ಕಂಡೆನ್ಸರ್ ಮೋಟಾರ್ಸ್ - ಸಾಧನ, ಕಾರ್ಯಾಚರಣೆಯ ತತ್ವ, ಅಪ್ಲಿಕೇಶನ್
 ಈ ಲೇಖನದಲ್ಲಿ ನಾವು ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳ ಬಗ್ಗೆ ಮಾತನಾಡುತ್ತೇವೆ, ಅವುಗಳು ವಾಸ್ತವವಾಗಿ ಸಾಮಾನ್ಯ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳಾಗಿವೆ, ಅವುಗಳು ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದ ರೀತಿಯಲ್ಲಿ ಮಾತ್ರ ಭಿನ್ನವಾಗಿರುತ್ತವೆ. ಕೆಪಾಸಿಟರ್ ಆಯ್ಕೆಯ ವಿಷಯದ ಮೇಲೆ ಸ್ಪರ್ಶಿಸೋಣ, ಸಾಮರ್ಥ್ಯದ ನಿಖರವಾದ ಆಯ್ಕೆಯ ಅಗತ್ಯತೆಯ ಕಾರಣಗಳನ್ನು ವಿಶ್ಲೇಷಿಸಿ. ಅಗತ್ಯವಿರುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಸರಿಸುಮಾರು ಅಂದಾಜು ಮಾಡಲು ಸಹಾಯ ಮಾಡುವ ಮುಖ್ಯ ಸೂತ್ರಗಳನ್ನು ಗಮನಿಸೋಣ.
ಈ ಲೇಖನದಲ್ಲಿ ನಾವು ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳ ಬಗ್ಗೆ ಮಾತನಾಡುತ್ತೇವೆ, ಅವುಗಳು ವಾಸ್ತವವಾಗಿ ಸಾಮಾನ್ಯ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳಾಗಿವೆ, ಅವುಗಳು ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದ ರೀತಿಯಲ್ಲಿ ಮಾತ್ರ ಭಿನ್ನವಾಗಿರುತ್ತವೆ. ಕೆಪಾಸಿಟರ್ ಆಯ್ಕೆಯ ವಿಷಯದ ಮೇಲೆ ಸ್ಪರ್ಶಿಸೋಣ, ಸಾಮರ್ಥ್ಯದ ನಿಖರವಾದ ಆಯ್ಕೆಯ ಅಗತ್ಯತೆಯ ಕಾರಣಗಳನ್ನು ವಿಶ್ಲೇಷಿಸಿ. ಅಗತ್ಯವಿರುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಸರಿಸುಮಾರು ಅಂದಾಜು ಮಾಡಲು ಸಹಾಯ ಮಾಡುವ ಮುಖ್ಯ ಸೂತ್ರಗಳನ್ನು ಗಮನಿಸೋಣ.
ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ ಅಸಮಕಾಲಿಕ ಎಂಜಿನ್, ಸ್ಟೇಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ, ಇದರಲ್ಲಿ ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳಲ್ಲಿ ಪ್ರಸ್ತುತದ ಹಂತದ ಶಿಫ್ಟ್ ಅನ್ನು ರಚಿಸಲು ಹೆಚ್ಚುವರಿ ಕೆಪಾಸಿಟನ್ಸ್ ಅನ್ನು ಸೇರಿಸಲಾಗಿದೆ. ಮೂರು-ಹಂತ ಅಥವಾ ಎರಡು-ಹಂತದ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ಗಳನ್ನು ಬಳಸಿದಾಗ ಏಕ-ಹಂತದ ಸರ್ಕ್ಯೂಟ್ಗಳಿಗೆ ಇದು ಹೆಚ್ಚಾಗಿ ಅನ್ವಯಿಸುತ್ತದೆ.
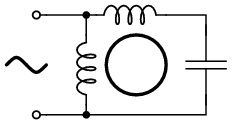
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳು ಭೌತಿಕವಾಗಿ ಪರಸ್ಪರ ಸರಿದೂಗಿಸಲ್ಪಡುತ್ತವೆ ಮತ್ತು ಅವುಗಳಲ್ಲಿ ಒಂದನ್ನು ನೇರವಾಗಿ ಮುಖ್ಯಕ್ಕೆ ಸಂಪರ್ಕಿಸಲಾಗುತ್ತದೆ, ಆದರೆ ಎರಡನೆಯ ಅಥವಾ ಎರಡನೆಯ ಮತ್ತು ಮೂರನೆಯದು ಕೆಪಾಸಿಟರ್ ಮೂಲಕ ಮುಖ್ಯಕ್ಕೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ.ಕೆಪಾಸಿಟರ್ನ ಸಾಮರ್ಥ್ಯವನ್ನು ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ ಆದ್ದರಿಂದ ವಿಂಡ್ಗಳ ನಡುವಿನ ಪ್ರವಾಹಗಳ ಹಂತದ ಶಿಫ್ಟ್ ಸಮಾನವಾಗಿರುತ್ತದೆ ಅಥವಾ ಕನಿಷ್ಠ 90 ° ಗೆ ಹತ್ತಿರವಾಗಿರುತ್ತದೆ, ನಂತರ ರೋಟರ್ಗೆ ಗರಿಷ್ಠ ಟಾರ್ಕ್ ಅನ್ನು ಒದಗಿಸಲಾಗುತ್ತದೆ.
ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಅಂಕುಡೊಂಕಾದ ಕಾಂತೀಯ ಪ್ರಚೋದನೆಯ ಮಾಡ್ಯೂಲ್ಗಳು ಒಂದೇ ಆಗಿರಬೇಕು, ಇದರಿಂದಾಗಿ ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳ ಕಾಂತೀಯ ಕ್ಷೇತ್ರಗಳು ಪರಸ್ಪರ ಸಂಬಂಧಿಸಿ ಸ್ಥಳಾಂತರಗೊಳ್ಳುತ್ತವೆ, ಇದರಿಂದಾಗಿ ಒಟ್ಟು ಕ್ಷೇತ್ರವು ವೃತ್ತದಲ್ಲಿ ತಿರುಗುತ್ತದೆ ಮತ್ತು ಅಲ್ಲ ದೀರ್ಘವೃತ್ತ, ಅದರೊಂದಿಗೆ ರೋಟರ್ ಅನ್ನು ಅತ್ಯಂತ ದಕ್ಷತೆಯೊಂದಿಗೆ ಎಳೆಯುತ್ತದೆ.
ನಿಸ್ಸಂಶಯವಾಗಿ, ಕೆಪಾಸಿಟರ್ನಾದ್ಯಂತ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಸುರುಳಿಯಲ್ಲಿನ ಪ್ರಸ್ತುತ ಮತ್ತು ಅದರ ಹಂತವು ಕೆಪಾಸಿಟರ್ನ ಧಾರಣ ಮತ್ತು ಸುರುಳಿಯ ಪರಿಣಾಮಕಾರಿ ಪ್ರತಿರೋಧ ಎರಡಕ್ಕೂ ಸಂಬಂಧಿಸಿದೆ, ಇದು ರೋಟರ್ನ ವೇಗವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ.
ಮೋಟರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವಾಗ, ಅಂಕುಡೊಂಕಾದ ಪ್ರತಿರೋಧವನ್ನು ಅದರ ಇಂಡಕ್ಟನ್ಸ್ ಮತ್ತು ಸಕ್ರಿಯ ಪ್ರತಿರೋಧದಿಂದ ಮಾತ್ರ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ, ಆದ್ದರಿಂದ ಪ್ರಾರಂಭದ ಸಮಯದಲ್ಲಿ ಇದು ತುಲನಾತ್ಮಕವಾಗಿ ಚಿಕ್ಕದಾಗಿದೆ ಮತ್ತು ಇಲ್ಲಿ ಸೂಕ್ತವಾದ ಪ್ರಾರಂಭವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ದೊಡ್ಡ ಕೆಪಾಸಿಟರ್ ಅಗತ್ಯವಿದೆ.
ರೋಟರ್ ದರದ ವೇಗಕ್ಕೆ ವೇಗವನ್ನು ಹೆಚ್ಚಿಸಿದಂತೆ, ರೋಟರ್ನ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವು ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳಲ್ಲಿ EMF ಅನ್ನು ಪ್ರೇರೇಪಿಸುತ್ತದೆ, ಇದು ವಿಂಡಿಂಗ್ ಅನ್ನು ಪೂರೈಸುವ ವೋಲ್ಟೇಜ್ಗೆ ವಿರುದ್ಧವಾಗಿ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ - ಅಂಕುಡೊಂಕಾದ ಪ್ರಸ್ತುತ ಪರಿಣಾಮಕಾರಿ ಪ್ರತಿರೋಧವು ಹೆಚ್ಚಾಗುತ್ತದೆ ಮತ್ತು ಅಗತ್ಯ ಧಾರಣವು ಕಡಿಮೆಯಾಗುತ್ತದೆ.
ಪ್ರತಿ ಮೋಡ್ನಲ್ಲಿ (ಸ್ಟಾರ್ಟ್-ಅಪ್ ಮೋಡ್, ಆಪರೇಟಿಂಗ್ ಮೋಡ್) ಅತ್ಯುತ್ತಮವಾಗಿ ಆಯ್ಕೆಮಾಡಿದ ಸಾಮರ್ಥ್ಯದೊಂದಿಗೆ, ಆಯಸ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರವು ವೃತ್ತಾಕಾರವಾಗಿರುತ್ತದೆ ಮತ್ತು ಇಲ್ಲಿ ರೋಟರ್ ವೇಗ ಮತ್ತು ವೋಲ್ಟೇಜ್, ಮತ್ತು ವಿಂಡ್ಗಳ ಸಂಖ್ಯೆ ಮತ್ತು ಪ್ರಸ್ತುತಕ್ಕೆ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಧಾರಣವು ಪ್ರಸ್ತುತವಾಗಿರುತ್ತದೆ. . ಯಾವುದೇ ನಿಯತಾಂಕದ ಸೂಕ್ತ ಮೌಲ್ಯವನ್ನು ಉಲ್ಲಂಘಿಸಿದರೆ, ಕ್ಷೇತ್ರವು ದೀರ್ಘವೃತ್ತವಾಗುತ್ತದೆ ಮತ್ತು ಮೋಟಾರ್ ಗುಣಲಕ್ಷಣಗಳು ಅದಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಕಡಿಮೆಯಾಗುತ್ತವೆ.
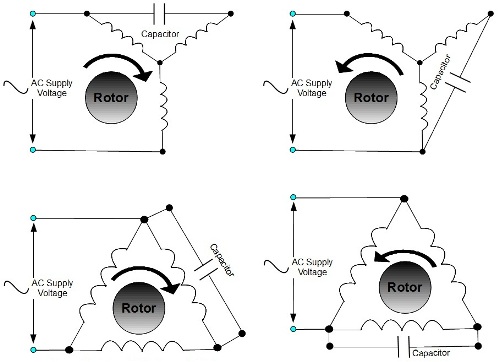
ವಿಭಿನ್ನ ಉದ್ದೇಶಗಳಿಗಾಗಿ ಎಂಜಿನ್ಗಳಿಗಾಗಿ, ಕೆಪಾಸಿಟರ್ನ ಸಂಪರ್ಕ ಯೋಜನೆಗಳು ವಿಭಿನ್ನವಾಗಿವೆ.ಅವರು ಗಮನಾರ್ಹವಾದಾಗ ಟಾರ್ಕ್ ಪ್ರಾರಂಭವಾಗುತ್ತಿದೆ, ಪ್ರಾರಂಭದಲ್ಲಿ ಗರಿಷ್ಠ ಪ್ರಸ್ತುತ ಮತ್ತು ಹಂತವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ದೊಡ್ಡ ಸಾಮರ್ಥ್ಯದ ಕೆಪಾಸಿಟರ್ ಅನ್ನು ಬಳಸಿ. ಆರಂಭಿಕ ಟಾರ್ಕ್ ವಿಶೇಷವಾಗಿ ಮುಖ್ಯವಲ್ಲದಿದ್ದರೆ, ರೇಟ್ ಮಾಡಿದ ವೇಗದಲ್ಲಿ ಆಪರೇಟಿಂಗ್ ಮೋಡ್ಗೆ ಸೂಕ್ತವಾದ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ರಚಿಸಲು ಮಾತ್ರ ಗಮನ ನೀಡಲಾಗುತ್ತದೆ ಮತ್ತು ರೇಟ್ ಮಾಡಿದ ವೇಗಕ್ಕೆ ಸಾಮರ್ಥ್ಯವನ್ನು ಆಯ್ಕೆ ಮಾಡಲಾಗುತ್ತದೆ.
ಆಗಾಗ್ಗೆ, ಉತ್ತಮ-ಗುಣಮಟ್ಟದ ಪ್ರಾರಂಭಕ್ಕಾಗಿ, ಪ್ರಾರಂಭದ ಕೆಪಾಸಿಟರ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಇದು ಪ್ರಾರಂಭದ ಸಮಯದಲ್ಲಿ ತುಲನಾತ್ಮಕವಾಗಿ ಸಣ್ಣ ಸಾಮರ್ಥ್ಯದ ಚಾಲನೆಯಲ್ಲಿರುವ ಕೆಪಾಸಿಟರ್ನೊಂದಿಗೆ ಸಮಾನಾಂತರವಾಗಿ ಸಂಪರ್ಕಗೊಳ್ಳುತ್ತದೆ, ಆದ್ದರಿಂದ ಪ್ರಾರಂಭದ ಸಮಯದಲ್ಲಿ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವು ವೃತ್ತಾಕಾರವಾಗಿರುತ್ತದೆ, ನಂತರ ಪ್ರಾರಂಭ ಕೆಪಾಸಿಟರ್ ಅನ್ನು ಆಫ್ ಮಾಡಲಾಗಿದೆ ಮತ್ತು ಕೆಪಾಸಿಟರ್ ಚಾಲನೆಯಲ್ಲಿರುವಾಗ ಮಾತ್ರ ಮೋಟಾರ್ ಚಾಲನೆಯಲ್ಲಿದೆ. ವಿಶೇಷ ಸಂದರ್ಭಗಳಲ್ಲಿ, ಸ್ವಿಚ್ ಮಾಡಬಹುದಾದ ಕೆಪಾಸಿಟರ್ಗಳ ಸೆಟ್ ಅನ್ನು ವಿವಿಧ ಲೋಡ್ಗಳಿಗೆ ಬಳಸಲಾಗುತ್ತದೆ.

ಮೋಟಾರು ದರದ ವೇಗವನ್ನು ತಲುಪಿದ ನಂತರ ಪ್ರಾರಂಭದ ಕೆಪಾಸಿಟರ್ ಆಕಸ್ಮಿಕವಾಗಿ ಸಂಪರ್ಕ ಕಡಿತಗೊಳ್ಳದಿದ್ದರೆ, ಅಂಕುಡೊಂಕಾದ ಹಂತದ ಶಿಫ್ಟ್ ಕಡಿಮೆಯಾಗುತ್ತದೆ, ಸೂಕ್ತವಾಗಿರುವುದಿಲ್ಲ ಮತ್ತು ಸ್ಟೇಟರ್ ಮ್ಯಾಗ್ನೆಟಿಕ್ ಫೀಲ್ಡ್ ಅಂಡಾಕಾರದ ಆಗುತ್ತದೆ, ಇದು ಮೋಟರ್ನ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಕುಗ್ಗಿಸುತ್ತದೆ. ಇಂಜಿನ್ ಪರಿಣಾಮಕಾರಿಯಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸಲು ನೀವು ಸರಿಯಾದ ಆರಂಭಿಕ ಮತ್ತು ಕಾರ್ಯಾಚರಣಾ ಸಾಮರ್ಥ್ಯವನ್ನು ಆಯ್ಕೆಮಾಡುವುದು ಕಡ್ಡಾಯವಾಗಿದೆ.
ಆಚರಣೆಯಲ್ಲಿ ಬಳಸಲಾಗುವ ವಿಶಿಷ್ಟ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ ಸ್ವಿಚಿಂಗ್ ಯೋಜನೆಗಳನ್ನು ಚಿತ್ರ ತೋರಿಸುತ್ತದೆ. ಉದಾಹರಣೆಗೆ, ಎರಡು-ಹಂತದ ಅಳಿಲು-ಕೇಜ್ ಮೋಟಾರ್ ಅನ್ನು ಪರಿಗಣಿಸಿ, ಅದರ ಸ್ಟೇಟರ್ A ಮತ್ತು B ಎರಡು ಹಂತಗಳನ್ನು ಪೂರೈಸಲು ಎರಡು ವಿಂಡ್ಗಳನ್ನು ಹೊಂದಿದೆ.
ಕೆಪಾಸಿಟರ್ ಸಿ ಅನ್ನು ಸ್ಟೇಟರ್ನ ಹೆಚ್ಚುವರಿ ಹಂತದ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಸೇರಿಸಲಾಗಿದೆ, ಆದ್ದರಿಂದ ಎರಡು ಹಂತಗಳಲ್ಲಿ ಸ್ಟೇಟರ್ನ ಎರಡು ವಿಂಡ್ಗಳಲ್ಲಿ ಪ್ರವಾಹಗಳು IA ಮತ್ತು IB ಹರಿಯುತ್ತವೆ. ಕೆಪಾಸಿಟನ್ಸ್ ಉಪಸ್ಥಿತಿಯ ಮೂಲಕ, 90 ° ನ IA ಮತ್ತು IB ಪ್ರವಾಹಗಳ ಹಂತದ ಬದಲಾವಣೆಯನ್ನು ಸಾಧಿಸಲಾಗುತ್ತದೆ.
IA ಮತ್ತು IB ಎರಡು ಹಂತಗಳ ಪ್ರವಾಹಗಳ ಜ್ಯಾಮಿತೀಯ ಮೊತ್ತದಿಂದ ನೆಟ್ವರ್ಕ್ನ ಒಟ್ಟು ಪ್ರವಾಹವು ರೂಪುಗೊಂಡಿದೆ ಎಂದು ವೆಕ್ಟರ್ ರೇಖಾಚಿತ್ರವು ತೋರಿಸುತ್ತದೆ. ಕೆಪಾಸಿಟನ್ಸ್ ಸಿ ಅನ್ನು ಆರಿಸುವ ಮೂಲಕ, ಅವರು ವಿಂಡ್ಗಳ ಇಂಡಕ್ಟನ್ಸ್ನೊಂದಿಗೆ ಅಂತಹ ಸಂಯೋಜನೆಯನ್ನು ಸಾಧಿಸುತ್ತಾರೆ, ಪ್ರವಾಹಗಳ ಹಂತದ ಬದಲಾವಣೆಯು ನಿಖರವಾಗಿ 90 ° ಆಗಿದೆ.
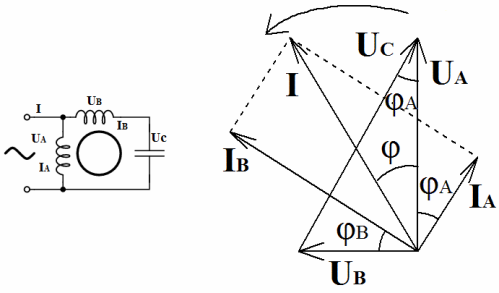
ಪ್ರಸ್ತುತ IA ಕೋನ φA ಮೂಲಕ ಅನ್ವಯಿಕ ಲೈನ್ ವೋಲ್ಟೇಜ್ UA ಗಿಂತ ಹಿಂದುಳಿದಿದೆ, ಮತ್ತು ಪ್ರಸ್ತುತ IB ಕೋನ φB ಮೂಲಕ ಪ್ರಸ್ತುತ ಕ್ಷಣದಲ್ಲಿ ಎರಡನೇ ಅಂಕುಡೊಂಕಾದ ಟರ್ಮಿನಲ್ಗಳಿಗೆ ಅನ್ವಯಿಸಲಾದ ವೋಲ್ಟೇಜ್ UB ಗಿಂತ ಹಿಂದುಳಿದಿದೆ. ಮುಖ್ಯ ವೋಲ್ಟೇಜ್ ಮತ್ತು ಎರಡನೇ ಸುರುಳಿಗೆ ಅನ್ವಯಿಸಲಾದ ವೋಲ್ಟೇಜ್ ನಡುವಿನ ಕೋನವು 90 ° ಆಗಿದೆ. ಕೆಪಾಸಿಟರ್ USC ಯಲ್ಲಿನ ವೋಲ್ಟೇಜ್ ಪ್ರಸ್ತುತ IV ನೊಂದಿಗೆ 90 ° ಕೋನವನ್ನು ರೂಪಿಸುತ್ತದೆ.
ನೆಟ್ವರ್ಕ್ನಿಂದ ಮೋಟಾರು ಸೇವಿಸುವ ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಶಕ್ತಿಯು ಕೆಪಾಸಿಟರ್ C ಯ ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಶಕ್ತಿಗೆ ಸಮಾನವಾದಾಗ φ = 0 ನಲ್ಲಿ ಹಂತದ ಶಿಫ್ಟ್ನ ಸಂಪೂರ್ಣ ಪರಿಹಾರವನ್ನು ಸಾಧಿಸಲಾಗುತ್ತದೆ ಎಂದು ರೇಖಾಚಿತ್ರವು ತೋರಿಸುತ್ತದೆ. ಸ್ಟೇಟರ್ನ ಅಂಕುಡೊಂಕಾದ ಸರ್ಕ್ಯೂಟ್ಗಳಲ್ಲಿ ಕೆಪಾಸಿಟರ್ಗಳು.
ಉದ್ಯಮವು ಇಂದು ಎರಡು-ಹಂತದ ಆಧಾರದ ಮೇಲೆ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳನ್ನು ಉತ್ಪಾದಿಸುತ್ತದೆ. ಏಕ-ಹಂತದ ನೆಟ್ವರ್ಕ್ನಿಂದ ಸರಬರಾಜು ಮಾಡಲು ಮೂರು-ಹಂತವನ್ನು ಸುಲಭವಾಗಿ ಹಸ್ತಚಾಲಿತವಾಗಿ ಮಾರ್ಪಡಿಸಲಾಗುತ್ತದೆ. ಸಣ್ಣ ಮೂರು-ಹಂತದ ಮಾರ್ಪಾಡುಗಳು ಸಹ ಇವೆ, ಈಗಾಗಲೇ ಏಕ-ಹಂತದ ನೆಟ್ವರ್ಕ್ಗಾಗಿ ಕೆಪಾಸಿಟರ್ನೊಂದಿಗೆ ಹೊಂದುವಂತೆ ಮಾಡಲಾಗಿದೆ.
ಈ ಪರಿಹಾರಗಳು ಸಾಮಾನ್ಯವಾಗಿ ಡಿಶ್ವಾಶರ್ಸ್ ಮತ್ತು ರೂಮ್ ಫ್ಯಾನ್ಗಳಂತಹ ಗೃಹೋಪಯೋಗಿ ಉಪಕರಣಗಳಲ್ಲಿ ಕಂಡುಬರುತ್ತವೆ. ಕೈಗಾರಿಕಾ ಪರಿಚಲನೆ ಪಂಪ್ಗಳು, ಫ್ಯಾನ್ಗಳು ಮತ್ತು ಫ್ಲೂಗಳು ತಮ್ಮ ಕಾರ್ಯಾಚರಣೆಯಲ್ಲಿ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳನ್ನು ಹೆಚ್ಚಾಗಿ ಬಳಸುತ್ತವೆ. ಏಕ-ಹಂತದ ನೆಟ್ವರ್ಕ್ನಲ್ಲಿ ಮೂರು-ಹಂತದ ಮೋಟರ್ ಅನ್ನು ಸೇರಿಸಲು ಅಗತ್ಯವಿದ್ದರೆ, ಒಂದು ಹಂತದ ಶಿಫ್ಟ್ ಹೊಂದಿರುವ ಕೆಪಾಸಿಟರ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಅಂದರೆ, ಮೋಟಾರ್ ಅನ್ನು ಮತ್ತೆ ಕೆಪಾಸಿಟರ್ ಆಗಿ ಪರಿವರ್ತಿಸಲಾಗುತ್ತದೆ.

ಕೆಪಾಸಿಟರ್ನ ಸಾಮರ್ಥ್ಯವನ್ನು ಅಂದಾಜು ಮಾಡಲು, ತಿಳಿದಿರುವ ಸೂತ್ರಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಇದರಲ್ಲಿ ಸರಬರಾಜು ವೋಲ್ಟೇಜ್ ಮತ್ತು ಮೋಟರ್ನ ಆಪರೇಟಿಂಗ್ ಕರೆಂಟ್ ಅನ್ನು ಬದಲಿಸಲು ಸಾಕು, ಮತ್ತು ಅಗತ್ಯವಿರುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುವುದು ಸುಲಭ ವಿಂಡ್ಗಳ ನಕ್ಷತ್ರ ಅಥವಾ ಡೆಲ್ಟಾ ಸಂಪರ್ಕ.
ಮೋಟಾರಿನ ಆಪರೇಟಿಂಗ್ ಕರೆಂಟ್ ಅನ್ನು ಕಂಡುಹಿಡಿಯಲು, ಅದರ ನಾಮಫಲಕದಲ್ಲಿ (ಶಕ್ತಿ, ದಕ್ಷತೆ, ಕೊಸೈನ್ ಫಿ) ಡೇಟಾವನ್ನು ಓದಲು ಮತ್ತು ಅದನ್ನು ಸೂತ್ರದಲ್ಲಿ ಬದಲಿಸಲು ಸಾಕು. ಆರಂಭಿಕ ಕೆಪಾಸಿಟರ್ ಆಗಿ, ಕೆಲಸ ಮಾಡುವ ಕೆಪಾಸಿಟರ್ನ ಎರಡು ಪಟ್ಟು ಗಾತ್ರದ ಕೆಪಾಸಿಟರ್ ಅನ್ನು ಸ್ಥಾಪಿಸಲು ಇದು ರೂಢಿಯಾಗಿದೆ.

ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳ ಅನುಕೂಲಗಳು, ವಾಸ್ತವವಾಗಿ - ಅಸಮಕಾಲಿಕ, ಮುಖ್ಯವಾಗಿ ಒಂದನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ - ಮೂರು-ಹಂತದ ಮೋಟರ್ ಅನ್ನು ಏಕ-ಹಂತದ ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಿಸುವ ಸಾಧ್ಯತೆ. ಅನಾನುಕೂಲಗಳ ಪೈಕಿ ನಿರ್ದಿಷ್ಟ ಹೊರೆಗೆ ಸೂಕ್ತವಾದ ಸಾಮರ್ಥ್ಯದ ಅಗತ್ಯತೆ ಮತ್ತು ಮಾರ್ಪಡಿಸಿದ ಸೈನ್ ವೇವ್ ಇನ್ವರ್ಟರ್ಗಳಿಂದ ವಿದ್ಯುತ್ ಸರಬರಾಜಿನ ಅಸಮರ್ಥತೆ.
ಈ ಲೇಖನವು ನಿಮಗೆ ಉಪಯುಕ್ತವಾಗಿದೆ ಎಂದು ನಾವು ಭಾವಿಸುತ್ತೇವೆ ಮತ್ತು ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳಿಗೆ ಕೆಪಾಸಿಟರ್ಗಳು ಯಾವುವು ಮತ್ತು ಅವುಗಳ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೇಗೆ ಆರಿಸಬೇಕು ಎಂಬುದನ್ನು ಈಗ ನೀವು ಅರ್ಥಮಾಡಿಕೊಂಡಿದ್ದೀರಿ.