ಎಂಜಿನ್ ವೇಗ ನಿಯಂತ್ರಣ ಸಾಧನಗಳು
ಅಸಮಕಾಲಿಕ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳನ್ನು ಕೌಂಟರ್ಕರೆಂಟ್ ಬ್ರೇಕ್ ಸರ್ಕ್ಯೂಟ್ಗಳಲ್ಲಿ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಇಂಡಕ್ಷನ್ ಸ್ಪೀಡ್ ಕಂಟ್ರೋಲ್ ರಿಲೇ... ರಿಲೇ 5 ರ ಇನ್ಪುಟ್ ಶಾಫ್ಟ್, ಅದರ ಮೇಲೆ ಸಿಲಿಂಡರಾಕಾರದ ಶಾಶ್ವತ ಮ್ಯಾಗ್ನೆಟ್ 4 ಅನ್ನು ಜೋಡಿಸಲಾಗಿದೆ, ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಶಾಫ್ಟ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ, ಅದರ ಕೋನೀಯ ವೇಗವನ್ನು ನಿಯಂತ್ರಿಸಬೇಕು.
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರು ತಿರುಗಿದಾಗ, ಆಯಸ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರವು ರೋಟರಿ ಸ್ಟೇಟರ್ನ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ 3 ರ ತಂತಿಗಳನ್ನು ದಾಟುತ್ತದೆ 6. ಒಂದು EMF ಅನ್ನು ವಿಂಡಿಂಗ್ನಲ್ಲಿ ಪ್ರೇರೇಪಿಸಲಾಗುತ್ತದೆ, ಅದರ ಮೌಲ್ಯವು ಶಾಫ್ಟ್ನ ತಿರುಗುವಿಕೆಯ ಕೋನೀಯ ವೇಗಕ್ಕೆ ಅನುಗುಣವಾಗಿರುತ್ತದೆ. ಅದರ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ, ಸುರುಳಿಯಲ್ಲಿ ಪ್ರಸ್ತುತವು ಕಾಣಿಸಿಕೊಳ್ಳುತ್ತದೆ ಮತ್ತು ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಬಲವು ಉದ್ಭವಿಸುತ್ತದೆ, ಇದು ಮ್ಯಾಗ್ನೆಟ್ನ ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕಿನಲ್ಲಿ ಸ್ಟೇಟರ್ 6 ಅನ್ನು ತಿರುಗಿಸಲು ಒಲವು ತೋರುತ್ತದೆ.
ಒಂದು ನಿರ್ದಿಷ್ಟ ತಿರುಗುವಿಕೆಯ ವೇಗದಲ್ಲಿ, ಬಲವು ತುಂಬಾ ಹೆಚ್ಚಾಗುತ್ತದೆ ಲಿಮಿಟರ್ 2, ಫ್ಲಾಟ್ ಸ್ಪ್ರಿಂಗ್ನ ಪ್ರತಿರೋಧವನ್ನು ಮೀರಿಸುತ್ತದೆ, ರಿಲೇ ಸಂಪರ್ಕಗಳನ್ನು ಬದಲಾಯಿಸುತ್ತದೆ. ರಿಲೇ ಎರಡು ಸಂಪರ್ಕ ನೋಡ್ಗಳನ್ನು ಹೊಂದಿದೆ: 1 ಮತ್ತು 7, ಇದು ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕನ್ನು ಅವಲಂಬಿಸಿ ಸ್ವಿಚ್ ಮಾಡಲಾಗುತ್ತದೆ.
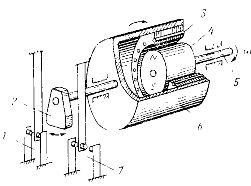
ಚಿತ್ರ 1. ಇಂಡಕ್ಟಿವ್ ವೇಗ ನಿಯಂತ್ರಣ ರಿಲೇ
ಇಂಡಕ್ಷನ್ ಸ್ಪೀಡ್ ಕಂಟ್ರೋಲ್ ರಿಲೇ ಸಂಕೀರ್ಣವಾದ ವಿನ್ಯಾಸ ಮತ್ತು ಕಡಿಮೆ ನಿಖರತೆಯನ್ನು ಹೊಂದಿದೆ, ಅದು ಒರಟಾದ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಗಳಿಗೆ ಮಾತ್ರ ಸ್ವೀಕಾರಾರ್ಹವಾಗಿರುತ್ತದೆ. ಟ್ಯಾಕೋಜೆನರೇಟರ್ ಅನ್ನು ಬಳಸಿಕೊಂಡು ಹೆಚ್ಚಿನ ವೇಗ ನಿಯಂತ್ರಣದ ನಿಖರತೆಯನ್ನು ಸಾಧಿಸಬಹುದು - ಅಳತೆ ಮಾಡುವ ಸೂಕ್ಷ್ಮ ಯಂತ್ರ, ಟರ್ಮಿನಲ್ಗಳಲ್ಲಿನ ವೋಲ್ಟೇಜ್ ತಿರುಗುವಿಕೆಯ ವೇಗಕ್ಕೆ ನೇರವಾಗಿ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ.
ಟ್ಯಾಕೋ ಜನರೇಟರ್ಗಳನ್ನು ವೇರಿಯಬಲ್ ಸ್ಪೀಡ್ ಡ್ರೈವ್ ಫೀಡ್ಬ್ಯಾಕ್ ಸಿಸ್ಟಮ್ಗಳಲ್ಲಿ ವ್ಯಾಪಕ rpm ಶ್ರೇಣಿಯೊಂದಿಗೆ ಬಳಸಲಾಗುತ್ತದೆ ಮತ್ತು ಆದ್ದರಿಂದ ಕೆಲವೇ ಶೇಕಡಾ ದೋಷವನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಅತ್ಯಂತ ಸಾಮಾನ್ಯವಾದವು DC ಟ್ಯಾಕೋಜೆನರೇಟರ್ಗಳಾಗಿವೆ.
ಅಂಜೂರದಲ್ಲಿ. 2 ಟ್ಯಾಕೋಜೆನೆರೇಟರ್ ಜಿ ಅನ್ನು ಬಳಸಿಕೊಂಡು ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ M ಗಾಗಿ ವೇಗ ನಿಯಂತ್ರಣ ರಿಲೇನ ರೇಖಾಚಿತ್ರವನ್ನು ತೋರಿಸುತ್ತದೆ, ಆರ್ಮೇಚರ್ ಸರ್ಕ್ಯೂಟ್ ವಿದ್ಯುತ್ಕಾಂತೀಯ ರಿಲೇ ಕೆ ಮತ್ತು ರೆಗ್ಯುಲೇಟಿಂಗ್ ರಿಯೋಸ್ಟಾಟ್ ಆರ್ ಅನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ. ಟ್ಯಾಕೋಜೆನರೇಟರ್ನ ಆರ್ಮೇಚರ್ ಟರ್ಮಿನಲ್ಗಳಲ್ಲಿನ ವೋಲ್ಟೇಜ್ ಆಪರೇಟಿಂಗ್ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಮೀರಿದಾಗ, ಬಾಹ್ಯ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ರಿಲೇ ಅನ್ನು ಆನ್ ಮಾಡಲಾಗಿದೆ.
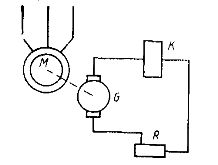
ಚಿತ್ರ 2. ಟ್ಯಾಕೋಜೆನರೇಟರ್ನೊಂದಿಗೆ ವೇಗ ನಿಯಂತ್ರಣ ರಿಲೇ
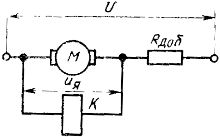
 ಚಿತ್ರ 3. ಟ್ಯಾಕೋಮೀಟರ್ ಸೇತುವೆಯ ಸ್ಕೀಮ್ಯಾಟಿಕ್
ಚಿತ್ರ 3. ಟ್ಯಾಕೋಮೀಟರ್ ಸೇತುವೆಯ ಸ್ಕೀಮ್ಯಾಟಿಕ್
ಆರ್ಮೇಚರ್ ಸರ್ಕ್ಯೂಟ್ನ ಪ್ರತಿರೋಧವು ಹೆಚ್ಚಾದಂತೆ, ಸರ್ಕ್ಯೂಟ್ನ ನಿಖರತೆ ಹೆಚ್ಚಾಗುತ್ತದೆ. ಆದ್ದರಿಂದ, ಕೆಲವೊಮ್ಮೆ ರಿಲೇ ಮಧ್ಯಂತರ ಸೆಮಿಕಂಡಕ್ಟರ್ ಆಂಪ್ಲಿಫಯರ್ ಮೂಲಕ ಟ್ಯಾಕೋಜೆನರೇಟರ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಈ ಉದ್ದೇಶಕ್ಕಾಗಿ ಸ್ಥಿರ ಪ್ರತಿಕ್ರಿಯೆ ವೋಲ್ಟೇಜ್ನೊಂದಿಗೆ ಅರೆವಾಹಕ ಸಂಪರ್ಕವಿಲ್ಲದ ಮಿತಿ ಅಂಶಗಳನ್ನು ಬಳಸಲು ಸಹ ಸಾಧ್ಯವಿದೆ.
DC ಟ್ಯಾಕೋಜೆನೆರೇಟರ್ ಅನ್ನು ಸಂಪರ್ಕವಿಲ್ಲದ ಅಸಮಕಾಲಿಕ ಟ್ಯಾಕೋಜೆನರೇಟರ್ನಿಂದ ಬದಲಾಯಿಸಿದರೆ ಸರ್ಕ್ಯೂಟ್ನ ವಿಶ್ವಾಸಾರ್ಹತೆಯನ್ನು ಸುಧಾರಿಸಬಹುದು.
ಅಸಮಕಾಲಿಕ ಟ್ಯಾಕೋಜೆನೆರೇಟರ್ ಗಾಜಿನ ರೂಪದಲ್ಲಿ ಮಾಡಿದ ಟೊಳ್ಳಾದ ಅಲ್ಲದ ಮ್ಯಾಗ್ನೆಟಿಕ್ ರೋಟರ್ ಅನ್ನು ಹೊಂದಿದೆ. ಸ್ಟೇಟರ್ ಪರಸ್ಪರ 90 ° ಕೋನದಲ್ಲಿ ಎರಡು ವಿಂಡ್ಗಳನ್ನು ಹೊಂದಿದೆ. ಸುರುಳಿಗಳಲ್ಲಿ ಒಂದನ್ನು ಪರ್ಯಾಯ ವಿದ್ಯುತ್ ಜಾಲಕ್ಕೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ.ಸೈನುಸೈಡಲ್ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಇತರ ವಿಂಡಿಂಗ್ನಿಂದ ತೆಗೆದುಹಾಕಲಾಗುತ್ತದೆ, ಇದು ರೋಟರ್ನ ವೇಗಕ್ಕೆ ಅನುಗುಣವಾಗಿರುತ್ತದೆ. ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ನ ಆವರ್ತನವು ಯಾವಾಗಲೂ ಮುಖ್ಯ ಆವರ್ತನಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
 ಆಧುನಿಕ DC ಎಕ್ಸಿಕ್ಯೂಟಿವ್ ಮೋಟಾರ್ಗಳಲ್ಲಿ, ಟ್ಯಾಕೋಜೆನೆರೇಟರ್ ಅನ್ನು ಯಂತ್ರದಂತೆಯೇ ಅದೇ ವಸತಿಗಳಲ್ಲಿ ನಿರ್ಮಿಸಲಾಗಿದೆ ಮತ್ತು ಮುಖ್ಯ ಮೋಟರ್ನಂತೆ ಅದೇ ಶಾಫ್ಟ್ನಲ್ಲಿ ಜೋಡಿಸಲಾಗಿದೆ. ಇದು ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ ಏರಿಳಿತವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ವೇಗ ನಿಯಂತ್ರಣದ ನಿಖರತೆಯನ್ನು ಸುಧಾರಿಸುತ್ತದೆ.
ಆಧುನಿಕ DC ಎಕ್ಸಿಕ್ಯೂಟಿವ್ ಮೋಟಾರ್ಗಳಲ್ಲಿ, ಟ್ಯಾಕೋಜೆನೆರೇಟರ್ ಅನ್ನು ಯಂತ್ರದಂತೆಯೇ ಅದೇ ವಸತಿಗಳಲ್ಲಿ ನಿರ್ಮಿಸಲಾಗಿದೆ ಮತ್ತು ಮುಖ್ಯ ಮೋಟರ್ನಂತೆ ಅದೇ ಶಾಫ್ಟ್ನಲ್ಲಿ ಜೋಡಿಸಲಾಗಿದೆ. ಇದು ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ ಏರಿಳಿತವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ವೇಗ ನಿಯಂತ್ರಣದ ನಿಖರತೆಯನ್ನು ಸುಧಾರಿಸುತ್ತದೆ.
PT-1 ವಿಧದ DC ಟ್ಯಾಕೋಜೆನರೇಟರ್ಗಳು ವಿದ್ಯುತ್ಕಾಂತೀಯ ಪ್ರಚೋದನೆಯೊಂದಿಗೆ PBST ಸರಣಿಯ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ಗಳಲ್ಲಿ ಸಾಮಾನ್ಯವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಹೆಚ್ಚಿನ ಟಾರ್ಕ್ ಡಿಸಿ ಮೋಟಾರ್ಸ್ ನಾನು ಶಾಶ್ವತ ಮ್ಯಾಗ್ನೆಟ್ ಎಕ್ಸೈಟೆಡ್ ಟ್ಯಾಚೊವನ್ನು ನಿರ್ಮಿಸಿದ್ದೇನೆ.
DC ಮೋಟಾರ್ M ಟ್ಯಾಕೋಜೆನರೇಟರ್ ಅನ್ನು ಹೊಂದಿರದ ಸಂದರ್ಭಗಳಲ್ಲಿ, ಆರ್ಮೇಚರ್ EMF ಅನ್ನು ಅಳೆಯುವ ಮೂಲಕ ಅದರ ವೇಗವನ್ನು ನಿಯಂತ್ರಿಸಬಹುದು. ಇದಕ್ಕಾಗಿ, ಟ್ಯಾಕೋಮೆಟ್ರಿಕ್ ಬ್ರಿಡ್ಜ್ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಇದು ಎರಡು ಪ್ರತಿರೋಧಕಗಳಿಂದ ರೂಪುಗೊಳ್ಳುತ್ತದೆ: R1 ಮತ್ತು R2, ಆರ್ಮೇಚರ್ ರಿ ಮತ್ತು ಯಂತ್ರ Rdp ನ ಹೆಚ್ಚುವರಿ ಧ್ರುವಗಳು. ಟ್ಯಾಕೋಮೀಟರ್ ಸೇತುವೆಯ ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ Uout = U1 - Udp, ಅಥವಾ
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಕಾಂತೀಯ ಹರಿವು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ ಎಂಬ ಷರತ್ತಿನ ಅಡಿಯಲ್ಲಿ ಕೊನೆಯ ಸಮಾನತೆಯು ಮಾನ್ಯವಾಗಿರುತ್ತದೆ. ಟ್ಯಾಕೋಮೆಟ್ರಿಕ್ ಸೇತುವೆಯ ಔಟ್ಪುಟ್ನಲ್ಲಿ ಥ್ರೆಶೋಲ್ಡ್ ಅಂಶವನ್ನು ಒಳಗೊಂಡಂತೆ, ಒಂದು ರಿಲೇ ಅನ್ನು ಪಡೆಯಲಾಗುತ್ತದೆ ಅದು ತಿರುಗುವಿಕೆಯ ನಿರ್ದಿಷ್ಟ ಕೋನೀಯ ವೇಗಕ್ಕೆ ಹೊಂದಿಸಲಾಗಿದೆ. ಬ್ರಷ್ ಸಂಪರ್ಕ ಪ್ರತಿರೋಧದ ವ್ಯತ್ಯಾಸ ಮತ್ತು ಪ್ರತಿರೋಧದ ತಾಪನ ಅಸಮತೋಲನದ ಕಾರಣದಿಂದಾಗಿ ಟ್ಯಾಕೋಮೀಟರ್ ಸೇತುವೆಯ ನಿಖರತೆ ಕಡಿಮೆಯಾಗಿದೆ.
DC ಮೋಟಾರ್ ಕೃತಕ ಗುಣಲಕ್ಷಣದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತಿದ್ದರೆ ಮತ್ತು ಆರ್ಮೇಚರ್ನಲ್ಲಿ ದೊಡ್ಡ ಹೆಚ್ಚುವರಿ ಪ್ರತಿರೋಧವನ್ನು ಸೇರಿಸಿದರೆ, ಆರ್ಮೇಚರ್ ಟರ್ಮಿನಲ್ಗಳಿಗೆ ಸಂಪರ್ಕಿಸಲಾದ ವೋಲ್ಟೇಜ್ ರಿಲೇ ಮೂಲಕ ವೇಗದ ರಿಲೇ ಕಾರ್ಯವನ್ನು ನಿರ್ವಹಿಸಬಹುದು.
ವಿದ್ಯುತ್ ಮೋಟಾರಿನ ಆರ್ಮೇಚರ್ನಲ್ಲಿ ವೋಲ್ಟೇಜ್ Uja = E + IjaRja.
I = (U — E) / (Ri + Rext), ನಾವು Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U ಅನ್ನು ಪಡೆಯುತ್ತೇವೆ, ನಂತರ ಎರಡನೇ ಪದವನ್ನು ನಿರ್ಲಕ್ಷಿಸಬಹುದು ಮತ್ತು ಆರ್ಮೇಚರ್ ಟರ್ಮಿನಲ್ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಇಎಮ್ಎಫ್ ಮತ್ತು ಮೋಟರ್ನ ತಿರುಗುವಿಕೆಯ ವೇಗಕ್ಕೆ ನೇರವಾಗಿ ಅನುಪಾತದಲ್ಲಿ ಪರಿಗಣಿಸಬಹುದು.
ಚಿತ್ರ 4. ವೋಲ್ಟೇಜ್ ರಿಲೇಗಳೊಂದಿಗೆ ವೇಗ ನಿಯಂತ್ರಣ
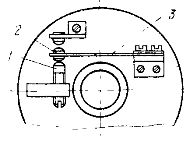 ಚಿತ್ರ 5. ಕೇಂದ್ರಾಪಗಾಮಿ ವೇಗ ನಿಯಂತ್ರಣ ರಿಲೇ
ಚಿತ್ರ 5. ಕೇಂದ್ರಾಪಗಾಮಿ ವೇಗ ನಿಯಂತ್ರಣ ರಿಲೇ
ಅವರು ತುಂಬಾ ಸರಳವಾದ ವಿನ್ಯಾಸವನ್ನು ಹೊಂದಿದ್ದಾರೆ. ಕೇಂದ್ರಾಪಗಾಮಿ ವೇಗ ಸ್ವಿಚ್ಗಳು ... ರಿಲೇಯ ಆಧಾರವು ಪ್ಲ್ಯಾಸ್ಟಿಕ್ ಫೇಸ್ ಪ್ಲೇಟ್ 4 ಆಗಿದೆ, ಶಾಫ್ಟ್ನಲ್ಲಿ ಜೋಡಿಸಲಾಗಿದೆ, ಅದರ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ನಿಯಂತ್ರಿಸಬೇಕು. ಬೃಹತ್ ಚಲಿಸಬಲ್ಲ ಸಂಪರ್ಕ 2 ಮತ್ತು ಸ್ಥಿರ ಹೊಂದಾಣಿಕೆಯ ಸಂಪರ್ಕ 1 ಅನ್ನು ಹೊಂದಿರುವ ಫ್ಲಾಟ್ ಸ್ಪ್ರಿಂಗ್ 3 ಅನ್ನು ಮುಂಭಾಗದ ಪ್ಲೇಟ್ನಲ್ಲಿ ನಿವಾರಿಸಲಾಗಿದೆ.ಸ್ಪ್ರಿಂಗ್ ವಿಶೇಷ ಉಕ್ಕಿನಿಂದ ಮಾಡಲ್ಪಟ್ಟಿದೆ, ಸ್ಥಿತಿಸ್ಥಾಪಕತ್ವದ ಮಾಡ್ಯುಲಸ್ ತಾಪಮಾನ ಬದಲಾವಣೆಗಳಿಂದ ಪ್ರಾಯೋಗಿಕವಾಗಿ ಸ್ವತಂತ್ರವಾಗಿರುತ್ತದೆ.
ಮುಖದ ಫಲಕವು ತಿರುಗಿದಾಗ, ಕೇಂದ್ರಾಪಗಾಮಿ ಬಲವು ಚಲಿಸಬಲ್ಲ ಸಂಪರ್ಕದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಇದು ಒಂದು ನಿರ್ದಿಷ್ಟ ವೇಗದಲ್ಲಿ ತಿರುಗುವಿಕೆಯ ಪ್ರತಿರೋಧವನ್ನು ನಿವಾರಿಸುತ್ತದೆ ಮತ್ತು ಸಂಪರ್ಕಗಳನ್ನು ಬದಲಾಯಿಸುತ್ತದೆ. ಸ್ಲಿಪ್ ರಿಂಗ್ಗಳು ಮತ್ತು ಬ್ರಷ್ಗಳ ಮೂಲಕ ಸಂಪರ್ಕ ಸಾಧನಕ್ಕೆ ಪ್ರಸ್ತುತವನ್ನು ಪೂರೈಸಲಾಗುತ್ತದೆ, ಚಿತ್ರದಲ್ಲಿ ತೋರಿಸಲಾಗಿಲ್ಲ. ಅಂತಹ ರಿಲೇಗಳನ್ನು DC ಮೈಕ್ರೋಮೋಟರ್ಗಳಿಗೆ ವೇಗದ ಸ್ಥಿರೀಕರಣ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ. ಅದರ ಸರಳತೆಯ ಹೊರತಾಗಿಯೂ, ಸಿಸ್ಟಮ್ 2% ರ ಕ್ರಮದಲ್ಲಿ ದೋಷದೊಂದಿಗೆ ವೇಗವನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ.
