ಬಹು-ವೇಗದ ಏಕ-ಹಂತದ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳು
ಏಕ-ಹಂತದ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ಗಳು ವೇಗ ನಿಯಂತ್ರಣವಿಲ್ಲದೆ ಕಾರ್ಯಾಚರಣೆಗೆ ಲಭ್ಯವಿದೆ. ವೇಗವನ್ನು ಬದಲಾಯಿಸಲು ಅಗತ್ಯವಾದ ಸಂದರ್ಭಗಳಲ್ಲಿ, ಪೋಲ್ ಜೋಡಿಗಳ ಸಂಖ್ಯೆಯಲ್ಲಿ ಬದಲಾವಣೆಯೊಂದಿಗೆ ಮೋಟಾರ್ಗಳನ್ನು ಹೆಚ್ಚಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
ಸಾಮಾನ್ಯವಾಗಿ, ಏಕ-ಹಂತದ ಮೋಟರ್ನ ವೇಗವನ್ನು ಬದಲಾಯಿಸಲು 3 ವಿಭಿನ್ನ ವಿಧಾನಗಳನ್ನು ಅನ್ವಯಿಸಬಹುದು. ಒಂದು ಸ್ಟೇಟರ್ 2 ಸಂಪೂರ್ಣ ಸೆಟ್ ವಿಂಡ್ಗಳನ್ನು ಹೊಂದಿರುತ್ತದೆ, ಪ್ರತಿಯೊಂದೂ ವಿಭಿನ್ನ ಸಂಖ್ಯೆಯ ಧ್ರುವಗಳಿಗೆ. ನಂತರ, ಸಮೀಕರಣ 2 ರ ಪ್ರಕಾರ, ಒಂದೇ ಗ್ರಿಡ್ ಆವರ್ತನದಲ್ಲಿ ವಿಭಿನ್ನ ವೇಗಗಳನ್ನು ಪಡೆಯಲಾಗುತ್ತದೆ. ಇತರ 2 ವಿಧಾನಗಳು ಮೋಟಾರ್ ಟರ್ಮಿನಲ್ಗಳಲ್ಲಿ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಬದಲಾಯಿಸುವುದು ಅಥವಾ ಅದರಿಂದ ಕವಲೊಡೆಯುವ ಮೂಲಕ ಮುಖ್ಯ ಅಂಕುಡೊಂಕಾದ ಮೇಲೆ ತಿರುವುಗಳ ಸಂಖ್ಯೆಯನ್ನು ಬದಲಾಯಿಸುವುದು.
2 ಸೆಟ್ ವಿಂಡ್ಗಳ ಬಳಕೆಯನ್ನು ಆಧರಿಸಿದ ವಿಧಾನವನ್ನು ಮುಖ್ಯವಾಗಿ ವಿಭಜಿತ ಹಂತದ ಮೋಟಾರ್ಗಳು ಮತ್ತು ಕೆಪಾಸಿಟರ್ ಸ್ಟಾರ್ಟ್ ಮೋಟಾರ್ಗಳಿಗಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ವೋಲ್ಟೇಜ್ ಬದಲಾವಣೆ ಅಥವಾ ಥ್ರೆಡ್ ವಿಂಡ್ಗಳ ಬಳಕೆಯನ್ನು ಆಧರಿಸಿದ ವಿಧಾನಗಳನ್ನು ಮುಖ್ಯವಾಗಿ ಶಾಶ್ವತವಾಗಿ ಸ್ವಿಚ್ ಮಾಡಿದ ಕೆಪಾಸಿಟನ್ಸ್ ಹೊಂದಿರುವ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳಿಗಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.

ಪ್ರಸ್ತುತ, ಅವುಗಳನ್ನು ವಿವಿಧ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಚಾಲನೆ ಮಾಡಲು ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ ಬಹು-ವೇಗದ ಅಸಮಕಾಲಿಕ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳು (ಒಂದು ಸ್ಥಿರ-ಆನ್ ಸಾಮರ್ಥ್ಯದೊಂದಿಗೆ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳು)… ಈ ವಿಧದ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರುಗಳು ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಿಸಲು ಅಗತ್ಯವಿರುವ ಹೆಚ್ಚುವರಿ ಅಂಶಗಳ ಅಗತ್ಯವಿರುವುದಿಲ್ಲ, ಮತ್ತು ಶಾಫ್ಟ್ನ ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕನ್ನು ಸರಳವಾಗಿ ಬದಲಾಯಿಸಲು ಸಹ ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ. ಇದನ್ನು ಮಾಡಲು, ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಮುಖ್ಯ ಅಥವಾ ಸಹಾಯಕ ವಿಂಡ್ಗಳ ತುದಿಗಳನ್ನು ಬದಲಾಯಿಸಲು ಸಾಕು.
ವಿ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಿರುವ ಸುರುಳಿಗಳನ್ನು ಆನ್ ಮಾಡಲು ಮೂಲ ಸರ್ಕ್ಯೂಟ್ಗಳು. 1. ಅತ್ಯಂತ ವ್ಯಾಪಕವಾಗಿ ಕರೆಯಲ್ಪಡುವದು ವಿಂಡ್ಗಳ ಸಮಾನಾಂತರ ಸಂಪರ್ಕ (Fig. 1, a). ಚಿತ್ರದಿಂದ ನೋಡಬಹುದಾದಂತೆ, ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳನ್ನು ವಿದ್ಯುತ್ ಸರಬರಾಜಿಗೆ ಸಮಾನಾಂತರವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ. ಹಂತ-ಶಿಫ್ಟಿಂಗ್ ಕೆಪಾಸಿಟರ್ ಸಿ ಸಹಾಯಕ ವಿಂಡಿಂಗ್ನೊಂದಿಗೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ.
ಕೆಪಾಸಿಟರ್ನ ಕೆಪಾಸಿಟನ್ಸ್ನ ಮೌಲ್ಯವನ್ನು ಅಗತ್ಯವನ್ನು ಒದಗಿಸುವ ಷರತ್ತುಗಳಿಂದ ಆಯ್ಕೆ ಮಾಡಲಾಗುತ್ತದೆ ವಿದ್ಯುತ್ ಮೋಟಾರುಗಳ ಗುಣಲಕ್ಷಣಗಳು… ತಾತ್ವಿಕವಾಗಿ, ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳಲ್ಲಿ, ಧಾರಣವನ್ನು ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ ಆದ್ದರಿಂದ ನಾಮಮಾತ್ರದ ಮೋಡ್ನಲ್ಲಿ ಮುಖ್ಯ ಮತ್ತು ಸಹಾಯಕ ವಿಂಡ್ಗಳಲ್ಲಿನ ಪ್ರವಾಹಗಳ ಹಂತದ ಶಿಫ್ಟ್ 90 ° ಗೆ ಹತ್ತಿರದಲ್ಲಿದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಕಾರ್ಯಾಚರಣಾ ಹಂತದಲ್ಲಿ ಎಂಜಿನ್ ಅತ್ಯುತ್ತಮ ಶಕ್ತಿ ದಕ್ಷತೆಯನ್ನು ಹೊಂದಿದೆ, ಆದರೆ ಪ್ರಾರಂಭಗಳು ಹದಗೆಡುತ್ತವೆ.
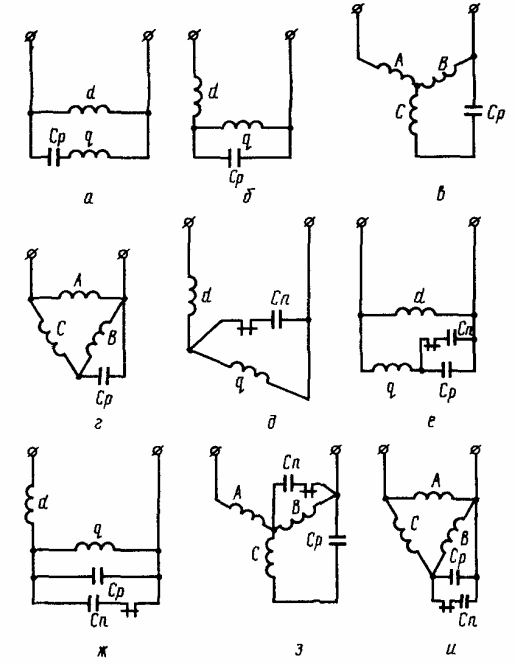
ಅಕ್ಕಿ. 1. ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳ ವಿಂಡ್ಗಳನ್ನು ಸಂಪರ್ಕಿಸುವ ಯೋಜನೆಗಳು
ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳ ತಿರುಗುವಿಕೆಯ ಆವರ್ತನದಲ್ಲಿನ ಬದಲಾವಣೆಯನ್ನು ಹೆಚ್ಚಾಗಿ ನಡೆಸಲಾಗುತ್ತದೆ ಪೋಲ್ ಜೋಡಿಗಳ ಸಂಖ್ಯೆಯನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ… ಈ ಉದ್ದೇಶಕ್ಕಾಗಿ, ವಿಭಿನ್ನ ಸಂಖ್ಯೆಯ ಧ್ರುವಗಳೊಂದಿಗೆ ಎರಡು ಸೆಟ್ ವಿಂಡ್ಗಳನ್ನು ಅಥವಾ ಒಂದು ಸೆಟ್, ಧ್ರುವಗಳ ಸಂಖ್ಯೆಯಲ್ಲಿ ಬದಲಾವಣೆಯೊಂದಿಗೆ ಸ್ಟೇಟರ್ನಲ್ಲಿ ಇರಿಸಲಾಗುತ್ತದೆ.
ಯಾವುದೇ ಗಮನಾರ್ಹ ಶ್ರೇಣಿಯ ವೇಗ ನಿಯಂತ್ರಣ ಅಗತ್ಯವಿಲ್ಲದ ಸಂದರ್ಭಗಳಲ್ಲಿ, ಸರಳವಾದ ವಿಧಾನವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ- ಕೆಲಸದ ಸುರುಳಿಯ ತಿರುವುಗಳ ಸಂಖ್ಯೆಯಲ್ಲಿ ಬದಲಾವಣೆ… ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಮುಖ್ಯ ವೋಲ್ಟೇಜ್ ಬದಲಾಗದೆ ಉಳಿದಿರುವಾಗ, ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಕಾಂತೀಯ ಹರಿವಿನ ಪ್ರಮಾಣ ಮತ್ತು, ಆದ್ದರಿಂದ, ವಿದ್ಯುತ್ಕಾಂತೀಯ ಕ್ಷಣ ಮತ್ತು ರೋಟರ್ನ ವೇಗವು ಬದಲಾಗುತ್ತದೆ.
ಥ್ರೆಡ್ ವಿಂಡ್ಗಳೊಂದಿಗೆ ಎರಡು-ವೇಗದ ಮೋಟಾರ್ಗಳು
ಏಕ-ಹಂತದ ಮೋಟರ್ನ ವೇಗವನ್ನು ಅದರ ಟರ್ಮಿನಲ್ಗಳಲ್ಲಿ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಅಥವಾ ಅದರ ದ್ವಿತೀಯ ಅಂಕುಡೊಂಕಾದ ತಿರುವುಗಳ ಸಂಖ್ಯೆಯನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಬದಲಾಯಿಸಬಹುದು ಎಂದು ಹಿಂದೆ ಹೇಳಲಾಗಿದೆ.ಮೊದಲ ವಿಧಾನಕ್ಕೆ ಆಟೋಟ್ರಾನ್ಸ್ಫಾರ್ಮರ್ನ ಅಗತ್ಯವಿರುತ್ತದೆ ಮತ್ತು ಇದನ್ನು ಮುಖ್ಯವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ ಶಾಫ್ಟ್ ಫ್ಯಾನ್ನೊಂದಿಗೆ ಕಂಡೆನ್ಸರ್ನಲ್ಲಿ ಶಾಶ್ವತವಾಗಿ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳು.
ಆಟೋಟ್ರಾನ್ಸ್ಫಾರ್ಮರ್ನೊಂದಿಗೆ ನೀವು 2 ಕ್ಕಿಂತ ಹೆಚ್ಚು ವೇಗವನ್ನು ಪಡೆಯಬಹುದು. ಮುಖ್ಯ ಅಂಕುಡೊಂಕಾದ ತಿರುವುಗಳ ಸಂಖ್ಯೆಯಲ್ಲಿನ ಬದಲಾವಣೆಯನ್ನು ಅದರಿಂದ ಕವಲೊಡೆಯುವ ಮೂಲಕ ಪಡೆಯಲಾಗುತ್ತದೆ. ನಂತರ ಸ್ಟೇಟರ್ 3 ವಿಂಡ್ಗಳನ್ನು ಹೊಂದಿದೆ: ಪ್ರಾಥಮಿಕ, ಮಧ್ಯಂತರ ಮತ್ತು ಸಹಾಯಕ. ಮೊದಲ 2 ಸುರುಳಿಗಳು ಒಂದೇ ಕಾಂತೀಯ ಅಕ್ಷವನ್ನು ಹೊಂದಿವೆ, ಅಂದರೆ. ಮಧ್ಯಂತರ ಅಂಕುಡೊಂಕಾದ ಮುಖ್ಯ ಅಂಕುಡೊಂಕಾದ (ಅದರ ಮೇಲೆ) ಅದೇ ಸ್ಲಾಟ್ಗಳಲ್ಲಿ ಸುತ್ತಿಕೊಳ್ಳಲಾಗುತ್ತದೆ.
ಈ ವಿಧಾನದ ಪ್ರಾಯೋಗಿಕ ಅನುಷ್ಠಾನವು ಈ ಕೆಳಗಿನಂತಿರುತ್ತದೆ. ಸ್ಟೇಟರ್ನ ಸ್ಲಾಟ್ಗಳಲ್ಲಿ, ಆಪರೇಟಿಂಗ್ (RO) ಮತ್ತು ಕೆಪಾಸಿಟರ್ ವಿಂಡ್ಗಳ (KO) ತಂತಿಗಳ ಜೊತೆಗೆ, ಹೆಚ್ಚುವರಿ ಅಂಕುಡೊಂಕಾದ (DO) ತಂತಿಗಳನ್ನು ಹಾಕಲಾಗುತ್ತದೆ. ವಿವಿಧ ಅಂಕುಡೊಂಕಾದ ಸ್ವಿಚಿಂಗ್ ಸರ್ಕ್ಯೂಟ್ಗಳ ಸಂಯೋಜನೆಯ ಪರಿಣಾಮವಾಗಿ (ಚಿತ್ರ 2), ನಿರಂತರ ಪೂರೈಕೆ ವೋಲ್ಟೇಜ್ನೊಂದಿಗೆ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ವಿವಿಧ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಪಡೆಯಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ.
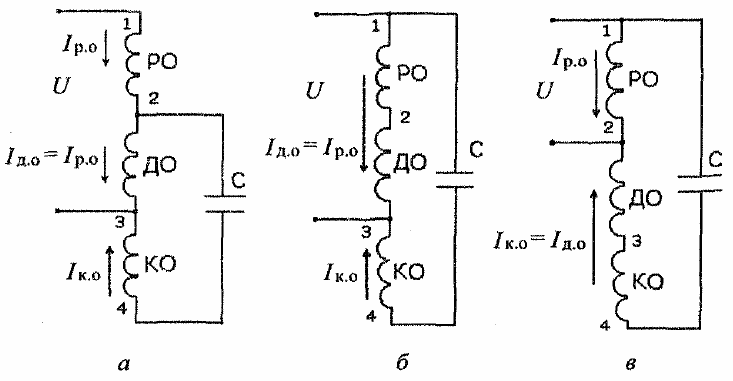
ಅಕ್ಕಿ. 2. ಕನಿಷ್ಠ (ಎ), ಹೆಚ್ಚಿದ (ಬಿ) ಮತ್ತು ಗರಿಷ್ಠ ವೇಗ (ಸಿ) ನಲ್ಲಿ ಬಹು-ವೇಗದ ಕೆಪಾಸಿಟರ್ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳ ಸಂಪರ್ಕ ರೇಖಾಚಿತ್ರಗಳು
ಬಹು-ವೇಗದ ಕೆಪಾಸಿಟರ್ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ಗಳಲ್ಲಿ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಸರಿಹೊಂದಿಸುವ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ, ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳ ಸ್ವಿಚಿಂಗ್ ಸರ್ಕ್ಯೂಟ್ಗಳಲ್ಲಿನ ಬದಲಾವಣೆಯೊಂದಿಗೆ ಅಸ್ಥಿರ ಪ್ರಕ್ರಿಯೆಗಳು ಸಂಭವಿಸುತ್ತವೆ.ಈ ಪ್ರಕ್ರಿಯೆಗಳು ನಿಯಮದಂತೆ, ನಿರಂತರ ಕಾಂತೀಯ ಕ್ಷೇತ್ರಗಳಲ್ಲಿ ಸಂಭವಿಸುತ್ತವೆ ಮತ್ತು ಮೋಟಾರ್ ವಿಂಡ್ಗಳು ಮತ್ತು ಹಂತ-ಶಿಫ್ಟಿಂಗ್ ಕೆಪಾಸಿಟರ್ನಲ್ಲಿ ಗಮನಾರ್ಹ ಒಳಹರಿವು ಪ್ರವಾಹಗಳು ಮತ್ತು ಓವರ್ವೋಲ್ಟೇಜ್ಗಳನ್ನು ಉಂಟುಮಾಡಬಹುದು.
2 ಸೆಟ್ ಸುರುಳಿಗಳೊಂದಿಗೆ ಎರಡು ವೇಗದ ಮೋಟಾರ್ಗಳು
2 ಸೆಟ್ ಸುರುಳಿಗಳನ್ನು ಇಡುವುದು ಅಂದರೆ. 2 ಮುಖ್ಯ ಸುರುಳಿಗಳು ಮತ್ತು 2 ಸಹಾಯಕ ಸುರುಳಿಗಳು, ಗಾತ್ರದಲ್ಲಿ ಗಮನಾರ್ಹ ಹೆಚ್ಚಳದ ಅಗತ್ಯವಿದೆ. ಈ ಆಯಾಮಗಳನ್ನು ಕಡಿಮೆ ಮಾಡಲು, ಸಹಾಯಕ ಅಥವಾ ಕಡಿಮೆ-ವೇಗದ ಅಂಕುಡೊಂಕಾದ ಸಂಪರ್ಕವನ್ನು ಹೆಚ್ಚಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ, ಅಲ್ಲಿ ಅಂಕುಡೊಂಕಾದ ಸಂಖ್ಯೆಯು ಧ್ರುವಗಳ ಸಂಖ್ಯೆಗಿಂತ ಕಡಿಮೆಯಿರುತ್ತದೆ.
ಅಂಜೂರದಲ್ಲಿ. 3 4 ಮತ್ತು 6 ಧ್ರುವಗಳಿಗೆ ವಿಂಡ್ಗಳ ಸಂಪರ್ಕ ರೇಖಾಚಿತ್ರವನ್ನು ತೋರಿಸುತ್ತದೆ (50 Hz ನಲ್ಲಿ ಸುಮಾರು 1435 ಮತ್ತು 950 rpm). ಹೊರ ಅಂಕುಡೊಂಕಾದ - 4-ಪೋಲ್ ಮುಖ್ಯ ಅಂಕುಡೊಂಕಾದ. ಮುಂದಿನದು 6 ಪೋಲ್ ಪ್ರಾಥಮಿಕ ವಿಂಡಿಂಗ್. ಮೂರನೆಯದು ಕೇವಲ 2 ಗುಂಪುಗಳ ಅಂಕುಡೊಂಕಾದ 4-ಪೋಲ್ ಸಹಾಯಕ ವಿಂಡ್ ಆಗಿದೆ. ಒಳಗಿನ ಸುರುಳಿಯು ಕೇವಲ 2 ಗುಂಪುಗಳ ಸುರುಳಿಗಳನ್ನು ಹೊಂದಿರುವ 6-ಪೋಲ್ ಸಹಾಯಕ ಸುರುಳಿಯಾಗಿದೆ.
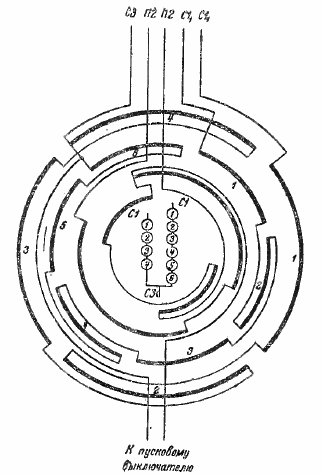
ಅಕ್ಕಿ. 3. 2-ವೇಗದ (4 ಮತ್ತು 6 ಪೋಲ್) ಮೋಟರ್ನ ವೈರಿಂಗ್ ರೇಖಾಚಿತ್ರ.
ಅಂಜೂರದಲ್ಲಿ. 3 ಮತ್ತು ಎರಡೂ ಸಹಾಯಕ ವಿಂಡ್ಗಳು ಕಡಿಮೆ ಸಂಖ್ಯೆಯ ಅಂಕುಡೊಂಕಾದ ಗುಂಪುಗಳನ್ನು ಹೊಂದಿವೆ. ನೀವು ಅದೇ ರೀತಿಯ ಮುಖ್ಯ ಸುರುಳಿಯನ್ನು ಸಹ ಮಾಡಬಹುದು.
2 ಉದಾಹರಣೆಗಳನ್ನು ನೋಡೋಣ. 4 ಮತ್ತು 8 ಧ್ರುವಗಳಿಗೆ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಸಾಮಾನ್ಯ 4-ಪೋಲ್ ಮುಖ್ಯ ಅಂಕುಡೊಂಕಾದ ಮತ್ತು ಕಡಿಮೆ ಸಂಖ್ಯೆಯ ಅಂಕುಡೊಂಕಾದ ಗುಂಪುಗಳೊಂದಿಗೆ 3 ಇತರ ವಿಂಡ್ಗಳನ್ನು ಹೊಂದಬಹುದು, ಅಂದರೆ. 4 ಅಂಕುಡೊಂಕಾದ ಗುಂಪುಗಳೊಂದಿಗೆ 8-ಪೋಲ್ ಮುಖ್ಯ ಅಂಕುಡೊಂಕಾದ, 2 ಅಂಕುಡೊಂಕಾದ ಗುಂಪುಗಳೊಂದಿಗೆ 4-ಪೋಲ್ ಸಹಾಯಕ ಅಂಕುಡೊಂಕಾದ ಮತ್ತು 8 - 4 ಅಂಕುಡೊಂಕಾದ ಗುಂಪುಗಳೊಂದಿಗೆ ಪೋಲ್ ಸಹಾಯಕ ಅಂಕುಡೊಂಕಾದ.
6 ಮತ್ತು 8 ಧ್ರುವಗಳಿಗೆ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಸಾಮಾನ್ಯ 6-ಪೋಲ್ ಮುಖ್ಯ ಅಂಕುಡೊಂಕಾದ ಹೊಂದಬಹುದು, ಎರಡು 8-ಪೋಲ್ ವಿಂಡ್ಗಳು ಕಡಿಮೆ ಸಂಖ್ಯೆಯ ಗುಂಪುಗಳೊಂದಿಗೆ, ಅಂದರೆ. 8-ಪೋಲ್ ಮುಖ್ಯ ಅಂಕುಡೊಂಕಾದ ಮತ್ತು 8-ಪೋಲ್ ಸಹಾಯಕ ಅಂಕುಡೊಂಕಾದ ಪ್ರತಿ 4-ಪೋಲ್ ಗುಂಪುಗಳು, ಮತ್ತು 2 ಅಂಕುಡೊಂಕಾದ ಗುಂಪುಗಳೊಂದಿಗೆ 6-ಪೋಲ್ ಸಹಾಯಕ ವಿಂಡಿಂಗ್. 6-ಪೋಲ್ ಸಹಾಯಕ ವಿಂಡಿಂಗ್ ಅನ್ನು ಸಹ ಸಾಮಾನ್ಯ ಅಂಕುಡೊಂಕಾದ ರೀತಿಯಲ್ಲಿ ವಿನ್ಯಾಸಗೊಳಿಸಬಹುದು, ಅಂದರೆ.ಸುರುಳಿಗಳ 6 ಗುಂಪುಗಳೊಂದಿಗೆ.
ಅಂಜೂರದಲ್ಲಿ. 4 2-ಹಂತದ ಸ್ಪ್ಲಿಟ್-ಫೇಸ್ ಮೋಟರ್ನ ರೇಖಾಚಿತ್ರವನ್ನು 2 ವಿಂಡ್ಗಳೊಂದಿಗೆ ತೋರಿಸುತ್ತದೆ ಮತ್ತು ಮುಖ್ಯಕ್ಕೆ ಸಂಪರ್ಕವನ್ನು ತೋರಿಸುತ್ತದೆ. ಕೇವಲ 1 ಪ್ರಾರಂಭ ಸ್ವಿಚ್ ಅಗತ್ಯವಿರುವ ರೀತಿಯಲ್ಲಿ ಸಂಪರ್ಕಗಳನ್ನು ಮಾಡಲಾಗುತ್ತದೆ. ಈ ಆರಂಭಿಕ ಸ್ವಿಚ್ ಕಡಿಮೆ ವೇಗದ ಸುರುಳಿಯ ಸಿಂಕ್ರೊನಸ್ ವೇಗದ 75 ರಿಂದ 80% ವರೆಗೆ ತೆರೆಯಬೇಕು.
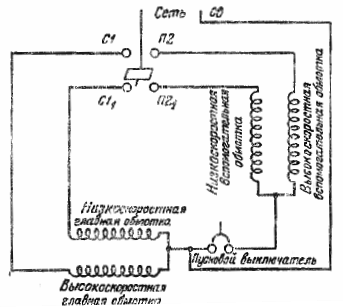
ಅಕ್ಕಿ. 4. ಎರಡು-ವೇಗದ ಸ್ಪ್ಲಿಟ್-ಫೇಸ್ ಮೋಟರ್ನ ರೇಖಾಚಿತ್ರ
ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಿರುವ ಯೋಜನೆ ವೇಳೆ. 4, ಕೆಪಾಸಿಟರ್ ಸ್ಟಾರ್ಟ್ ಮೋಟಾರ್ಗಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ, ನಂತರ 1 ಕೆಪಾಸಿಟರ್ ಅನ್ನು ಸ್ಟಾರ್ಟ್ ಸ್ವಿಚ್ನೊಂದಿಗೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ ಅಥವಾ 2 ಕೆಪಾಸಿಟರ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಅದರಲ್ಲಿ 1 ಅನ್ನು ಟರ್ಮಿನಲ್ P2 ಮತ್ತು ಇನ್ನೊಂದು ಟರ್ಮಿನಲ್ P21 ನೊಂದಿಗೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ.
ಮೋಟಾರ್ ಅನ್ನು ಯಾವಾಗಲೂ ಅದೇ ವೇಗಕ್ಕೆ ಹೊಂದಿಕೆಯಾಗುವ ಸಂಪರ್ಕದೊಂದಿಗೆ ಪ್ರಾರಂಭಿಸಬಹುದಾದರೆ, ನಂತರ ಸಹಾಯಕ ವಿಂಡ್ಗಳಲ್ಲಿ ಒಂದನ್ನು ಬಿಟ್ಟುಬಿಡಬಹುದು. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಪ್ರಾರಂಭವು ಭಾಗಶಃ ಅಥವಾ ಸಂಪೂರ್ಣವಾಗಿ ಸ್ವಯಂಚಾಲಿತವಾಗಿರುತ್ತದೆ.
ಬಹು-ವೇಗದ ಅಸಮಕಾಲಿಕ ಏಕ-ಹಂತದ ವಿದ್ಯುತ್ ಮೋಟರ್ DASM
ಗೃಹೋಪಯೋಗಿ ಉಪಕರಣಗಳಲ್ಲಿ ಹೆಚ್ಚಿನ ವೇಗವನ್ನು ಸಾಧಿಸಲು, ಹೆಚ್ಚಿನ ರೋಟರ್ ವೇಗದ ಅನುಪಾತದೊಂದಿಗೆ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳು ಹೆಚ್ಚಾಗಿ ಅಗತ್ಯವಿರುತ್ತದೆ. ಈ ಉದ್ದೇಶಗಳಿಗಾಗಿ 2/12 ಪೋಲ್ ಸಂಖ್ಯೆಗಳೊಂದಿಗೆ ಏಕ-ಹಂತದ ಕೆಪಾಸಿಟರ್ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ; 2/14; 2/16; 2/18; 2/24 ಮತ್ತು ಇನ್ನೂ ಹೆಚ್ಚಿನದು.
ಆದಾಗ್ಯೂ, ದೊಡ್ಡ ಧ್ರುವ ಅನುಪಾತದೊಂದಿಗೆ ಮೋಟಾರ್ಗಳ ಉತ್ಪಾದನೆಯು ತಾಂತ್ರಿಕವಾಗಿ ಕಷ್ಟಕರವಾಗಿದೆ, ಆದ್ದರಿಂದ ವಿವಿಧ ರೀತಿಯ ಯಾಂತ್ರಿಕ ವೇಗ ಪರಿವರ್ತಕಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಜೊತೆಗೆ ಪೂರೈಕೆ ವೋಲ್ಟೇಜ್ನ ಅರೆವಾಹಕ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು.
ಅತ್ಯಂತ ಸರಳವಾಗಿ, ಈ ಮೋಟಾರುಗಳಿಗೆ ಸಣ್ಣ ಮಿತಿಗಳಲ್ಲಿ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಸರಬರಾಜು ವೋಲ್ಟೇಜ್ ಅನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ; ಇದಕ್ಕಾಗಿ, ಹೆಚ್ಚುವರಿ ರೆಸಿಸ್ಟರ್ಗಳು ಅಥವಾ ಚೋಕ್ಗಳನ್ನು ಕಾಯಿಲ್ನೊಂದಿಗೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ.
USSR ನಲ್ಲಿ 16/2 ಧ್ರುವಗಳೊಂದಿಗೆ DASM-2 ಮತ್ತು DASM-4 ವಿಧಗಳ ಎರಡು-ವೇಗದ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳು ಮನೆಯ ಸ್ವಯಂಚಾಲಿತ ತೊಳೆಯುವ ಯಂತ್ರಗಳನ್ನು ಓಡಿಸಲು ಅಭಿವೃದ್ಧಿಪಡಿಸಲಾಗಿದೆ.
DASM -2 ಎಂಜಿನ್ ಅನ್ನು 4-5 ಕೆಜಿ ಡ್ರೈ ಲಿನಿನ್ ಸಾಮರ್ಥ್ಯದೊಂದಿಗೆ ಸ್ವಯಂಚಾಲಿತ ತೊಳೆಯುವ ಯಂತ್ರಗಳನ್ನು ಓಡಿಸಲು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ. ಇದನ್ನು ಮೂಲತಃ 390/2750 rpm ನಲ್ಲಿ 75/400 W ಶಕ್ತಿಗಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ.
ಅಕ್ಕಿ. 5. ಎರಡು-ವೇಗದ ಕೆಪಾಸಿಟರ್ ಅಸಮಕಾಲಿಕ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್, ಟೈಪ್ DASM-2
ಅಂಜೂರದಲ್ಲಿ. 5 DASM-2 ಮತ್ತು DASM-4 ಎಂಜಿನ್ಗಳನ್ನು ವಿದ್ಯುತ್ ಜಾಲಕ್ಕೆ ಸಂಪರ್ಕಿಸಲು ರೇಖಾಚಿತ್ರಗಳನ್ನು ತೋರಿಸುತ್ತದೆ. ಚಿತ್ರದಿಂದ ನೋಡಬಹುದಾದಂತೆ, DASM-2 ಮೋಟರ್ ನಾಲ್ಕು ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳನ್ನು ಹೊಂದಿದೆ. ಪ್ರಾಥಮಿಕ ಮತ್ತು ಸಹಾಯಕ ವಿಂಡ್ಗಳನ್ನು ಸಮಾನಾಂತರವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ.
ಕಡಿಮೆ ವೇಗದಲ್ಲಿ DASM-4 ಮೋಟರ್ ಅನ್ನು ಮೂರು-ಹಂತದ ನಕ್ಷತ್ರ ಸಂಪರ್ಕದೊಂದಿಗೆ ಮತ್ತು ಹೆಚ್ಚಿನ ವೇಗದಲ್ಲಿ - ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳ ಸಮಾನಾಂತರ ಸಂಪರ್ಕದೊಂದಿಗೆ ತಯಾರಿಸಲಾಗುತ್ತದೆ. ಓವರ್ಲೋಡ್ ಮತ್ತು ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ ಮೋಡ್ಗಳಲ್ಲಿ ವಿಂಡ್ಗಳನ್ನು ರಕ್ಷಿಸಲು ಮೋಟರ್ನ ಸ್ಟೇಟರ್ಗೆ ತಾಪಮಾನ ರಿಲೇ RK-1-00 ಅನ್ನು ಜೋಡಿಸಲಾಗಿದೆ. ಸಾಮಾನ್ಯವಾಗಿ ಮುಚ್ಚಿದ ರಿಲೇ ಸಂಪರ್ಕಗಳು ಮೋಟಾರ್ ಸ್ಟೇಟರ್ನ ಸಾಮಾನ್ಯ ಟರ್ಮಿನಲ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿವೆ.
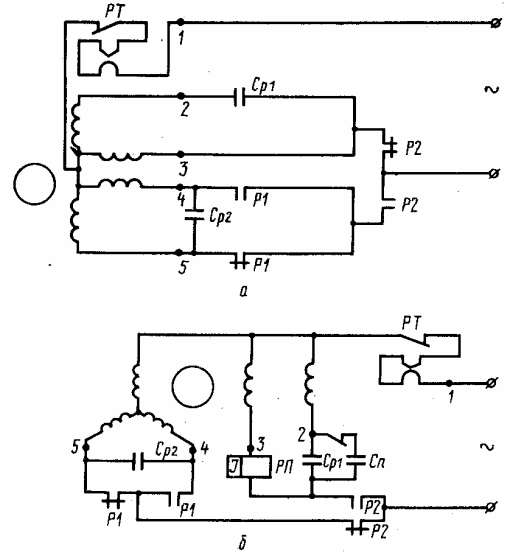
ಅಕ್ಕಿ. 5. ವಿದ್ಯುತ್ ಸರಬರಾಜು ನೆಟ್ವರ್ಕ್ಗೆ ಎರಡು-ವೇಗದ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳನ್ನು ಸಂಪರ್ಕಿಸುವ ಯೋಜನೆಗಳು: a- DASM-2 ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್; b - DASM-4 ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್. ನಾನು ಹೋಗುತ್ತಿದ್ದೇನೆ. - ಮುಖ್ಯ ಅಂಕುಡೊಂಕಾದ; V.O, - ಸಹಾಯಕ ಸುರುಳಿ; 1 - ಕಡಿಮೆ ಮತ್ತು ಹೆಚ್ಚಿನ ವೇಗದ ಸುರುಳಿಗಳ ಸಾಮಾನ್ಯ ಔಟ್ಪುಟ್; 2 - ಹೆಚ್ಚಿನ ವೇಗದ ಸಹಾಯಕ ಅಂಕುಡೊಂಕಾದ ಅಂತ್ಯ; 3 - ಹೆಚ್ಚಿನ ವೇಗದಲ್ಲಿ ಮುಖ್ಯ ಅಂಕುಡೊಂಕಾದ ಆರಂಭ; 4 - ಕಡಿಮೆ ವೇಗದ ಸಹಾಯಕ ಅಂಕುಡೊಂಕಾದ ಆರಂಭ; 5 - ಕಡಿಮೆ ವೇಗದಲ್ಲಿ ಮುಖ್ಯ ಅಂಕುಡೊಂಕಾದ ಆರಂಭ; ಸಿಪಿ - ಆಪರೇಟಿಂಗ್ ಕೆಪಾಸಿಟರ್; Cn - ಆರಂಭಿಕ ಕೆಪಾಸಿಟರ್; ಆರ್ಟಿ-ಥರ್ಮಲ್ ಪ್ರೊಟೆಕ್ಷನ್ ರಿಲೇ, ಟೈಪ್ ಆರ್ಕೆ -1-00; ಆರ್ಪಿ-ಆರಂಭಿಕ ರಿಲೇ, ಟೈಪ್ ಆರ್ಟಿಕೆ -1-11; P1, P2 - ನಿಯಂತ್ರಕದ ಸಂಪರ್ಕಗಳು.