ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದಲ್ಲಿ ಎಲೆಕ್ಟ್ರಾನ್
ಎಲೆಕ್ಟ್ರಿಕಲ್ ಕ್ಷೇತ್ರದಲ್ಲಿ ಎಲೆಕ್ಟ್ರಾನ್ ಚಲನೆಯು ಎಲೆಕ್ಟ್ರಿಕಲ್ ಎಂಜಿನಿಯರಿಂಗ್ನ ಪ್ರಮುಖ ಭೌತಿಕ ಪ್ರಕ್ರಿಯೆಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ. ಫಿಗರ್ ಇದು ನಿರ್ವಾತದಲ್ಲಿ ಹೇಗೆ ಸಂಭವಿಸುತ್ತದೆ ಎಂದು ನೋಡೋಣ. ಏಕರೂಪದ ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದಲ್ಲಿ ಕ್ಯಾಥೋಡ್ನಿಂದ ಆನೋಡ್ಗೆ ಎಲೆಕ್ಟ್ರಾನ್ ಚಲನೆಯ ಉದಾಹರಣೆಯನ್ನು ನಾವು ಮೊದಲು ಪರಿಗಣಿಸೋಣ.

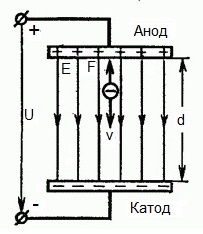
ಕೆಳಗಿನ ಚಿತ್ರವು ಪರಿಸ್ಥಿತಿಯನ್ನು ತೋರಿಸುತ್ತದೆ ಎಲೆಕ್ಟ್ರಾನ್ ಋಣಾತ್ಮಕ ವಿದ್ಯುದ್ವಾರವನ್ನು (ಕ್ಯಾಥೋಡ್) ಅತ್ಯಲ್ಪವಾಗಿ ಸಣ್ಣ ಆರಂಭಿಕ ವೇಗದೊಂದಿಗೆ (ಶೂನ್ಯಕ್ಕೆ ಒಲವು) ಬಿಡುತ್ತದೆ ಮತ್ತು ಪ್ರವೇಶಿಸುತ್ತದೆ ಏಕರೂಪದ ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದಲ್ಲಿಎರಡು ವಿದ್ಯುದ್ವಾರಗಳ ನಡುವೆ ಇರುತ್ತದೆ.
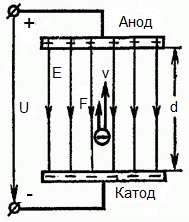
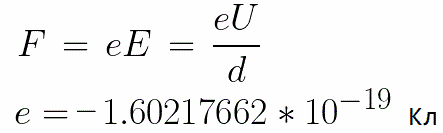
ವಿದ್ಯುದ್ವಾರಗಳಿಗೆ ಸ್ಥಿರವಾದ ವೋಲ್ಟೇಜ್ U ಅನ್ನು ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ, ಮತ್ತು ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರವು ಅನುಗುಣವಾದ ಶಕ್ತಿಯನ್ನು ಹೊಂದಿರುತ್ತದೆ E. ವಿದ್ಯುದ್ವಾರಗಳ ನಡುವಿನ ಅಂತರವು d ಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, F ಬಲವು ಕ್ಷೇತ್ರದ ಬದಿಯಿಂದ ಎಲೆಕ್ಟ್ರಾನ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಇದು ಎಲೆಕ್ಟ್ರಾನ್ನ ಚಾರ್ಜ್ ಮತ್ತು ಕ್ಷೇತ್ರದ ಬಲಕ್ಕೆ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ:
ಎಲೆಕ್ಟ್ರಾನ್ ಋಣಾತ್ಮಕ ಆವೇಶವನ್ನು ಹೊಂದಿರುವುದರಿಂದ, ಈ ಬಲವು ಕ್ಷೇತ್ರ ಸಾಮರ್ಥ್ಯದ ವೆಕ್ಟರ್ ಇ ವಿರುದ್ಧ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ. ಅದರಂತೆ, ಎಲೆಕ್ಟ್ರಾನ್ ಅನ್ನು ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದಿಂದ ಆ ದಿಕ್ಕಿನಲ್ಲಿ ವೇಗಗೊಳಿಸಲಾಗುತ್ತದೆ.
ಎಲೆಕ್ಟ್ರಾನ್ ಅನುಭವಿಸುವ ವೇಗವರ್ಧನೆಯು ಅದರ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ F ಬಲದ ಪ್ರಮಾಣಕ್ಕೆ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ ಮತ್ತು ಎಲೆಕ್ಟ್ರಾನ್ ದ್ರವ್ಯರಾಶಿಗೆ ವಿಲೋಮ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ.ಕ್ಷೇತ್ರವು ಏಕರೂಪವಾಗಿರುವುದರಿಂದ, ನಿರ್ದಿಷ್ಟ ಚಿತ್ರಕ್ಕಾಗಿ ವೇಗವರ್ಧನೆಯು ಹೀಗೆ ವ್ಯಕ್ತಪಡಿಸಬಹುದು:
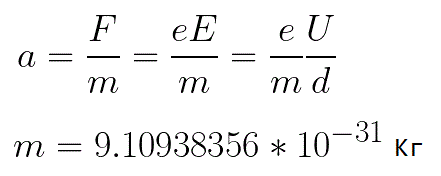
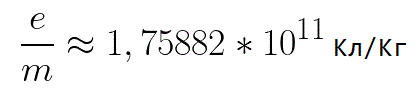
ಈ ಸೂತ್ರದಲ್ಲಿ, ಎಲೆಕ್ಟ್ರಾನ್ನ ಚಾರ್ಜ್ನ ಅನುಪಾತವು ಅದರ ದ್ರವ್ಯರಾಶಿಗೆ ಎಲೆಕ್ಟ್ರಾನ್ನ ನಿರ್ದಿಷ್ಟ ಚಾರ್ಜ್ ಆಗಿದೆ, ಇದು ಒಂದು ಭೌತಿಕ ಸ್ಥಿರಾಂಕವಾಗಿದೆ:
ಆದ್ದರಿಂದ ಎಲೆಕ್ಟ್ರಾನ್ ವೇಗವರ್ಧಕ ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದಲ್ಲಿದೆ ಏಕೆಂದರೆ ಆರಂಭಿಕ ವೇಗ v0 ನ ದಿಕ್ಕು ಕ್ಷೇತ್ರದ ಬದಿಯಲ್ಲಿರುವ F ಬಲದ ದಿಕ್ಕಿನೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತದೆ ಮತ್ತು ಆದ್ದರಿಂದ ಎಲೆಕ್ಟ್ರಾನ್ ಏಕರೂಪವಾಗಿ ಚಲಿಸುತ್ತದೆ. ಯಾವುದೇ ಅಡೆತಡೆಗಳಿಲ್ಲದಿದ್ದರೆ, ಅದು ವಿದ್ಯುದ್ವಾರಗಳ ನಡುವೆ ಮಾರ್ಗ d ಅನ್ನು ಪ್ರಯಾಣಿಸುತ್ತದೆ ಮತ್ತು ನಿರ್ದಿಷ್ಟ ವೇಗದೊಂದಿಗೆ ಆನೋಡ್ (ಧನಾತ್ಮಕ ವಿದ್ಯುದ್ವಾರ) ಅನ್ನು ತಲುಪುತ್ತದೆ. ಎಲೆಕ್ಟ್ರಾನ್ ಆನೋಡ್ ಅನ್ನು ತಲುಪುವ ಕ್ಷಣದಲ್ಲಿ, ಅದರ ಚಲನ ಶಕ್ತಿಯು ಇದಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಸಮಾನವಾಗಿರುತ್ತದೆ:
ಸಂಪೂರ್ಣ ಹಾದಿಯಲ್ಲಿ d ಎಲೆಕ್ಟ್ರಾನ್ ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದ ಬಲಗಳಿಂದ ವೇಗವರ್ಧಿತವಾಗಿರುವುದರಿಂದ, ಕ್ಷೇತ್ರದ ಬದಿಯಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲದಿಂದ ಮಾಡಿದ ಕೆಲಸದ ಪರಿಣಾಮವಾಗಿ ಇದು ಈ ಚಲನ ಶಕ್ತಿಯನ್ನು ಪಡೆಯುತ್ತದೆ. ಈ ಕೆಲಸವು ಇದಕ್ಕೆ ಸಮಾನವಾಗಿದೆ:

ನಂತರ ಕ್ಷೇತ್ರದಲ್ಲಿ ಚಲಿಸುವ ಎಲೆಕ್ಟ್ರಾನ್ನಿಂದ ಪಡೆದ ಚಲನ ಶಕ್ತಿಯನ್ನು ಈ ಕೆಳಗಿನಂತೆ ಕಾಣಬಹುದು:
ಅಂದರೆ, ಯು ಸಂಭಾವ್ಯ ವ್ಯತ್ಯಾಸದೊಂದಿಗೆ ಬಿಂದುಗಳ ನಡುವೆ ಎಲೆಕ್ಟ್ರಾನ್ ಅನ್ನು ವೇಗಗೊಳಿಸಲು ಕ್ಷೇತ್ರ ಶಕ್ತಿಗಳ ಕೆಲಸಕ್ಕಿಂತ ಹೆಚ್ಚೇನೂ ಅಲ್ಲ.
ಅಂತಹ ಸಂದರ್ಭಗಳಲ್ಲಿ, ಎಲೆಕ್ಟ್ರಾನ್ನ ಶಕ್ತಿಯನ್ನು ವ್ಯಕ್ತಪಡಿಸಲು, "ಎಲೆಕ್ಟ್ರಾನ್ ವೋಲ್ಟ್" ನಂತಹ ಅಳತೆಯ ಘಟಕವನ್ನು ಬಳಸಲು ಅನುಕೂಲಕರವಾಗಿದೆ, ಇದು 1 ವೋಲ್ಟ್ ವೋಲ್ಟೇಜ್ನಲ್ಲಿ ಎಲೆಕ್ಟ್ರಾನ್ ಶಕ್ತಿಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಮತ್ತು ಎಲೆಕ್ಟ್ರಾನ್ ಚಾರ್ಜ್ ಸ್ಥಿರವಾಗಿರುವುದರಿಂದ, 1 ಎಲೆಕ್ಟ್ರೋವೋಲ್ಟ್ ಸಹ ಸ್ಥಿರ ಮೌಲ್ಯವಾಗಿದೆ:

ಹಿಂದಿನ ಸೂತ್ರದಿಂದ, ವೇಗವರ್ಧಕ ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದಲ್ಲಿ ಚಲಿಸುವಾಗ ಅದರ ಹಾದಿಯಲ್ಲಿ ಯಾವುದೇ ಹಂತದಲ್ಲಿ ಎಲೆಕ್ಟ್ರಾನ್ನ ವೇಗವನ್ನು ನೀವು ಸುಲಭವಾಗಿ ನಿರ್ಧರಿಸಬಹುದು, ವೇಗವನ್ನು ಹೆಚ್ಚಿಸುವಾಗ ಅದು ಹಾದುಹೋಗುವ ಸಂಭಾವ್ಯ ವ್ಯತ್ಯಾಸವನ್ನು ಮಾತ್ರ ತಿಳಿದುಕೊಳ್ಳಬಹುದು:

ನಾವು ನೋಡುವಂತೆ, ವೇಗವರ್ಧಕ ಕ್ಷೇತ್ರದಲ್ಲಿ ಎಲೆಕ್ಟ್ರಾನ್ನ ವೇಗವು ಅದರ ಪಥದ ಅಂತಿಮ ಬಿಂದು ಮತ್ತು ಪ್ರಾರಂಭದ ಬಿಂದುವಿನ ನಡುವಿನ ಸಂಭಾವ್ಯ ವ್ಯತ್ಯಾಸ U ಅನ್ನು ಮಾತ್ರ ಅವಲಂಬಿಸಿರುತ್ತದೆ.
ಎಲೆಕ್ಟ್ರಾನ್ ಕ್ಯಾಥೋಡ್ನಿಂದ ಅತ್ಯಲ್ಪ ವೇಗದಲ್ಲಿ ಚಲಿಸಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ ಮತ್ತು ಕ್ಯಾಥೋಡ್ ಮತ್ತು ಆನೋಡ್ ನಡುವಿನ ವೋಲ್ಟೇಜ್ 400 ವೋಲ್ಟ್ ಆಗಿದೆ ಎಂದು ಕಲ್ಪಿಸಿಕೊಳ್ಳಿ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಆನೋಡ್ ಅನ್ನು ತಲುಪುವ ಕ್ಷಣದಲ್ಲಿ, ಅದರ ವೇಗವು ಇದಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ:

ಎಲೆಕ್ಟ್ರೋಡ್ಗಳ ನಡುವಿನ ದೂರ d ಅನ್ನು ಎಲೆಕ್ಟ್ರಾನ್ಗೆ ಪ್ರಯಾಣಿಸಲು ಬೇಕಾದ ಸಮಯವನ್ನು ನಿರ್ಧರಿಸುವುದು ಸಹ ಸುಲಭವಾಗಿದೆ. ವಿಶ್ರಾಂತಿಯಿಂದ ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಯೊಂದಿಗೆ, ಸರಾಸರಿ ವೇಗವು ಅಂತಿಮ ವೇಗದ ಅರ್ಧದಷ್ಟು ಕಂಡುಬರುತ್ತದೆ, ನಂತರ ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದಲ್ಲಿ ವೇಗವರ್ಧಿತ ಹಾರಾಟದ ಸಮಯವು ಇದಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ:
ಎಲೆಕ್ಟ್ರಾನ್ ಕ್ಷೀಣಿಸುತ್ತಿರುವ ಏಕರೂಪದ ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದಲ್ಲಿ ಚಲಿಸಿದಾಗ ನಾವು ಈಗ ಒಂದು ಉದಾಹರಣೆಯನ್ನು ಪರಿಗಣಿಸೋಣ, ಅಂದರೆ, ಕ್ಷೇತ್ರವು ಮೊದಲಿನಂತೆ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ, ಆದರೆ ಎಲೆಕ್ಟ್ರಾನ್ ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ - ಆನೋಡ್ನಿಂದ ಕ್ಯಾಥೋಡ್ಗೆ.
ಎಲೆಕ್ಟ್ರಾನ್ ಕೆಲವು ಆರಂಭಿಕ ವೇಗ v ಯೊಂದಿಗೆ ಆನೋಡ್ ಅನ್ನು ಬಿಟ್ಟು ಕ್ಯಾಥೋಡ್ನ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸಲು ಪ್ರಾರಂಭಿಸಿತು ಎಂದು ಭಾವಿಸೋಣ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದ ಬದಿಯಿಂದ ಎಲೆಕ್ಟ್ರಾನ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಎಫ್ ಬಲವನ್ನು ವಿದ್ಯುತ್ ತೀವ್ರತೆಯ ವೆಕ್ಟರ್ ಇ ವಿರುದ್ಧ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ - ಕ್ಯಾಥೋಡ್ನಿಂದ ಆನೋಡ್ಗೆ.
ಇದು ಎಲೆಕ್ಟ್ರಾನ್ನ ಆರಂಭಿಕ ವೇಗವನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ, ಅಂದರೆ ಕ್ಷೇತ್ರವು ಎಲೆಕ್ಟ್ರಾನ್ ಅನ್ನು ನಿಧಾನಗೊಳಿಸುತ್ತದೆ. ಇದರರ್ಥ ಈ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಎಲೆಕ್ಟ್ರಾನ್ ಏಕರೂಪವಾಗಿ ಮತ್ತು ಏಕರೂಪವಾಗಿ ನಿಧಾನವಾಗಿ ಚಲಿಸಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ. ಪರಿಸ್ಥಿತಿಯನ್ನು ಈ ಕೆಳಗಿನಂತೆ ವಿವರಿಸಲಾಗಿದೆ: "ಎಲೆಕ್ಟ್ರಾನ್ ನಿಧಾನಗೊಳ್ಳುವ ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದಲ್ಲಿ ಚಲಿಸುತ್ತದೆ."
ಆನೋಡ್ನಿಂದ, ಎಲೆಕ್ಟ್ರಾನ್ ಶೂನ್ಯವಲ್ಲದ ಚಲನ ಶಕ್ತಿಯೊಂದಿಗೆ ಚಲಿಸಲು ಪ್ರಾರಂಭಿಸಿತು, ಇದು ಕುಸಿತದ ಸಮಯದಲ್ಲಿ ಕಡಿಮೆಯಾಗಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ, ಏಕೆಂದರೆ ಶಕ್ತಿಯು ಈಗ ಎಲೆಕ್ಟ್ರಾನ್ನಲ್ಲಿನ ಕ್ಷೇತ್ರದಿಂದ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲವನ್ನು ಜಯಿಸಲು ವ್ಯಯಿಸಲ್ಪಟ್ಟಿದೆ.

ಆನೋಡ್ನಿಂದ ನಿರ್ಗಮಿಸುವ ಎಲೆಕ್ಟ್ರಾನ್ನ ಆರಂಭಿಕ ಚಲನ ಶಕ್ತಿಯು ತಕ್ಷಣವೇ ಕ್ಯಾಥೋಡ್ನಿಂದ ಆನೋಡ್ಗೆ ಚಲಿಸುವಾಗ ಎಲೆಕ್ಟ್ರಾನ್ ಅನ್ನು ವೇಗಗೊಳಿಸಲು ಕ್ಷೇತ್ರದಿಂದ ವ್ಯಯಿಸಬೇಕಾದ ಶಕ್ತಿಗಿಂತ ಹೆಚ್ಚಿದ್ದರೆ (ಮೊದಲ ಉದಾಹರಣೆಯಂತೆ), ಆಗ ಎಲೆಕ್ಟ್ರಾನ್ d ದೂರವನ್ನು ಕ್ರಮಿಸಿ ಮತ್ತು ಬ್ರೇಕಿಂಗ್ ಹೊರತಾಗಿಯೂ ಅಂತಿಮವಾಗಿ ಕ್ಯಾಥೋಡ್ ಅನ್ನು ತಲುಪುತ್ತದೆ.

ಎಲೆಕ್ಟ್ರಾನ್ನ ಆರಂಭಿಕ ಚಲನ ಶಕ್ತಿಯು ಈ ನಿರ್ಣಾಯಕ ಮೌಲ್ಯಕ್ಕಿಂತ ಕಡಿಮೆಯಿದ್ದರೆ, ಎಲೆಕ್ಟ್ರಾನ್ ಕ್ಯಾಥೋಡ್ ಅನ್ನು ತಲುಪುವುದಿಲ್ಲ. ಒಂದು ನಿರ್ದಿಷ್ಟ ಹಂತದಲ್ಲಿ ಅದು ನಿಲ್ಲುತ್ತದೆ, ನಂತರ ಆನೋಡ್ಗೆ ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತ ಚಲನೆಯನ್ನು ಪ್ರಾರಂಭಿಸುತ್ತದೆ. ಪರಿಣಾಮವಾಗಿ, ಕ್ಷೇತ್ರವು ಅದನ್ನು ನಿಲ್ಲಿಸುವ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಖರ್ಚು ಮಾಡಿದ ಶಕ್ತಿಯನ್ನು ಹಿಂದಿರುಗಿಸುತ್ತದೆ.
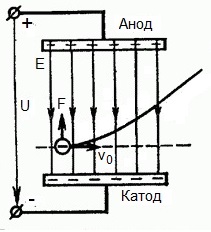
ಆದರೆ ಬಲ ಕೋನಗಳಲ್ಲಿ ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದ ಕ್ರಿಯೆಯ ಪ್ರದೇಶದಲ್ಲಿ ಎಲೆಕ್ಟ್ರಾನ್ ವೇಗ v0 ನೊಂದಿಗೆ ಹಾರಿದರೆ ಏನು? ನಿಸ್ಸಂಶಯವಾಗಿ, ಈ ಪ್ರದೇಶದಲ್ಲಿ ಕ್ಷೇತ್ರದ ಬದಿಯಲ್ಲಿರುವ ಬಲವು ಕ್ಯಾಥೋಡ್ನಿಂದ ಆನೋಡ್ಗೆ ಎಲೆಕ್ಟ್ರಾನ್ಗೆ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ, ಅಂದರೆ, ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರದ ಶಕ್ತಿ ವೆಕ್ಟರ್ ಇ ವಿರುದ್ಧ.
ಇದರರ್ಥ ಈಗ ಎಲೆಕ್ಟ್ರಾನ್ ಚಲನೆಯ ಎರಡು ಘಟಕಗಳನ್ನು ಹೊಂದಿದೆ: ಮೊದಲನೆಯದು - ಕ್ಷೇತ್ರಕ್ಕೆ ಲಂಬವಾಗಿರುವ ವೇಗ v0, ಎರಡನೆಯದು - ಆನೋಡ್ ಕಡೆಗೆ ನಿರ್ದೇಶಿಸಲಾದ ಕ್ಷೇತ್ರದ ಬದಿಯಿಂದ ಬಲದ ಕ್ರಿಯೆಯ ಅಡಿಯಲ್ಲಿ ಏಕರೂಪವಾಗಿ ವೇಗಗೊಳ್ಳುತ್ತದೆ.
ಕ್ರಿಯೆಯ ಕ್ಷೇತ್ರಕ್ಕೆ ಹಾರಿಹೋದ ನಂತರ, ಎಲೆಕ್ಟ್ರಾನ್ ಪ್ಯಾರಾಬೋಲಿಕ್ ಪಥದಲ್ಲಿ ಚಲಿಸುತ್ತದೆ ಎಂದು ಅದು ತಿರುಗುತ್ತದೆ. ಆದರೆ ಕ್ಷೇತ್ರದ ಕ್ರಿಯೆಯ ಪ್ರದೇಶದಿಂದ ಹಾರಿಹೋದ ನಂತರ, ಎಲೆಕ್ಟ್ರಾನ್ ಸರಳ ರೇಖೆಯ ಪಥದಲ್ಲಿ ಜಡತ್ವದಿಂದ ಅದರ ಏಕರೂಪದ ಚಲನೆಯನ್ನು ಮುಂದುವರಿಸುತ್ತದೆ.