ರಿವರ್ಸಿಬಲ್ ಏಕ-ಹಂತದ ಮೋಟಾರ್
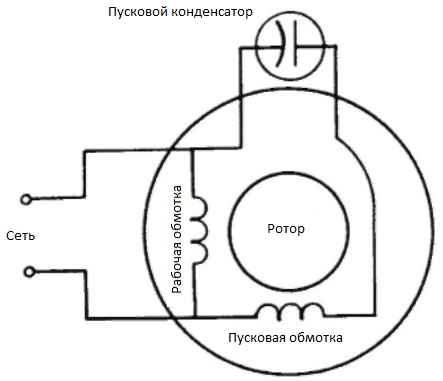
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ ಅನ್ನು ಏಕ-ಹಂತದ ಮೋಟಾರ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ, ಅದರ ಸ್ಟೇಟರ್ನಲ್ಲಿ ಕೇವಲ ಒಂದು ಕೆಲಸದ ಅಂಕುಡೊಂಕಾದಿದೆ, ನೇರವಾಗಿ ನೆಟ್ವರ್ಕ್ನ ಒಂದು ಹಂತದಿಂದ ಸರಬರಾಜು ಮಾಡಲಾಗುತ್ತದೆ. ಏಕ-ಹಂತದ ಮೋಟಾರ್ನಲ್ಲಿ ಸಹಾಯಕ (ಪ್ರಾರಂಭಿಕ) ಅಂಕುಡೊಂಕಾದ ಸಹ ಇದೆ, ಇದನ್ನು ರೋಟರ್ಗೆ ಆರಂಭಿಕ ಪ್ರಚೋದನೆಯನ್ನು ನೀಡಲು ಮೋಟರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವ ಸಮಯದಲ್ಲಿ ಮಾತ್ರ ಬಳಸಲಾಗುತ್ತದೆ, ವಾಸ್ತವವಾಗಿ, ರೋಟರ್ ಅನ್ನು ಹೊರತೆಗೆಯಲು ಆರಂಭಿಕ ವಿಂಡಿಂಗ್ ಅನ್ನು ಆನ್ ಮಾಡಲಾಗಿದೆ. ಸಮತೋಲನದ ಸ್ಥಾನ, ಇಲ್ಲದಿದ್ದರೆ ಅದು ಸಹಾಯವಿಲ್ಲದೆ ಚಲಿಸುವುದಿಲ್ಲ ಮತ್ತು ಅವನನ್ನು ಬೇರೆ ರೀತಿಯಲ್ಲಿ ತಳ್ಳಬೇಕಾಗುತ್ತದೆ.
ಯಾವುದೇ ಮೋಟಾರ್ನಂತೆ, ಏಕ-ಹಂತದ ಮೋಟಾರು ತಿರುಗುವ ರೋಟರ್ ಮತ್ತು ಸ್ಟೇಟರ್ ಅನ್ನು ಸಹ ಹೊಂದಿದೆ, ಆದರೆ ಅದು ಸಮಯ-ವ್ಯತ್ಯಾಸವಾಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ರಚಿಸಲು ಮಾತ್ರ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಕೆಲಸ ಮತ್ತು ಆರಂಭಿಕ ವಿಂಡ್ಗಳು ಪರಸ್ಪರ ಲಂಬ ಕೋನಗಳಲ್ಲಿ ಸ್ಟೇಟರ್ನಲ್ಲಿ ನೆಲೆಗೊಂಡಿವೆ, ಮತ್ತು ಕೆಲಸದ ಅಂಕುಡೊಂಕಾದವು ಆರಂಭಿಕ ಅಂಕುಡೊಂಕಾದ ಎರಡು ಪಟ್ಟು ಹೆಚ್ಚು ಸ್ಲಾಟ್ಗಳನ್ನು ಆಕ್ರಮಿಸುತ್ತದೆ.
ಪ್ರಾರಂಭವಾಗುವ ಸಮಯದಲ್ಲಿ, ಅಂತಹ ಮೋಟರ್ ಎರಡು-ಹಂತವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ ಮತ್ತು ನಂತರ ಏಕ-ಹಂತದ ಕಾರ್ಯಾಚರಣೆಯ ಮೋಡ್ಗೆ ಬದಲಾಗುತ್ತದೆ ಎಂದು ನಾವು ಹೇಳಬಹುದು. ಏಕ-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ನ ರೋಟರ್ ಅತ್ಯಂತ ಸಾಮಾನ್ಯವಾದ ನಿರ್ಮಾಣವಾಗಿದೆ - ಅಳಿಲು ಕೇಜ್ (ಅಳಿಲು ಕೇಜ್) ಅಥವಾ ಸಿಲಿಂಡರಾಕಾರದ (ಟೊಳ್ಳಾದ).
ಸ್ಟೇಟರ್ನಲ್ಲಿ ಯಾವುದೇ ಸ್ಟಾರ್ಟರ್ ವಿಂಡಿಂಗ್ ಇಲ್ಲದಿದ್ದರೆ ಅಥವಾ ಅದು ಇತ್ತು ಆದರೆ ಬಳಸದಿದ್ದರೆ ಏನು. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಮೋಟಾರು ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಗೊಂಡಾಗ, ಕೆಲಸದ ಸುರುಳಿಯಲ್ಲಿ ಮಿಡಿಯುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವು ಕಾಣಿಸಿಕೊಳ್ಳುತ್ತದೆ, ಮತ್ತು ರೋಟರ್ ಬದಲಾಗುತ್ತಿರುವ ಮ್ಯಾಗ್ನೆಟಿಕ್ ಫ್ಲಕ್ಸ್ನ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಬೀಳುತ್ತದೆ.
ಆದರೆ ರೋಟರ್ ಆರಂಭದಲ್ಲಿ ಸ್ಥಾಯಿಯಾಗಿದ್ದರೆ ಮತ್ತು ನಾವು ಇದ್ದಕ್ಕಿದ್ದಂತೆ ವರ್ಕಿಂಗ್ ಕಾಯಿಲ್ಗೆ ಪರ್ಯಾಯ ಪ್ರವಾಹವನ್ನು ಅನ್ವಯಿಸಿದರೆ, ರೋಟರ್ ಅದರ ಸ್ಥಳದಿಂದ ಚಲಿಸುವುದಿಲ್ಲ, ಏಕೆಂದರೆ ಒಟ್ಟು ಟಾರ್ಕ್ (ಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ಮತ್ತು ಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ) ಶೂನ್ಯವಾಗಿರುತ್ತದೆ, ಆದರೆ ಇಎಮ್ಎಫ್ ಪ್ರೇರಿತವಾಗಿದೆ. ರೋಟರ್ ಮತ್ತು ತಿರುಗುವಿಕೆಗೆ ಯಾವುದೇ ಕಾರಣವಿಲ್ಲ ಏಕೆಂದರೆ ಆಂಪಿಯರ್ನ ಹೊರಹೊಮ್ಮುವ ಶಕ್ತಿಗಳು ಪರಸ್ಪರ ರದ್ದುಗೊಳಿಸುತ್ತವೆ.
ಇದು ಸಂಪೂರ್ಣವಾಗಿ ವಿಭಿನ್ನ ವಿಷಯವಾಗಿದೆ, ರೋಟರ್ ಅನ್ನು ತಳ್ಳಿದರೆ, ಅದು ಆರಂಭಿಕ ತಳ್ಳುವಿಕೆಯಂತೆಯೇ ಅದೇ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗುವುದನ್ನು ಮುಂದುವರಿಸುತ್ತದೆ, ಏಕೆಂದರೆ ಈಗ, ವಿದ್ಯುತ್ಕಾಂತೀಯ ಪ್ರಚೋದನೆಯ ನಿಯಮದ ಪ್ರಕಾರ ಮಾತ್ರವಲ್ಲದೆ, ರೋಟರ್ನಲ್ಲಿ ಇಎಮ್ಎಫ್ ಅನ್ನು ಪ್ರಚೋದಿಸಲಾಗುತ್ತದೆ ಮತ್ತು, ಅಂತೆಯೇ, ಪ್ರವಾಹಗಳು ಉದ್ಭವಿಸುತ್ತವೆ, ಇದು ಆಂಪಿಯರ್ನ ನಿಯಮದ ಪ್ರಕಾರ ಕಾಂತೀಯ ಕ್ಷೇತ್ರದಿಂದ ಹಿಮ್ಮೆಟ್ಟಿಸುತ್ತದೆ, ಆದರೆ (ರೋಟರ್ ಈಗಾಗಲೇ ತಿರುಗುವಿಕೆಯನ್ನು ಹೊಂದಿರುವುದರಿಂದ) ತಳ್ಳುವ ದಿಕ್ಕಿನಲ್ಲಿ ಪರಿಣಾಮವಾಗಿ ಟಾರ್ಕ್ ತಳ್ಳುವ ದಿಕ್ಕಿನ ವಿರುದ್ಧ ಟಾರ್ಕ್ಗಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ . ಪರಿಣಾಮವಾಗಿ, ನಾವು ರೋಟರ್ನ ನಿರಂತರ ತಿರುಗುವಿಕೆಯನ್ನು ಪಡೆಯುತ್ತೇವೆ.
ಆರಂಭಿಕ ಅಂಕುಡೊಂಕಾದ ಆರಂಭಿಕ ಕ್ಷಣದಲ್ಲಿ ರೋಟರ್ ಅನ್ನು ತಳ್ಳಲು, ಅದು ಕೆಲಸ ಮಾಡುವ ವಿಂಡಿಂಗ್ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ಸ್ಥಳಾಂತರಗೊಳ್ಳುವುದು ಮಾತ್ರವಲ್ಲ, ಅದರಲ್ಲಿರುವ ಪ್ರವಾಹವನ್ನು ಕೆಲಸದ ಅಂಕುಡೊಂಕಾದ ಪ್ರವಾಹಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಹಂತ ಹಂತವಾಗಿ ಬದಲಾಯಿಸಬೇಕು, ನಂತರ ಈ ಎರಡು ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳ ಸಂಯೋಜಿತ ಕ್ರಿಯೆಯು ಪಲ್ಸೇಟಿಂಗ್ ಕಾಂತೀಯ ಕ್ಷೇತ್ರಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ, ಆದರೆ ಈಗಾಗಲೇ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ. ಮತ್ತು ಏಕ-ಹಂತದ ಮೋಟರ್ನ ಪ್ರಾರಂಭದ ಸಮಯದಲ್ಲಿ ರೋಟರ್ ಅನ್ನು ವೇಗಗೊಳಿಸಲು ಇದು ನಿಖರವಾಗಿ ಅಗತ್ಯವಾಗಿರುತ್ತದೆ.
ಆರಂಭಿಕ ಅಂಕುಡೊಂಕಾದ ಪ್ರವಾಹವನ್ನು ಹಂತ-ಶಿಫ್ಟ್ ಮಾಡಲು, ಅಗತ್ಯವಿರುವ ಕೆಪಾಸಿಟನ್ಸ್ನ ಕೆಪಾಸಿಟರ್ ಅನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ, ಆರಂಭಿಕ ಅಂಕುಡೊಂಕಾದ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕಗೊಳ್ಳುತ್ತದೆ ಮತ್ತು 90 ಡಿಗ್ರಿಗಳ ಹಂತದ ಶಿಫ್ಟ್ ಅನ್ನು ರಚಿಸುತ್ತದೆ. ವಿಭಜಿತ ಹಂತದ ಮೋಟಾರ್ಗಳಿಗೆ ಇದು ಪ್ರಮಾಣಿತ ಪರಿಹಾರವಾಗಿದೆ.
ಮೋಟಾರು ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಗೊಂಡ ತಕ್ಷಣ, ಆಪರೇಟರ್ ಸ್ವಿಚ್ ಬಟನ್ ಅನ್ನು ಒತ್ತುತ್ತಾನೆ, ಅದು ಕಾಯಿಲ್ ಸ್ಟಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ಗೆ ಶಕ್ತಿಯನ್ನು ಪೂರೈಸುತ್ತದೆ ಮತ್ತು ನೆಟ್ವರ್ಕ್ನ ನಿರ್ದಿಷ್ಟ ಆವರ್ತನದಲ್ಲಿ ರೇಟಿಂಗ್ಗೆ ಅನುಗುಣವಾಗಿ ವೇಗವು ಅಗತ್ಯವಿರುವ ಮೌಲ್ಯವನ್ನು ತಲುಪಿದ ತಕ್ಷಣ, ಬಟನ್ ಬಿಡುಗಡೆಯಾಗಿದೆ.
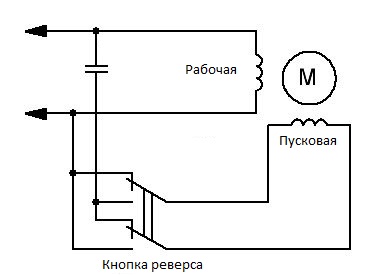
ಏಕ-ಹಂತದ ಕೆಪಾಸಿಟರ್-ಪ್ರಾರಂಭದ ಮೋಟಾರಿನ ಹಿಮ್ಮುಖವನ್ನು ಪಡೆಯಲು, ಆರಂಭಿಕ ನಾಡಿಯನ್ನು ಮೂಲತಃ ಸರಬರಾಜು ಮಾಡಲಾದ ದಿಕ್ಕಿನಲ್ಲಿ ಬೇರೆ ಕಡೆಗೆ ಸರಬರಾಜು ಮಾಡುವ ಸ್ಥಿತಿಯನ್ನು ಒದಗಿಸುವುದು ಸಾಕು. ಕೆಲಸ ಮಾಡುವ ಮತ್ತು ಪ್ರಾರಂಭಿಸುವ ವಿಂಡ್ಗಳಲ್ಲಿ ಹಂತದ ತಿರುಗುವಿಕೆಯ ಸಂಬಂಧಿತ ಕ್ರಮವನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಇದನ್ನು ಸಾಧಿಸಲಾಗುತ್ತದೆ.
ಈ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು, ಕೆಲಸ ಮಾಡುವ ಅಥವಾ ಪ್ರಾರಂಭವಾಗುವ ಸುರುಳಿಯನ್ನು ಬದಲಾಯಿಸುವುದು ಅವಶ್ಯಕ, ಅಂದರೆ, ಅದರ ಟರ್ಮಿನಲ್ಗಳ ಸಂಪರ್ಕದ «ಧ್ರುವೀಯತೆ» ನೆಟ್ವರ್ಕ್ಗೆ ಅಥವಾ ನೆಟ್ವರ್ಕ್ಗೆ ಮತ್ತು ಕೆಪಾಸಿಟರ್ಗೆ ಬದಲಾಯಿಸಲು. ಇದನ್ನು ಮಾಡಲು ಸುಲಭವಾಗಿದೆ ಏಕೆಂದರೆ ಸಿಂಗಲ್ ಫೇಸ್ ಮೋಟರ್ನಲ್ಲಿ ಟರ್ಮಿನಲ್ ಬ್ಲಾಕ್ ಇದ್ದು, ಪ್ರಾರಂಭ ಮತ್ತು ಚಾಲನೆಯಲ್ಲಿರುವ ವಿಂಡ್ಗಳ ಪ್ರತಿಯೊಂದು ತುದಿಗಳನ್ನು ಹೊರತರಲಾಗುತ್ತದೆ. ಚಾಲನೆಯಲ್ಲಿರುವ ಸುರುಳಿಯು ಆರಂಭಿಕ ಸುರುಳಿಗಿಂತ ಕಡಿಮೆ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧವನ್ನು ಹೊಂದಿದೆ, ಆದ್ದರಿಂದ ಮಲ್ಟಿಮೀಟರ್ನೊಂದಿಗೆ ಕಂಡುಹಿಡಿಯುವುದು ಸುಲಭ. ಎರಡು-ಪೋಲ್ ಕ್ಷಣಿಕ ಸ್ವಿಚ್ನಲ್ಲಿ ಸ್ಟಾರ್ಟರ್ ಕಾಯಿಲ್ ತಂತಿಗಳನ್ನು ಹಾಕುವುದು ಉತ್ತಮ ಪರಿಹಾರವಾಗಿದೆ.