುರೂಪವಾಗಿದೆ ಪಂಪ್ನ ಗುಣಲಕ್ಷಣದೊಂದಿಗೆ ಛೇದನದ ಬಿಂದು.
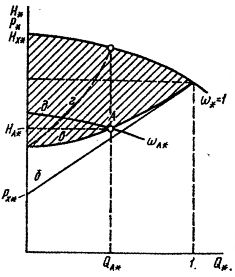
ಅಕ್ಕಿ. 2. ಪಂಪಿಂಗ್ ಘಟಕದ Q-H- ಗುಣಲಕ್ಷಣಗಳು
ಎಲೆಕ್ಟ್ರಿಕಲ್ ಸರ್ಕ್ಯೂಟ್ಗಳೊಂದಿಗೆ ಸಾದೃಶ್ಯದ ಮೂಲಕ, ಕವಾಟದ ಮೂಲಕ ಹರಿವನ್ನು ನಿಯಂತ್ರಿಸುವುದು ಸರ್ಕ್ಯೂಟ್ನ ವಿದ್ಯುತ್ ಪ್ರತಿರೋಧವನ್ನು ಹೆಚ್ಚಿಸುವ ಮೂಲಕ ಪ್ರಸ್ತುತವನ್ನು ನಿಯಂತ್ರಿಸುವಂತೆಯೇ ಇರುತ್ತದೆ. ನಿಸ್ಸಂಶಯವಾಗಿ, ಈ ನಿಯಂತ್ರಣ ವಿಧಾನವು ಶಕ್ತಿಯ ದೃಷ್ಟಿಕೋನದಿಂದ ಪರಿಣಾಮಕಾರಿಯಾಗಿರುವುದಿಲ್ಲ, ಏಕೆಂದರೆ ಇದು ನಿಯಂತ್ರಿಸುವ ಅಂಶಗಳಲ್ಲಿ (ರೆಸಿಸ್ಟರ್, ವಾಲ್ವ್) ಅನುತ್ಪಾದಕ ಶಕ್ತಿಯ ನಷ್ಟಗಳೊಂದಿಗೆ ಇರುತ್ತದೆ. ಕವಾಟದ ನಷ್ಟವನ್ನು ಅಂಜೂರದಲ್ಲಿ ಮಬ್ಬಾದ ಪ್ರದೇಶದಿಂದ ನಿರೂಪಿಸಲಾಗಿದೆ. 1.
ಎಲೆಕ್ಟ್ರಿಕಲ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿರುವಂತೆ, ಅದರ ಬಳಕೆದಾರರಿಗಿಂತ ಶಕ್ತಿಯ ಮೂಲವನ್ನು ನಿಯಂತ್ರಿಸಲು ಇದು ಹೆಚ್ಚು ಆರ್ಥಿಕವಾಗಿರುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಮೂಲ ವೋಲ್ಟೇಜ್ನಲ್ಲಿನ ಇಳಿಕೆಯಿಂದಾಗಿ ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ಗಳಲ್ಲಿ ಲೋಡ್ ಪ್ರವಾಹವು ಕಡಿಮೆಯಾಗುತ್ತದೆ. ಹೈಡ್ರಾಲಿಕ್ ಮತ್ತು ಏರೋಡೈನಾಮಿಕ್ ನೆಟ್ವರ್ಕ್ಗಳಲ್ಲಿ, ಯಾಂತ್ರಿಕತೆಯಿಂದ ರಚಿಸಲಾದ ಒತ್ತಡವನ್ನು ಕಡಿಮೆ ಮಾಡುವ ಮೂಲಕ ಇದೇ ರೀತಿಯ ಪರಿಣಾಮವನ್ನು ಪಡೆಯಲಾಗುತ್ತದೆ, ಇದು ಅದರ ಪ್ರಚೋದಕದ ವೇಗವನ್ನು ಕಡಿಮೆ ಮಾಡುವ ಮೂಲಕ ಅರಿತುಕೊಳ್ಳುತ್ತದೆ.
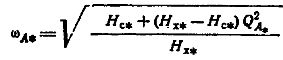
ವೇಗವು ಬದಲಾದಾಗ, ಕೇಂದ್ರಾಪಗಾಮಿ ಕಾರ್ಯವಿಧಾನಗಳ ಕಾರ್ಯಾಚರಣಾ ಗುಣಲಕ್ಷಣಗಳು ಹೋಲಿಕೆಯ ನಿಯಮಗಳಿಗೆ ಅನುಗುಣವಾಗಿ ಬದಲಾಗುತ್ತವೆ, ಇದು ರೂಪವನ್ನು ಹೊಂದಿರುತ್ತದೆ: Q * = ω *, H * = ω *2, P * = ω *3
ಪಂಪ್ ಇಂಪೆಲ್ಲರ್ ವೇಗವು ಅದರ ವಿಶಿಷ್ಟತೆಯು ಪಾಯಿಂಟ್ A ಮೂಲಕ ಹಾದುಹೋಗುತ್ತದೆ:
ವೇಗ ನಿಯಂತ್ರಣದ ಸಮಯದಲ್ಲಿ ಪಂಪ್ ಸೇವಿಸುವ ಶಕ್ತಿಯ ಅಭಿವ್ಯಕ್ತಿ:

ವೇಗದ ಮೇಲಿನ ಕ್ಷಣದ ಚತುರ್ಭುಜ ಅವಲಂಬನೆಯು ಮುಖ್ಯವಾಗಿ ಅಭಿಮಾನಿಗಳಿಗೆ ವಿಶಿಷ್ಟವಾಗಿದೆ, ಏಕೆಂದರೆ ನೈಸರ್ಗಿಕ ಒತ್ತಡದಿಂದ ನಿರ್ಧರಿಸಲ್ಪಟ್ಟ ತಲೆಯ ಸ್ಥಿರ ಅಂಶವು Hx ಗಿಂತ ಗಮನಾರ್ಹವಾಗಿ ಚಿಕ್ಕದಾಗಿದೆ. ತಾಂತ್ರಿಕ ಸಾಹಿತ್ಯದಲ್ಲಿ, ವೇಗದ ಮೇಲಿನ ಕ್ಷಣದ ಅಂದಾಜು ಅವಲಂಬನೆಯನ್ನು ಕೆಲವೊಮ್ಮೆ ಬಳಸಲಾಗುತ್ತದೆ, ಇದು ಕೇಂದ್ರಾಪಗಾಮಿ ಕಾರ್ಯವಿಧಾನದ ಈ ಆಸ್ತಿಯನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ:
M* = ω *n
ಇಲ್ಲಿ n = 2 at Hc = 0 ಮತ್ತು nHc> 0. ಲೆಕ್ಕಾಚಾರಗಳು ಮತ್ತು ಪ್ರಯೋಗಗಳು n=2 — 5 ಎಂದು ತೋರಿಸುತ್ತವೆ, ಮತ್ತು ಅದರ ದೊಡ್ಡ ಮೌಲ್ಯಗಳು ಗಮನಾರ್ಹವಾದ ಹಿಮ್ಮುಖ ಒತ್ತಡದೊಂದಿಗೆ ನೆಟ್ವರ್ಕ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಸಂಕೋಚಕಗಳ ಲಕ್ಷಣಗಳಾಗಿವೆ.
ಸ್ಥಿರ ಮತ್ತು ವೇರಿಯಬಲ್ ವೇಗದಲ್ಲಿ ಪಂಪ್ ಆಪರೇಟಿಂಗ್ ಮೋಡ್ಗಳ ವಿಶ್ಲೇಷಣೆಯು ω= const ನಲ್ಲಿ ಹೆಚ್ಚುವರಿ ಶಕ್ತಿಯ ಬಳಕೆ ಬಹಳ ಮಹತ್ವದ್ದಾಗಿದೆ ಎಂದು ತೋರಿಸುತ್ತದೆ. ಉದಾಹರಣೆಗೆ, ನಿಯತಾಂಕಗಳೊಂದಿಗೆ ಪಂಪ್ನ ಆಪರೇಟಿಂಗ್ ಮೋಡ್ಗಳ ಲೆಕ್ಕಾಚಾರದ ಫಲಿತಾಂಶಗಳನ್ನು Hx * = 1.2 ಕೆಳಗೆ ತೋರಿಸಲಾಗಿದೆ; ವಿಭಿನ್ನ ಬೆನ್ನಿನ ಒತ್ತಡ ಹೊಂದಿರುವ ನೆಟ್ವರ್ಕ್ನಲ್ಲಿ Px*= 0.3 Зс:
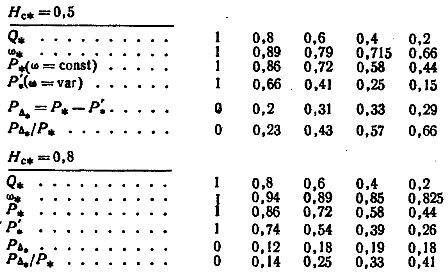
ನಿಯಂತ್ರಿತ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಸೇವಿಸುವ ವಿದ್ಯುಚ್ಛಕ್ತಿಯ ಬಳಕೆಯನ್ನು ಗಣನೀಯವಾಗಿ ಕಡಿಮೆ ಮಾಡುತ್ತದೆ ಎಂದು ನೀಡಿದ ಡೇಟಾ ತೋರಿಸುತ್ತದೆ: ಮೊದಲ ಪ್ರಕರಣದಲ್ಲಿ 66% ಮತ್ತು ಎರಡನೇ ಪ್ರಕರಣದಲ್ಲಿ 41% ವರೆಗೆ. ಪ್ರಾಯೋಗಿಕವಾಗಿ, ಈ ಪರಿಣಾಮವು ಇನ್ನೂ ಹೆಚ್ಚಿನದಾಗಿರುತ್ತದೆ, ಏಕೆಂದರೆ ವಿವಿಧ ಕಾರಣಗಳಿಗಾಗಿ (ಅನುಪಸ್ಥಿತಿ ಅಥವಾ ಕವಾಟಗಳ ಅಸಮರ್ಪಕ ಕಾರ್ಯ, ಹಸ್ತಚಾಲಿತ ಕಾರ್ಯನಿರ್ವಹಣೆ), ಕವಾಟಗಳ ನಿಯಂತ್ರಣವನ್ನು ಅನ್ವಯಿಸುವುದಿಲ್ಲ, ಇದು ವಿದ್ಯುತ್ ಬಳಕೆಯಲ್ಲಿ ಹೆಚ್ಚಳಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ, ಆದರೆ ಹೈಡ್ರಾಲಿಕ್ ನೆಟ್ವರ್ಕ್ನಲ್ಲಿ ಅತಿಯಾದ ಪ್ರಯತ್ನಗಳು ಮತ್ತು ವೆಚ್ಚಗಳಿಗೆ.
ಸ್ಥಿರವಾದ ನಿಯತಾಂಕಗಳೊಂದಿಗೆ ನೆಟ್ವರ್ಕ್ನಲ್ಲಿ ಏಕ-ನಟನಾ ಕೇಂದ್ರಾಪಗಾಮಿ ಕಾರ್ಯವಿಧಾನಗಳ ಶಕ್ತಿ ಸಮಸ್ಯೆಗಳನ್ನು ಮೇಲೆ ಚರ್ಚಿಸಲಾಗಿದೆ. ಪ್ರಾಯೋಗಿಕವಾಗಿ, ಕೇಂದ್ರಾಪಗಾಮಿ ಕಾರ್ಯವಿಧಾನಗಳ ಸಮಾನಾಂತರ ಕಾರ್ಯಾಚರಣೆ ಇದೆ ಮತ್ತು ನೆಟ್ವರ್ಕ್ ಹೆಚ್ಚಾಗಿ ವೇರಿಯಬಲ್ ನಿಯತಾಂಕಗಳನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಉದಾಹರಣೆಗೆ, ಗಣಿಗಾರಿಕೆ ಜಾಲದ ವಾಯುಬಲವೈಜ್ಞಾನಿಕ ಪ್ರತಿರೋಧವು ಗೋಡೆಗಳ ಉದ್ದದಲ್ಲಿನ ಬದಲಾವಣೆಯೊಂದಿಗೆ ಬದಲಾಗುತ್ತದೆ, ನೀರು ಸರಬರಾಜು ಜಾಲಗಳ ಹೈಡ್ರೊಡೈನಾಮಿಕ್ ಪ್ರತಿರೋಧವನ್ನು ನೀರಿನ ಬಳಕೆಯ ವಿಧಾನದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ, ಇದು ದಿನದಲ್ಲಿ ಬದಲಾಗುತ್ತದೆ, ಇತ್ಯಾದಿ.
ಕೇಂದ್ರಾಪಗಾಮಿ ಕಾರ್ಯವಿಧಾನಗಳ ಸಮಾನಾಂತರ ಕಾರ್ಯಾಚರಣೆಯೊಂದಿಗೆ, ಎರಡು ಪ್ರಕರಣಗಳು ಸಾಧ್ಯ:
1) ಎಲ್ಲಾ ಕಾರ್ಯವಿಧಾನಗಳ ವೇಗವನ್ನು ಏಕಕಾಲದಲ್ಲಿ ಮತ್ತು ಸಿಂಕ್ರೊನಸ್ ಆಗಿ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ;
2) ಒಂದು ಕಾರ್ಯವಿಧಾನದ ವೇಗ ಅಥವಾ ಕಾರ್ಯವಿಧಾನಗಳ ಭಾಗವು ನಿಯಂತ್ರಿಸಲ್ಪಡುತ್ತದೆ.
ನೆಟ್ವರ್ಕ್ ನಿಯತಾಂಕಗಳು ಸ್ಥಿರವಾಗಿದ್ದರೆ, ಮೊದಲ ಪ್ರಕರಣದಲ್ಲಿ ಎಲ್ಲಾ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಒಂದು ಸಮಾನವೆಂದು ಪರಿಗಣಿಸಬಹುದು, ಇದಕ್ಕಾಗಿ ಮೇಲಿನ ಎಲ್ಲಾ ಸಂಬಂಧಗಳು ಮಾನ್ಯವಾಗಿರುತ್ತವೆ. ಎರಡನೆಯ ಸಂದರ್ಭದಲ್ಲಿ, ಯಾಂತ್ರಿಕ ವ್ಯವಸ್ಥೆಗಳ ಅನಿಯಂತ್ರಿತ ಭಾಗದ ಒತ್ತಡವು ಹಿಂಬದಿಯ ಒತ್ತಡದಂತೆಯೇ ನಿಯಂತ್ರಿತ ಭಾಗದ ಮೇಲೆ ಅದೇ ಪರಿಣಾಮವನ್ನು ಬೀರುತ್ತದೆ ಮತ್ತು ಇದು ಬಹಳ ಮಹತ್ವದ್ದಾಗಿದೆ, ಅದಕ್ಕಾಗಿಯೇ ಇಲ್ಲಿ ವಿದ್ಯುತ್ ಉಳಿತಾಯವು ನಾಮಮಾತ್ರದ ಶಕ್ತಿಯ 10-15% ಅನ್ನು ಮೀರುವುದಿಲ್ಲ. ಯಂತ್ರದ.
ವೇರಿಯಬಲ್ ನೆಟ್ವರ್ಕ್ ನಿಯತಾಂಕಗಳು ಜಾಲಬಂಧದೊಂದಿಗೆ ಕೇಂದ್ರಾಪಗಾಮಿ ಕಾರ್ಯವಿಧಾನಗಳ ಸಹಕಾರದ ವಿಶ್ಲೇಷಣೆಯನ್ನು ಹೆಚ್ಚು ಸಂಕೀರ್ಣಗೊಳಿಸುತ್ತವೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ನಿಯಂತ್ರಿತ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ನ ಶಕ್ತಿಯ ದಕ್ಷತೆಯನ್ನು ಪ್ರದೇಶದ ರೂಪದಲ್ಲಿ ನಿರ್ಧರಿಸಬಹುದು, ಅದರ ಗಡಿಗಳು ನೆಟ್ವರ್ಕ್ ನಿಯತಾಂಕಗಳ ಮಿತಿ ಮೌಲ್ಯಗಳು ಮತ್ತು ಕೇಂದ್ರಾಪಗಾಮಿ ಕಾರ್ಯವಿಧಾನದ ವೇಗಕ್ಕೆ ಅನುಗುಣವಾಗಿರುತ್ತವೆ.
ಈ ವಿಷಯದ ಬಗ್ಗೆಯೂ ನೋಡಿ: ಪಂಪ್ ಘಟಕಗಳಿಗಾಗಿ VLT AQUA ಡ್ರೈವ್ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು