ಓವರ್ಹೆಡ್ ಕ್ರೇನ್ಗಳೊಂದಿಗೆ ಎಲೆಕ್ಟ್ರಿಕ್ ಟ್ರಾಲಿ ಡ್ರೈವ್
ಓವರ್ಹೆಡ್ ಕ್ರೇನ್ ಹೊಂದಿರುವ ಟ್ರಾಲಿಯು ಎತ್ತುವ ಸಾಧನದ ಸ್ವತಂತ್ರ ಅಂಶವಾಗಿದೆ ಮತ್ತು ತಾಂತ್ರಿಕವಾಗಿ ನಿರ್ಧರಿಸಿದ ಚಲನೆಯ ವೇಗ ಮತ್ತು ಲೋಡ್ ಅನ್ನು ಇರಿಸುವ ಅಗತ್ಯ ನಿಖರತೆಯೊಂದಿಗೆ ಓವರ್ಹೆಡ್ ಕ್ರೇನ್ ವ್ಯಾಪ್ತಿಯಲ್ಲಿ ಲೋಡ್ಗಳನ್ನು ಸರಿಸಲು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ. ಬೋಗಿ ಡ್ರೈವ್ ಓವರ್ಹೆಡ್ ಕ್ರೇನ್ ಉಪಕರಣಗಳ ಮುಖ್ಯ ಅಂಶಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ.
ಟ್ರಾಲಿ ಓವರ್ಹೆಡ್ ಕ್ರೇನ್ ಟ್ರ್ಯಾಕ್ನಲ್ಲಿ ಚಲಿಸುತ್ತದೆ. ಸೇತುವೆಯು ಸ್ವತಃ ಕಾರ್ಟ್ನ ಚಲನೆಯ ದಿಕ್ಕಿಗೆ ಲಂಬವಾಗಿರುವ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸುತ್ತದೆ. ಕಾರ್ಟ್ನಲ್ಲಿ ಎತ್ತುವ ಕಾರ್ಯವಿಧಾನವನ್ನು ಸ್ಥಾಪಿಸಲಾಗಿದೆ, ಇದು ಕೊಕ್ಕೆ (ಅಥವಾ ವಿದ್ಯುತ್ಕಾಂತ) ಹೊಂದಿದ್ದು, ಅದರೊಂದಿಗೆ ನೀವು ಲೋಡ್ ಅನ್ನು ಚಲಿಸಬಹುದು. ಬೋಗಿಯ ಚಲನೆಯು ಓವರ್ಹೆಡ್ ಕ್ರೇನ್ (Fig. 1) ನ ತಾಂತ್ರಿಕ ಚಕ್ರದ ಅವಿಭಾಜ್ಯ ಅಂಗವಾಗಿದೆ.
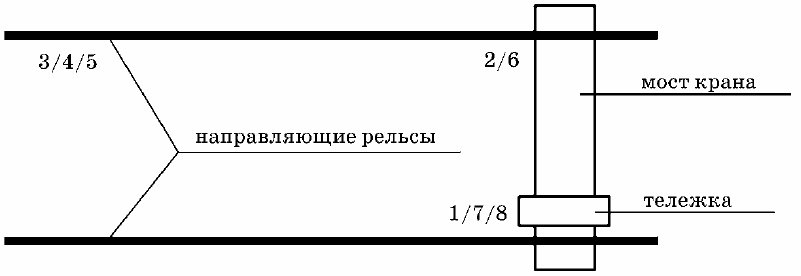
ಅಕ್ಕಿ. 1. ಕೆಲಸದ ಚಕ್ರದಲ್ಲಿ ಸೇತುವೆಯ ಕ್ರೇನ್ನೊಂದಿಗೆ ಕಾರ್ಯಾಚರಣೆಗಳನ್ನು ನಡೆಸುವ ಯೋಜನೆ
ಈ ಚಕ್ರವು ಈ ಕೆಳಗಿನ ಕಾರ್ಯಾಚರಣೆಗಳನ್ನು ಒಳಗೊಂಡಿದೆ (ಚಿತ್ರ 1 ರಲ್ಲಿ, ಕಾರ್ಯಾಚರಣೆ ಸಂಖ್ಯೆಗಳನ್ನು ಸಂಖ್ಯೆಯಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ):
1 - ಲೋಡ್ ಅನ್ನು ಎತ್ತುವುದು;
2 - ಕಾರ್ಟ್ ಅನ್ನು ನಿರ್ದಿಷ್ಟ ಸ್ಥಾನಕ್ಕೆ ಚಲಿಸುವುದು;
3 - ಕ್ರೇನ್ ಅನ್ನು ಪೂರ್ವನಿರ್ಧರಿತ ಸ್ಥಾನಕ್ಕೆ ಚಲಿಸುವುದು;
4 - ಹೊರೆಯ ತೂಕವನ್ನು ಕಡಿಮೆ ಮಾಡುವುದು;
5 - ಹೊರೆಯ ತೂಕದೊಂದಿಗೆ ಕೊಕ್ಕೆ ಎತ್ತುವುದು;
6 - ಕ್ರೇನ್ ಅನ್ನು ಅದರ ಮೂಲ ಸ್ಥಾನಕ್ಕೆ ಚಲಿಸುವುದು;
7 - ಕಾರ್ಟ್ ಅನ್ನು ಅದರ ಮೂಲ ಸ್ಥಾನಕ್ಕೆ ಚಲಿಸುವುದು;
8 - ಹುಕ್ ಅನ್ನು ಕಡಿಮೆ ಮಾಡುವುದು.
ಓವರ್ಹೆಡ್ ಕ್ರೇನ್ನ ಪ್ರಕ್ರಿಯೆಯ ಚಕ್ರದಿಂದ ನೋಡಬಹುದಾದಂತೆ, ಟ್ರಾಲಿ ಡ್ರೈವ್ ಮೋಟಾರ್ ಅನ್ನು ಎರಡನೇ ಮತ್ತು ಏಳನೇ ಕಾರ್ಯಾಚರಣೆಗಳಲ್ಲಿ ಆನ್ ಮಾಡಲಾಗಿದೆ. ಬೋಗಿಯು ಓವರ್ಹೆಡ್ ಕ್ರೇನ್ನ ದೂರದಲ್ಲಿ ನಿರ್ದಿಷ್ಟ ಸ್ಥಾನವನ್ನು ಸಮೀಪಿಸಿದಾಗ, ಅಗತ್ಯವಿರುವ ಬ್ರೇಕಿಂಗ್ ನಿಖರತೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಬೋಗಿ ಡ್ರೈವ್ನ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ ಅನ್ನು ವಿದ್ಯುತ್ ಬ್ರೇಕ್ ಮಾಡಲಾಗುತ್ತದೆ.
ನಂತರ ಎಂಜಿನ್ ಅನ್ನು ಸ್ವಿಚ್ ಆಫ್ ಮಾಡಲಾಗಿದೆ ಮತ್ತು ಯಾಂತ್ರಿಕ ಬ್ರೇಕ್ ಅನ್ನು ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ. ಇದರ ಜೊತೆಗೆ, ಸೇತುವೆಯ ಚಲನೆಯ ವಿದ್ಯುತ್ ಡ್ರೈವ್ ಅನ್ನು ಆನ್ ಮಾಡಲಾಗಿದೆ ಮತ್ತು ತಾಂತ್ರಿಕ ಕಾರ್ಯದ ಪ್ರಕಾರ ಕಾರ್ಯಾಗಾರದ ಉದ್ದಕ್ಕೂ ಲೋಡ್ ಚಲಿಸುತ್ತದೆ. ಗೊತ್ತುಪಡಿಸಿದ ಸ್ಥಳವನ್ನು ತಲುಪಿ, ಕ್ರೇನ್ ನಿಲ್ಲುತ್ತದೆ, ಲೋಡ್ ಅನ್ನು ಕಡಿಮೆಗೊಳಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ನಂತರ ಅಗತ್ಯ ತಾಂತ್ರಿಕ ಕಾರ್ಯಾಚರಣೆಗಳನ್ನು ಕೈಗೊಳ್ಳಲಾಗುತ್ತದೆ.

ಓವರ್ಹೆಡ್ ಕ್ರೇನ್ಗಳೊಂದಿಗೆ ಟ್ರಾಲಿ ಚಲನೆಯ ಕಾರ್ಯವಿಧಾನದ ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರವನ್ನು ಚಿತ್ರ 2 ರಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. ಡ್ರೈವ್ ಚಕ್ರಗಳ ನಡುವೆ ಮಧ್ಯದಲ್ಲಿ ಗೇರ್ಬಾಕ್ಸ್ನೊಂದಿಗೆ ಯೋಜನೆಯ ಪ್ರಕಾರ ಟ್ರಾಲಿ ಚಲನೆಯ ಕಾರ್ಯವಿಧಾನವನ್ನು ತಯಾರಿಸಲಾಗುತ್ತದೆ.
ಬ್ರೇಕ್ ಡಿಸ್ಕ್ ಟಿ, ಗೇರ್ ಬಾಕ್ಸ್ ಪಿ, ಕ್ಲಚ್ ಎಮ್ ಮತ್ತು ಶಾಫ್ಟ್ಸ್ ಬಿ ಮೂಲಕ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ ಡಿ ಯಿಂದ ಡ್ರೈವ್ ಚಾಲನೆಯಲ್ಲಿರುವ ಚಕ್ರಗಳಿಗೆ ರವಾನೆಯಾಗುತ್ತದೆ. ಕಾರ್ಟ್ ಅನ್ನು ಸ್ಥಿರವಾಗಿಡಲು ಬ್ರೇಕ್ ಪುಲ್ಲಿಯನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
ಕಾರ್ಟ್ ನಾಲ್ಕು ಪ್ರಯಾಣ ಚಕ್ರಗಳು ಮತ್ತು ಎರಡು ಡ್ರೈವ್ ಚಕ್ರಗಳನ್ನು ಹೊಂದಿದೆ. ಕ್ರೇನ್ ಟ್ರಾಲಿಗಳ ಪ್ರಯಾಣದ ಚಕ್ರಗಳನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಎರಡು ಪಕ್ಕೆಲುಬುಗಳಿಂದ ತಯಾರಿಸಲಾಗುತ್ತದೆ.
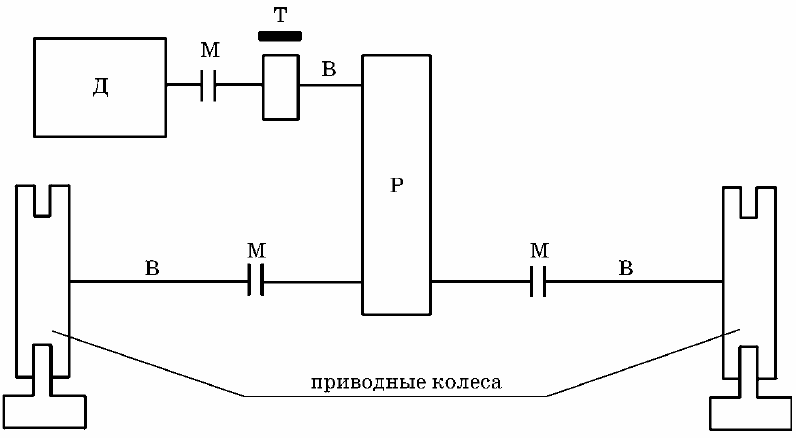
ಅಕ್ಕಿ. 2. ಟ್ರಾಲಿ ಚಲನೆಯ ಕಾರ್ಯವಿಧಾನದ ಚಲನಶಾಸ್ತ್ರದ ರೇಖಾಚಿತ್ರ
ಅಗತ್ಯವಿರುವ ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ಕಾರ್ಟ್ ಅನ್ನು ವೇಗಗೊಳಿಸಲು ಮತ್ತು ವೇಗಗೊಳಿಸಲು ಸಮಯವನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಂಡು ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ಸ್ಥಾನಕ್ಕೆ ಕಾರ್ಟ್ ಅನ್ನು ಚಲಿಸುವ ಸಮಯವನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ.ತಾಂತ್ರಿಕ ಪ್ರಕ್ರಿಯೆಯ ಪರಿಸ್ಥಿತಿಗಳ ಆಧಾರದ ಮೇಲೆ, ಕಾರ್ಟ್ ಅನ್ನು ಚಲಿಸುವಾಗ ಟ್ಯಾಕೋಗ್ರಾಮ್ ಚಿತ್ರ 3 ರಲ್ಲಿ ತೋರಿಸಿರುವ ರೂಪವನ್ನು ಹೊಂದಿರಬೇಕು.
ಅಗತ್ಯವಿರುವ ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ನಿರ್ದಿಷ್ಟ ವೇಗಕ್ಕೆ ಬೋಗಿ ಯಾಂತ್ರಿಕತೆಯ ಮೃದುವಾದ ಆರಂಭವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳುವುದು ಅವಶ್ಯಕ. ಅಗತ್ಯ ಸ್ಥಾನಿಕ ನಿಖರತೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು, ಕಡಿಮೆ ವೇಗಕ್ಕೆ ಪರಿವರ್ತನೆಯೊಂದಿಗೆ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವಿನ ಮೃದುವಾದ ಕುಸಿತದ ಅಗತ್ಯವಿರುತ್ತದೆ, ಅದರ ನಂತರ ಟ್ರಾಲಿ ನಿಲ್ಲುತ್ತದೆ.
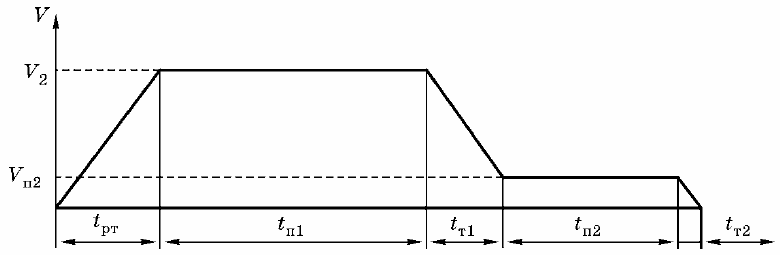
ಅಕ್ಕಿ. 3. ಟ್ರಾಲಿ ಚಲನೆಯ ಕಾರ್ಯವಿಧಾನದ ಟ್ಯಾಕೋಗ್ರಾಮ್
ರೈಲು ಕೀಲುಗಳಲ್ಲಿನ ಲೋಹದ ರಚನೆಯ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುವ ಬೋಗಿಯ ಚಲನೆ, ತೀವ್ರವಾದ ವೇಗವರ್ಧನೆ ಮತ್ತು ನಿಧಾನಗೊಳಿಸುವಿಕೆ, ಯಂತ್ರಗಳನ್ನು ಲೋಡ್ ಮಾಡಿದಾಗ ಲೋಹದ ರಚನೆಯ ನೈಸರ್ಗಿಕ ಕಂಪನಗಳು ಸೇತುವೆಯ ಕ್ರೇನ್ ಬೋಗಿಯಲ್ಲಿರುವ ವಿದ್ಯುತ್ ಉಪಕರಣಗಳ ಮೇಲೆ ಅತ್ಯಂತ ತೀವ್ರವಾದ ಯಾಂತ್ರಿಕ ಪರಿಣಾಮಗಳನ್ನು ಉಂಟುಮಾಡುತ್ತವೆ. ಇದರ ಆಧಾರದ ಮೇಲೆ, ಟ್ರಾಲಿಯನ್ನು ಚಲಿಸುವ ವಿದ್ಯುತ್ ಡ್ರೈವ್ ಈ ಕೆಳಗಿನ ಅವಶ್ಯಕತೆಗಳನ್ನು ಪೂರೈಸಬೇಕು:
1) ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಚಲನೆಯಲ್ಲಿ ಯಾಂತ್ರಿಕತೆಯನ್ನು ಪ್ರಾರಂಭಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಒದಗಿಸಬೇಕು, ಚಲನೆಯ ದಿಕ್ಕನ್ನು ಹಿಮ್ಮುಖಗೊಳಿಸಬೇಕು ಮತ್ತು ಅಗತ್ಯವಿರುವ ವೇಗವರ್ಧನೆ (m / s2) ಮತ್ತು ಸರಿಯಾದ ಸ್ಥಾನಿಕ ನಿಖರತೆ (ಮಿಮೀ) ನೊಂದಿಗೆ ಕಾರ್ಯವಿಧಾನವನ್ನು ನಿಲ್ಲಿಸಬೇಕು;
2) ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಮುಖ್ಯದಿಂದ ಸುಗಮ ವೇಗ ನಿಯಂತ್ರಣವನ್ನು ಒದಗಿಸಬೇಕು;
3) ಅಭಿವೃದ್ಧಿಪಡಿಸಿದ ಎಂಜಿನ್ ಟಾರ್ಕ್ ನಿರ್ದಿಷ್ಟ ತೀವ್ರತೆಯಲ್ಲಿ ಯಾಂತ್ರಿಕತೆಯ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಬೇಕು;
4) ಗಂಟೆಗೆ ನಿರ್ದಿಷ್ಟ ಸಂಖ್ಯೆಯ ಎಂಜಿನ್ ಪ್ರಾರಂಭದಲ್ಲಿ, ಅದರ ವಿಂಡ್ಗಳ ಮಿತಿಮೀರಿದ ಇರಬಾರದು, ಇದರಿಂದಾಗಿ ಯಾಂತ್ರಿಕತೆಯ ದೀರ್ಘಕಾಲದ ನಿಲುಗಡೆ ಸಾಧ್ಯ;
5) ಆಪರೇಟಿಂಗ್ ಷರತ್ತುಗಳಿಗೆ ಅನುಗುಣವಾಗಿ ಮೋಟರ್ ಅನ್ನು ಆಯ್ಕೆ ಮಾಡಬೇಕು, ಅಂದರೆ, ಅದು ಸೂಕ್ತವಾದ ವಿನ್ಯಾಸವನ್ನು ಹೊಂದಿರಬೇಕು ಮತ್ತು ಅದರ ವಿಂಡ್ಗಳು ಶಾಖ-ನಿರೋಧಕವಾಗಿರಬೇಕು ಮತ್ತು ತೇವಾಂಶದ ವಿರುದ್ಧ ನಿರೋಧನವನ್ನು ಹೊಂದಿರಬೇಕು;
6) ಡ್ರೈವ್ ಮೋಟಾರು ಚಿಕ್ಕ ಫ್ಲೈವೀಲ್ ದ್ರವ್ಯರಾಶಿಗಳನ್ನು ಹೊಂದಿರಬೇಕು, ಇದು ಆಗಾಗ್ಗೆ ಚಾಲನೆಯ ಪ್ರಾರಂಭದ ಸಮಯದಲ್ಲಿ ಅಸ್ಥಿರತೆಯ ಹರಿವಿನ ಮೇಲೆ ಗಮನಾರ್ಹ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ;
7) ಡ್ರೈವ್ ಮೋಟರ್ ಚಾಲನೆಯಲ್ಲಿರುವ ಕಾರ್ಯವಿಧಾನದ ಶಕ್ತಿಯನ್ನು ಹೊಂದಿಕೆಯಾಗಬೇಕು ಮತ್ತು ಅಗತ್ಯ ಓವರ್ಲೋಡ್ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿರಬೇಕು;
8) ವಿದ್ಯುತ್ ಡ್ರೈವ್ ಕನಿಷ್ಠ ಅವಧಿಯೊಂದಿಗೆ ಅಸ್ಥಿರ ಪ್ರಕ್ರಿಯೆಗಳ ರಚನೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಬೇಕು;
9) ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವಿನ ವಿನ್ಯಾಸದಲ್ಲಿ ಸುರಕ್ಷತೆ ಮತ್ತು ನಿರ್ವಹಣೆಯ ಸುಲಭತೆಯನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳಬೇಕು.

ಉತ್ಪಾದನಾ ಸೌಲಭ್ಯದಲ್ಲಿ ಸಮತಲ ಟ್ರ್ಯಾಕ್ ಲೈನ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಚಲನೆಯ ಕಾರ್ಯವಿಧಾನಗಳ ಸ್ಥಿರ ಕ್ಷಣವನ್ನು ಬೇರಿಂಗ್ಗಳಲ್ಲಿ ಘರ್ಷಣೆಯ ಬಲಗಳನ್ನು ಜಾರುವ ಮೂಲಕ ಮತ್ತು ಓವರ್ಹೆಡ್ ಕ್ರೇನ್ನ ಹಳಿಗಳ ಮೇಲೆ ಉರುಳುವ ಬೋಗಿ ಚಕ್ರಗಳ ರೋಲಿಂಗ್ ಘರ್ಷಣೆಯಿಂದ ರಚಿಸಲಾಗಿದೆ. ಟ್ರಾಲಿಯ ಮುಂದಕ್ಕೆ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ಯಾಂತ್ರಿಕತೆಯ ಸ್ಥಿರ ಕ್ಷಣವನ್ನು ಕ್ರೇನ್ನ ಎತ್ತುವ ಸಾಮರ್ಥ್ಯದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಬೋಗಿಯ ಹಿಮ್ಮುಖ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ಯಾಂತ್ರಿಕತೆಯ ಸ್ಥಿರ ಕ್ಷಣವನ್ನು ಅಪೂರ್ಣ ಹೊರೆಗೆ ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ.
ಓವರ್ಹೆಡ್ ಕ್ರೇನ್ಗಳ ಟ್ರಾಲಿಯ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ಗಾಗಿ, ಅಸಮಕಾಲಿಕ ಅಳಿಲು-ಕೇಜ್ ರೋಟರ್ ಮೋಟಾರ್ಗಳು (ಸೇರಿದಂತೆ ವೇರಿಯಬಲ್ ಫ್ರೀಕ್ವೆನ್ಸಿ ಡ್ರೈವ್ನ ಭಾಗವಾಗಿ), ಗಾಯದ ರೋಟರ್ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ಗಳು ಮತ್ತು ಸ್ವತಂತ್ರವಾಗಿ ಉತ್ಸುಕವಾಗಿರುವ ಡಿಸಿ ಮೋಟಾರ್ಗಳು.