ಗಾಯದ ರೋಟರ್ ಮೋಟಾರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸಲಾಗುತ್ತಿದೆ
ಅಸಮಕಾಲಿಕ ಮೋಟರ್ನ ಆರಂಭಿಕ ಗುಣಲಕ್ಷಣಗಳು ಅದರ ವಿನ್ಯಾಸದ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ, ನಿರ್ದಿಷ್ಟವಾಗಿ ರೋಟರ್ ಸಾಧನದಲ್ಲಿ.
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಪ್ರಾರಂಭವು ಯಂತ್ರದ ಅಸ್ಥಿರ ಪ್ರಕ್ರಿಯೆಯೊಂದಿಗೆ ಇರುತ್ತದೆ, ರೋಟರ್ ಅನ್ನು ವಿಶ್ರಾಂತಿ ಸ್ಥಿತಿಯಿಂದ ಏಕರೂಪದ ತಿರುಗುವಿಕೆಯ ಸ್ಥಿತಿಗೆ ಪರಿವರ್ತಿಸುವುದರೊಂದಿಗೆ ಸಂಬಂಧಿಸಿದೆ, ಇದರಲ್ಲಿ ಮೋಟಾರ್ನ ಟಾರ್ಕ್ ಪ್ರತಿರೋಧ ಶಕ್ತಿಗಳ ಕ್ಷಣವನ್ನು ಸಮತೋಲನಗೊಳಿಸುತ್ತದೆ. ಯಂತ್ರದ ಶಾಫ್ಟ್.
ಅಸಮಕಾಲಿಕ ಮೋಟರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವಾಗ, ಸರಬರಾಜು ಜಾಲದಿಂದ ವಿದ್ಯುತ್ ಶಕ್ತಿಯ ಬಳಕೆ ಹೆಚ್ಚಾಗುತ್ತದೆ, ಇದು ಶಾಫ್ಟ್ಗೆ ಅನ್ವಯಿಸಲಾದ ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್ ಅನ್ನು ಜಯಿಸಲು ಮತ್ತು ಅಸಮಕಾಲಿಕ ಮೋಟರ್ನಲ್ಲಿನ ನಷ್ಟವನ್ನು ಸರಿದೂಗಿಸಲು ಮಾತ್ರವಲ್ಲದೆ ಒಂದು ನಿರ್ದಿಷ್ಟ ಚಲನಶಾಸ್ತ್ರವನ್ನು ಸಂವಹನ ಮಾಡಲು ಸಹ ಖರ್ಚುಮಾಡುತ್ತದೆ. ಉತ್ಪಾದನಾ ಘಟಕದ ಚಲಿಸುವ ಲಿಂಕ್ಗಳಿಗೆ ಶಕ್ತಿ. ಆದ್ದರಿಂದ, ಪ್ರಾರಂಭಿಸುವಾಗ, ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ ಹೆಚ್ಚಿದ ಟಾರ್ಕ್ ಅನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಬೇಕು.
ರೋಟರ್ನೊಂದಿಗೆ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ಗಾಗಿ, n = 1 ನೊಂದಿಗೆ ಸ್ಲಿಪ್ಗೆ ಅನುಗುಣವಾದ ಆರಂಭಿಕ ಟಾರ್ಕ್ ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಪರಿಚಯಿಸಲಾದ ಹೊಂದಾಣಿಕೆಯ ಪ್ರತಿರೋಧಕಗಳ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧಗಳನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ.
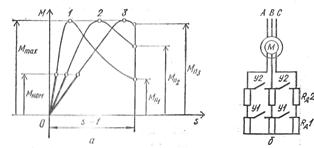
ಅಕ್ಕಿ. 1.ಗಾಯದ ರೋಟರ್ನೊಂದಿಗೆ ಮೂರು-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವುದು: ಎ - ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ ಪ್ರತಿರೋಧಕಗಳ ವಿವಿಧ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧಗಳಲ್ಲಿ ಜಾರುವಿಕೆಯಿಂದ ಗಾಯದ ರೋಟರ್ನೊಂದಿಗೆ ಮೋಟರ್ನ ಟಾರ್ಕ್ ಅವಲಂಬನೆಯ ಗ್ರಾಫ್ಗಳು, ಬಿ - ರೆಸಿಸ್ಟರ್ಗಳನ್ನು ಸಂಪರ್ಕಿಸಲು ಮತ್ತು ಸಂಪರ್ಕಗಳನ್ನು ಮುಚ್ಚುವ ಸರ್ಕ್ಯೂಟ್ ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ಗೆ ವೇಗವರ್ಧನೆ.
ಆದ್ದರಿಂದ, ಮುಚ್ಚಿದ ವೇಗವರ್ಧಕ ಸಂಪರ್ಕಗಳೊಂದಿಗೆ U1, U2, ಅಂದರೆ ಸ್ಲಿಪ್ ರಿಂಗ್ಗಳ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ನೊಂದಿಗೆ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವಾಗ, ಆರಂಭಿಕ ಆರಂಭಿಕ ಟಾರ್ಕ್ Mn1 = (0.5 -1.0) Mnom ಮತ್ತು ಆರಂಭಿಕ ಆರಂಭಿಕ ಪ್ರಸ್ತುತ Azn = ( 4.5 — 7) Aznom ಮತ್ತು ಇತರರು.
ಗಾಯದ ರೋಟರ್ನೊಂದಿಗೆ ಅಸಮಕಾಲಿಕ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಸಣ್ಣ ಆರಂಭಿಕ ಟಾರ್ಕ್ ಉತ್ಪಾದನಾ ಘಟಕ ಮತ್ತು ಅದರ ನಂತರದ ವೇಗವರ್ಧನೆಯನ್ನು ಓಡಿಸಲು ಸಾಕಾಗುವುದಿಲ್ಲ, ಮತ್ತು ಗಮನಾರ್ಹವಾದ ಆರಂಭಿಕ ಪ್ರವಾಹವು ಮೋಟಾರ್ ವಿಂಡ್ಗಳ ಹೆಚ್ಚಿದ ತಾಪನಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ, ಇದು ಅದರ ಸ್ವಿಚಿಂಗ್ ಆವರ್ತನವನ್ನು ಮಿತಿಗೊಳಿಸುತ್ತದೆ ಮತ್ತು ನೆಟ್ವರ್ಕ್ಗಳಲ್ಲಿ ಕಡಿಮೆ ಶಕ್ತಿಯೊಂದಿಗೆ ತಾತ್ಕಾಲಿಕ ವೋಲ್ಟೇಜ್ ಡ್ರಾಪ್ ಇತರ ಗ್ರಾಹಕಗಳ ಕಾರ್ಯಾಚರಣೆಗೆ ಅನಪೇಕ್ಷಿತವಾಗಿದೆ. ಈ ಸಂದರ್ಭಗಳು ಕೆಲಸದ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಚಾಲನೆ ಮಾಡಲು ದೊಡ್ಡ ಆರಂಭಿಕ ಪ್ರವಾಹದೊಂದಿಗೆ ಗಾಯದ-ರೋಟರ್ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ಗಳ ಬಳಕೆಯನ್ನು ತಡೆಗಟ್ಟುವ ಕಾರಣವಾಗಿರಬಹುದು.

ಮೋಟಾರ್ನ ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಹೊಂದಾಣಿಕೆ ರೆಸಿಸ್ಟರ್ಗಳ ಪರಿಚಯವು ಆರಂಭಿಕ ಪ್ರತಿರೋಧಕಗಳು ಎಂದು ಕರೆಯಲ್ಪಡುತ್ತದೆ, ಇದು ಆರಂಭಿಕ ಆರಂಭಿಕ ಪ್ರವಾಹವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ, ಆದರೆ ಅದೇ ಸಮಯದಲ್ಲಿ ಆರಂಭಿಕ ಆರಂಭಿಕ ಟಾರ್ಕ್ ಅನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ, ಇದು ಗರಿಷ್ಠ ಟಾರ್ಕ್ Mmax (orig. 1, a, ಕರ್ವ್ 3), ಹಂತ-ಗಾಯದ ರೋಟರ್ ಮೋಟರ್ನ ನಿರ್ಣಾಯಕ ಸ್ಲಿಪ್ ಆಗಿದ್ದರೆ
skr = (R2' + Rd') / (X1 + X2′) = 1,
ಅಲ್ಲಿ Rd' - ಮೋಟಾರ್ ರೋಟರ್ ಅಂಕುಡೊಂಕಾದ ಹಂತದಲ್ಲಿ ಪ್ರತಿರೋಧಕದ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧ, ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಹಂತಕ್ಕೆ ಕಡಿಮೆಯಾಗಿದೆ.ಆರಂಭಿಕ ಪ್ರತಿರೋಧಕದ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧವನ್ನು ಮತ್ತಷ್ಟು ಹೆಚ್ಚಿಸುವುದು ಅಪ್ರಾಯೋಗಿಕವಾಗಿದೆ, ಏಕೆಂದರೆ ಇದು ಆರಂಭಿಕ ಆರಂಭಿಕ ಟಾರ್ಕ್ನ ದುರ್ಬಲಗೊಳ್ಳುವಿಕೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ ಮತ್ತು ಸ್ಲಿಪ್ ಪ್ರದೇಶದಲ್ಲಿ ಗರಿಷ್ಠ ಟಾರ್ಕ್ನ ಬಿಂದುವನ್ನು ನಿರ್ಗಮಿಸುತ್ತದೆ s> 1, ಇದು ರೋಟರ್ ಅನ್ನು ವೇಗಗೊಳಿಸುವ ಸಾಧ್ಯತೆಯನ್ನು ಹೊರತುಪಡಿಸುತ್ತದೆ.
ಒಂದು ಹಂತದ ರೋಟರ್ ಮೋಟರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸಲು ಪ್ರತಿರೋಧಕಗಳ ಅಗತ್ಯವಿರುವ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧವನ್ನು ಆರಂಭಿಕ ಅವಶ್ಯಕತೆಗಳ ಆಧಾರದ ಮೇಲೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ, ಇದು Mn = (0.1 - 0.4) Mnom ಆಗಿದ್ದರೆ ಹಗುರವಾಗಿರುತ್ತದೆ, Mn ಆಗಿದ್ದರೆ ಸಾಮಾನ್ಯ - (0.5 - 0.75) Mn ಮತ್ತು Mn ನಲ್ಲಿ ತೀವ್ರವಾಗಿರುತ್ತದೆ ≥ I.
ಉತ್ಪಾದನಾ ಘಟಕದ ವೇಗವರ್ಧನೆಯ ಸಮಯದಲ್ಲಿ ಹಂತ-ಗಾಯದ ರೋಟರ್ ಮೋಟಾರ್ನೊಂದಿಗೆ ಸಾಕಷ್ಟು ದೊಡ್ಡ ಟಾರ್ಕ್ ಅನ್ನು ನಿರ್ವಹಿಸಲು, ಅಸ್ಥಿರ ಪ್ರಕ್ರಿಯೆಯ ಅವಧಿಯನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಮತ್ತು ಮೋಟರ್ನ ತಾಪನವನ್ನು ಕಡಿಮೆ ಮಾಡಲು, ಸಕ್ರಿಯ ಪ್ರತಿರೋಧವನ್ನು ಕ್ರಮೇಣ ಕಡಿಮೆ ಮಾಡುವುದು ಅವಶ್ಯಕ. ಆರಂಭಿಕ ಪ್ರತಿರೋಧಕಗಳ. ವೇಗವರ್ಧಕ M (t) ಸಮಯದಲ್ಲಿ ಟಾರ್ಕ್ನ ಅನುಮತಿಸುವ ಬದಲಾವಣೆಯು ಗರಿಷ್ಠ ಟಾರ್ಕ್ ಮಿತಿಯನ್ನು ಸೀಮಿತಗೊಳಿಸುವ ವಿದ್ಯುತ್ ಮತ್ತು ಯಾಂತ್ರಿಕ ಪರಿಸ್ಥಿತಿಗಳಿಂದ ನಿರ್ಧರಿಸಲ್ಪಡುತ್ತದೆ M> 0.85Mmax, ಸ್ವಿಚಿಂಗ್ ಕ್ಷಣ M2 >> Ms (Fig. 2), ಹಾಗೆಯೇ ವೇಗವರ್ಧನೆ.

ಅಕ್ಕಿ. 2. ಗಾಯದ ರೋಟರ್ನೊಂದಿಗೆ ಮೂರು-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ನ ಆರಂಭಿಕ ಗುಣಲಕ್ಷಣಗಳು

ಆರಂಭಿಕ ಪ್ರತಿರೋಧಕಗಳ ಸೇರ್ಪಡೆಯು ಅನುಕ್ರಮವಾಗಿ Y1, Y2 ವೇಗವರ್ಧಕಗಳನ್ನು ಅನುಕ್ರಮವಾಗಿ ಸೇರಿಸುವ ಮೂಲಕ ಖಾತ್ರಿಪಡಿಸಲ್ಪಡುತ್ತದೆ, ಸಮಯ t1, t2, ವೇಗವರ್ಧನೆಯ ಸಮಯದಲ್ಲಿ ಟಾರ್ಕ್ M ಸ್ವಿಚಿಂಗ್ ಕ್ಷಣ M2 ಗೆ ಸಮಾನವಾದಾಗ ಎಂಜಿನ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವ ಕ್ಷಣದಿಂದ ಎಣಿಸಲಾಗುತ್ತದೆ. ಆದ್ದರಿಂದ, ಸಂಪೂರ್ಣ ಪ್ರಾರಂಭದ ಸಮಯದಲ್ಲಿ, ಎಲ್ಲಾ ಗರಿಷ್ಠ ಟಾರ್ಕ್ಗಳು ಒಂದೇ ಆಗಿರುತ್ತವೆ ಮತ್ತು ಎಲ್ಲಾ ಸ್ವಿಚಿಂಗ್ ಟಾರ್ಕ್ಗಳು ಪರಸ್ಪರ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಗಾಯದ ರೋಟರ್ನೊಂದಿಗೆ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ನ ಟಾರ್ಕ್ ಮತ್ತು ಪ್ರವಾಹವು ಪರಸ್ಪರ ಸಂಬಂಧಿಸಿರುವುದರಿಂದ, ರೋಟರ್ ವೇಗವರ್ಧನೆ I1 = (1.5 - 2.5) Aznom ಮತ್ತು ಸ್ವಿಚಿಂಗ್ ಕರೆಂಟ್ Az2 ಸಮಯದಲ್ಲಿ ಗರಿಷ್ಠ ಪ್ರಸ್ತುತ ಮಿತಿಯನ್ನು ಹೊಂದಿಸಲು ಸಾಧ್ಯವಿದೆ, ಇದು ಸ್ವಿಚಿಂಗ್ ಕ್ಷಣ M2 ಅನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಬೇಕು. > M.° C.
ಪೂರೈಕೆ ಜಾಲದಿಂದ ಗಾಯದ ರೋಟರ್ನೊಂದಿಗೆ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳ ಸಂಪರ್ಕ ಕಡಿತವನ್ನು ಯಾವಾಗಲೂ ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ನೊಂದಿಗೆ ನಡೆಸಲಾಗುತ್ತದೆ, ಇದು ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಹಂತಗಳಲ್ಲಿ ಓವರ್ವೋಲ್ಟೇಜ್ಗಳ ನೋಟವನ್ನು ತಪ್ಪಿಸುತ್ತದೆ, ಇದು ಈ ಹಂತಗಳ ನಾಮಮಾತ್ರ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಮೀರಬಹುದು. 3 - 4 ಬಾರಿ, ಮೋಟಾರ್ ನಿಲ್ಲುವ ಕ್ಷಣದಲ್ಲಿ ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ ತೆರೆದಿದ್ದರೆ.
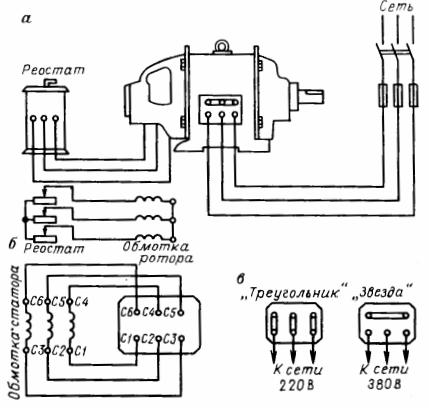
ಅಕ್ಕಿ. 3. ಒಂದು ಹಂತದ ರೋಟರ್ನೊಂದಿಗೆ ಮೋಟಾರ್ ವಿಂಡ್ಗಳ ಸಂಪರ್ಕ ಯೋಜನೆ: a - ವಿದ್ಯುತ್ ನೆಟ್ವರ್ಕ್ಗೆ, b - ರೋಟರ್, c - ಟರ್ಮಿನಲ್ ಬೋರ್ಡ್ನಲ್ಲಿ.
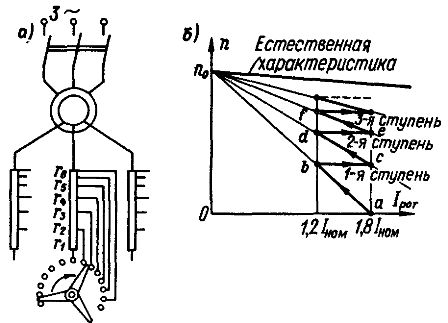
ಅಕ್ಕಿ. 4. ಒಂದು ಹಂತದ ರೋಟರ್ನೊಂದಿಗೆ ಮೋಟಾರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವುದು: a - ಸ್ವಿಚಿಂಗ್ ಸರ್ಕ್ಯೂಟ್, ಬಿ - ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು