ಏಕ-ಹಂತ ಮತ್ತು ಎರಡು-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು
ಏಕ-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳ ಕಾರ್ಯಾಚರಣೆಯ ಉದ್ದೇಶ, ಸಾಧನ ಮತ್ತು ತತ್ವ
ಏಕ-ಹಂತದ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ಗಳು ಕಡಿಮೆ-ಶಕ್ತಿಯ ಯಂತ್ರಗಳಾಗಿವೆ, ಇದು ವಿನ್ಯಾಸದಲ್ಲಿ ಮೂರು-ಹಂತದ ಅಳಿಲು-ಕೇಜ್ ಮೋಟರ್ಗಳನ್ನು ಹೋಲುತ್ತದೆ.
ಏಕ-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳು ಸ್ಟೇಟರ್ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಮೂರು-ಹಂತದ ಮೋಟರ್ಗಳಿಂದ ಭಿನ್ನವಾಗಿರುತ್ತವೆ, ಅಲ್ಲಿ ಎರಡು-ಹಂತದ ಅಂಕುಡೊಂಕಾದ ಮ್ಯಾಗ್ನೆಟಿಕ್ ಸರ್ಕ್ಯೂಟ್ನ ಚಡಿಗಳಲ್ಲಿ ಇದೆ, ಇದು 120 ಎಲ್ ಹಂತದ ಪ್ರದೇಶದೊಂದಿಗೆ ಮುಖ್ಯ ಅಥವಾ ಕೆಲಸದ ಹಂತವನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ. ಆಲಿಕಲ್ಲು ಮತ್ತು C1 ಮತ್ತು C2 ಎಂದು ಗುರುತಿಸಲಾದ ಟರ್ಮಿನಲ್ಗಳಿಗೆ ಕಾರಣವಾಗುತ್ತದೆ, ಮತ್ತು 60 el ನ ಹಂತದ ಪ್ರದೇಶದೊಂದಿಗೆ ಸಹಾಯಕ ಅಥವಾ ಆರಂಭಿಕ ಹಂತ. ಆಲಿಕಲ್ಲು ಮತ್ತು B1 ಮತ್ತು B2 ಎಂದು ಗುರುತಿಸಲಾದ ಟರ್ಮಿನಲ್ಗಳಿಗೆ ಕಾರಣವಾಗುತ್ತದೆ (ಚಿತ್ರ 1).
ಈ ಅಂಕುಡೊಂಕಾದ ಹಂತಗಳ ಕಾಂತೀಯ ಅಕ್ಷಗಳು 0 = 90 el ಕೋನದಿಂದ ಪರಸ್ಪರ ಸಂಬಂಧಿಸಿರುತ್ತವೆ. ಆಲಿಕಲ್ಲು ಮಳೆ. ಪರ್ಯಾಯ ವೋಲ್ಟೇಜ್ ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಕೆಲಸದ ಹಂತವು ರೋಟರ್ ತಿರುಗಲು ಕಾರಣವಾಗುವುದಿಲ್ಲ, ಏಕೆಂದರೆ ಅದರ ಪ್ರವಾಹವು ಸ್ಥಿರವಾದ ಸಮ್ಮಿತಿಯ ಅಕ್ಷದೊಂದಿಗೆ ಪರ್ಯಾಯ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ಪ್ರಚೋದಿಸುತ್ತದೆ, ಇದು ಸಮಯಕ್ಕೆ ಸಾಮರಸ್ಯದಿಂದ ಬದಲಾಗುವ ಕಾಂತೀಯ ಇಂಡಕ್ಷನ್ನಿಂದ ನಿರೂಪಿಸಲ್ಪಟ್ಟಿದೆ.
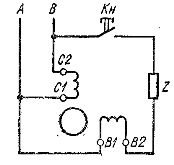
ಅಕ್ಕಿ. 1. ಏಕ-ಹಂತದ ಅಳಿಲು-ಕೇಜ್ ರೋಟರ್ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಸರ್ಕ್ಯೂಟ್ ರೇಖಾಚಿತ್ರ.
ಈ ಕ್ಷೇತ್ರವನ್ನು ಎರಡು ಘಟಕಗಳಿಂದ ಪ್ರತಿನಿಧಿಸಬಹುದು - ನೇರ ಮತ್ತು ಹಿಮ್ಮುಖ ಅನುಕ್ರಮದ ಒಂದೇ ವೃತ್ತಾಕಾರದ ಕಾಂತೀಯ ಕ್ಷೇತ್ರಗಳು, ಕಾಂತೀಯ ಇಂಡಕ್ಷನ್ಗಳೊಂದಿಗೆ ತಿರುಗುವುದು, ಅದೇ ವೇಗದಲ್ಲಿ ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗುವುದು. ಆದಾಗ್ಯೂ, ರೋಟರ್ ಅಗತ್ಯವಿರುವ ದಿಕ್ಕಿನಲ್ಲಿ ಪೂರ್ವ-ವೇಗವನ್ನು ಹೆಚ್ಚಿಸಿದಾಗ, ಕೆಲಸದ ಹಂತವನ್ನು ಆನ್ ಮಾಡಿದಾಗ ಅದು ಅದೇ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗುವುದನ್ನು ಮುಂದುವರಿಸುತ್ತದೆ.
 ಈ ಕಾರಣಕ್ಕಾಗಿ, ಏಕ-ಹಂತದ ಮೋಟಾರಿನ ಪ್ರಾರಂಭವು ಪ್ರಾರಂಭದ ಗುಂಡಿಯನ್ನು ಒತ್ತುವ ಮೂಲಕ ರೋಟರ್ ಅನ್ನು ವೇಗಗೊಳಿಸುವ ಮೂಲಕ ಪ್ರಾರಂಭವಾಗುತ್ತದೆ, ಇದರಿಂದಾಗಿ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಎರಡೂ ಹಂತಗಳಲ್ಲಿ ಪ್ರವಾಹಗಳು ಉತ್ಸುಕವಾಗುತ್ತವೆ, ಇವುಗಳ ನಿಯತಾಂಕಗಳನ್ನು ಅವಲಂಬಿಸಿ ಮೊತ್ತದಿಂದ ಹಂತ-ಬದಲಾಯಿಸಲ್ಪಡುತ್ತವೆ. ಹಂತ-ಶಿಫ್ಟಿಂಗ್ ಸಾಧನ Z, ರೆಸಿಸ್ಟರ್, ಇಂಡಕ್ಟರ್ ಅಥವಾ ಕೆಪಾಸಿಟರ್ ರೂಪದಲ್ಲಿ ಮಾಡಲ್ಪಟ್ಟಿದೆ ಮತ್ತು ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಕಾರ್ಯ ಮತ್ತು ಆರಂಭಿಕ ಹಂತಗಳನ್ನು ಒಳಗೊಂಡಿರುವ ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ ಅಂಶಗಳು. ಈ ಪ್ರವಾಹಗಳು ಗಾಳಿಯ ಅಂತರದಲ್ಲಿ ಕಾಂತೀಯ ಪ್ರಚೋದನೆಯೊಂದಿಗೆ ಯಂತ್ರದಲ್ಲಿ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ಉಂಟುಮಾಡುತ್ತವೆ, ಇದು ನಿಯತಕಾಲಿಕವಾಗಿ ಮತ್ತು ಏಕತಾನತೆಯಿಂದ ಗರಿಷ್ಠ ಮತ್ತು ಕನಿಷ್ಠ ಮೌಲ್ಯಗಳಲ್ಲಿ ಬದಲಾಗುತ್ತದೆ ಮತ್ತು ಅದರ ವೆಕ್ಟರ್ನ ಅಂತ್ಯವು ದೀರ್ಘವೃತ್ತವನ್ನು ವಿವರಿಸುತ್ತದೆ.
ಈ ಕಾರಣಕ್ಕಾಗಿ, ಏಕ-ಹಂತದ ಮೋಟಾರಿನ ಪ್ರಾರಂಭವು ಪ್ರಾರಂಭದ ಗುಂಡಿಯನ್ನು ಒತ್ತುವ ಮೂಲಕ ರೋಟರ್ ಅನ್ನು ವೇಗಗೊಳಿಸುವ ಮೂಲಕ ಪ್ರಾರಂಭವಾಗುತ್ತದೆ, ಇದರಿಂದಾಗಿ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಎರಡೂ ಹಂತಗಳಲ್ಲಿ ಪ್ರವಾಹಗಳು ಉತ್ಸುಕವಾಗುತ್ತವೆ, ಇವುಗಳ ನಿಯತಾಂಕಗಳನ್ನು ಅವಲಂಬಿಸಿ ಮೊತ್ತದಿಂದ ಹಂತ-ಬದಲಾಯಿಸಲ್ಪಡುತ್ತವೆ. ಹಂತ-ಶಿಫ್ಟಿಂಗ್ ಸಾಧನ Z, ರೆಸಿಸ್ಟರ್, ಇಂಡಕ್ಟರ್ ಅಥವಾ ಕೆಪಾಸಿಟರ್ ರೂಪದಲ್ಲಿ ಮಾಡಲ್ಪಟ್ಟಿದೆ ಮತ್ತು ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಕಾರ್ಯ ಮತ್ತು ಆರಂಭಿಕ ಹಂತಗಳನ್ನು ಒಳಗೊಂಡಿರುವ ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ ಅಂಶಗಳು. ಈ ಪ್ರವಾಹಗಳು ಗಾಳಿಯ ಅಂತರದಲ್ಲಿ ಕಾಂತೀಯ ಪ್ರಚೋದನೆಯೊಂದಿಗೆ ಯಂತ್ರದಲ್ಲಿ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ಉಂಟುಮಾಡುತ್ತವೆ, ಇದು ನಿಯತಕಾಲಿಕವಾಗಿ ಮತ್ತು ಏಕತಾನತೆಯಿಂದ ಗರಿಷ್ಠ ಮತ್ತು ಕನಿಷ್ಠ ಮೌಲ್ಯಗಳಲ್ಲಿ ಬದಲಾಗುತ್ತದೆ ಮತ್ತು ಅದರ ವೆಕ್ಟರ್ನ ಅಂತ್ಯವು ದೀರ್ಘವೃತ್ತವನ್ನು ವಿವರಿಸುತ್ತದೆ.
ಇದು. ಅಂಡಾಕಾರದ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವು ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟೆಡ್ ರೋಟರ್ ವಿಂಡಿಂಗ್ನ ತಂತಿಗಳಲ್ಲಿ ಇಎಮ್ಎಫ್ ಮತ್ತು ಪ್ರವಾಹಗಳನ್ನು ಪತ್ತೆ ಮಾಡುತ್ತದೆ, ಇದು ಈ ಕ್ಷೇತ್ರದೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸುತ್ತದೆ, ಕ್ಷೇತ್ರದ ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕಿನಲ್ಲಿ ಏಕ-ಹಂತದ ಮೋಟರ್ನ ರೋಟರ್ನ ವೇಗವರ್ಧನೆಯನ್ನು ಖಚಿತಪಡಿಸುತ್ತದೆ ಮತ್ತು ಅದು ಕೆಲವು ಸೆಕೆಂಡುಗಳಲ್ಲಿ ಬಹುತೇಕ ನಾಮಮಾತ್ರದ ವೇಗವನ್ನು ತಲುಪುತ್ತದೆ.
ಪ್ರಾರಂಭದ ಗುಂಡಿಯನ್ನು ಬಿಡುಗಡೆ ಮಾಡುವುದರಿಂದ ವಿದ್ಯುತ್ ಮೋಟರ್ ಅನ್ನು ಎರಡು-ಹಂತದ ಮೋಡ್ನಿಂದ ಏಕ-ಹಂತದ ಮೋಡ್ಗೆ ವರ್ಗಾಯಿಸುತ್ತದೆ, ಇದು ಪರ್ಯಾಯ ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ಅನುಗುಣವಾದ ಘಟಕದಿಂದ ಹೆಚ್ಚುವರಿಯಾಗಿ ಬೆಂಬಲಿತವಾಗಿದೆ, ಅದರ ತಿರುಗುವಿಕೆಯ ಸಮಯದಲ್ಲಿ ಸ್ಲಿಪ್ನಿಂದ ತಿರುಗುವ ರೋಟರ್ಗಿಂತ ಸ್ವಲ್ಪ ಮುಂದಿದೆ.
ಪವರ್ ನೆಟ್ವರ್ಕ್ನಿಂದ ಏಕ-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಆರಂಭಿಕ ಹಂತದ ಸಮಯೋಚಿತ ಸಂಪರ್ಕ ಕಡಿತವು ಅದರ ವಿನ್ಯಾಸದ ಕಾರಣದಿಂದಾಗಿ ಅಗತ್ಯವಾಗಿರುತ್ತದೆ, ಇದು ಅಲ್ಪಾವಧಿಯ ಕಾರ್ಯಾಚರಣೆಯ ವಿಧಾನವನ್ನು ಒದಗಿಸುತ್ತದೆ - ಸಾಮಾನ್ಯವಾಗಿ 3 ಸೆ ವರೆಗೆ, ಇದು ಅದರ ದೀರ್ಘಕಾಲೀನ ವಾಸ್ತವ್ಯವನ್ನು ಹೊರತುಪಡಿಸುತ್ತದೆ ಸ್ವೀಕಾರಾರ್ಹವಲ್ಲದ ಮಿತಿಮೀರಿದ, ನಿರೋಧನ ಸುಡುವಿಕೆ ಮತ್ತು ಹಾನಿಯಿಂದಾಗಿ ಲೋಡ್ ಅಡಿಯಲ್ಲಿ.
ಏಕ-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳ ಕಾರ್ಯಾಚರಣೆಯ ವಿಶ್ವಾಸಾರ್ಹತೆಯನ್ನು ಹೆಚ್ಚಿಸುವ ಮೂಲಕ, ವಿಟಿ ಮತ್ತು ಬಿ 2 ಎಂದು ಗುರುತಿಸಲಾದ ಟರ್ಮಿನಲ್ಗಳಿಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದ ಅಡ್ಡಿಪಡಿಸುವ ಸಂಪರ್ಕಗಳೊಂದಿಗೆ ಕೇಂದ್ರಾಪಗಾಮಿ ಸ್ವಿಚ್ ಅನ್ನು ಎಂಬೆಡ್ ಮಾಡುವ ಮೂಲಕ ಒದಗಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಪಿಟಿ ಮತ್ತು ಸಿ 1 ಎಂದು ಗುರುತಿಸಲಾದ ಟರ್ಮಿನಲ್ಗಳನ್ನು ಹೊಂದಿರುವ ಥರ್ಮಲ್ ರಿಲೇ (ಚಿತ್ರ 2, ಸಿ, ಡಿ).
ಕೇಂದ್ರಾಪಗಾಮಿ ಸ್ವಿಚ್ ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಬಿ 1 ಮತ್ತು ಬಿ 2 ಎಂದು ಗುರುತಿಸಲಾದ ಟರ್ಮಿನಲ್ಗಳಿಗೆ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಆರಂಭಿಕ ಹಂತವನ್ನು ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸುತ್ತದೆ, ರೋಟರ್ ರೇಟ್ ಮಾಡಲಾದ ವೇಗವನ್ನು ತಲುಪಿದಾಗ, ಮತ್ತು ಥರ್ಮಲ್ ರಿಲೇ ಬಿಸಿಯಾದಾಗ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಎರಡೂ ಹಂತಗಳನ್ನು ಮುಖ್ಯದಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸುತ್ತದೆ. ಅನುಮತಿಸುವುದಕ್ಕಿಂತ ಹೆಚ್ಚಿನದು.
ಸ್ಟಾರ್ಟ್ ಬಟನ್ ಅನ್ನು ಸ್ವಿಚ್ ಮಾಡುವ ಮೂಲಕ ಮತ್ತು ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ನ ಟರ್ಮಿನಲ್ಗಳಲ್ಲಿ ಲೋಹದ ತಟ್ಟೆಯನ್ನು ಮರುಹೊಂದಿಸುವ ಮೂಲಕ ಪ್ರಾರಂಭಿಸುವಾಗ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಒಂದು ಹಂತದಲ್ಲಿ ಪ್ರವಾಹದ ದಿಕ್ಕನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ರೋಟರ್ನ ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕಿನ ಹಿಮ್ಮುಖವನ್ನು ಸಾಧಿಸಲಾಗುತ್ತದೆ (ಚಿತ್ರ 1). 2, a, b) ಅಥವಾ ಎರಡು ರೀತಿಯ ಪ್ಲೇಟ್ಗಳನ್ನು ಮರುಹೊಂದಿಸುವ ಮೂಲಕ ಮಾತ್ರ (Fig. 2, c, d).
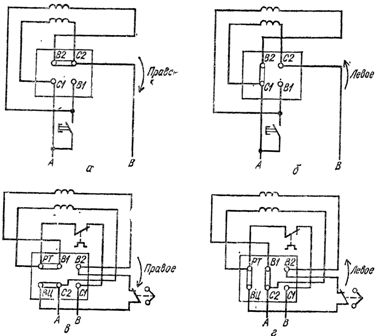
ಅಕ್ಕಿ. 2. ಅಳಿಲು ರೋಟರ್ನೊಂದಿಗೆ ಏಕ-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಹಂತಗಳ ಟರ್ಮಿನಲ್ಗಳ ಗುರುತು ಮತ್ತು ರೋಟರ್ ತಿರುಗುವಿಕೆಗೆ ಅವುಗಳ ಸಂಪರ್ಕ: a, c - ಬಲ, b, d - ಎಡ.
ಏಕ-ಹಂತ ಮತ್ತು ಮೂರು-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳ ತಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳ ಹೋಲಿಕೆ
ಏಕ-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳು ಕಡಿಮೆ ಆರಂಭಿಕ ಟಾರ್ಕ್ ಫ್ಯಾಕ್ಟರ್ kn = МХ / Mnom ಮತ್ತು ಹೆಚ್ಚಿದ ಆರಂಭಿಕ ಕರೆಂಟ್ ಫ್ಯಾಕ್ಟರ್ ki = Mi / Mnom ಜೊತೆಗೆ ರೇಟ್ ಮಾಡಲಾದ ಶಕ್ತಿಯಲ್ಲಿ ಹೋಲುವ ಮೂರು-ಹಂತದ ಯಂತ್ರಗಳಿಂದ ಭಿನ್ನವಾಗಿರುತ್ತವೆ, ಇದು ಆರಂಭಿಕ ಹಂತದ ಏಕ-ಹಂತದ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳಿಗೆ ಹೆಚ್ಚಿದ ನೇರ ಪ್ರವಾಹ ಪ್ರತಿರೋಧದೊಂದಿಗೆ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಮತ್ತು ಕೆಲಸದ ಹಂತದ ಕಡಿಮೆ ಇಂಡಕ್ಟನ್ಸ್ ಪ್ರಮುಖ kn - 1.0 - 1.5 ಮತ್ತು ki = 5 - 9.
ಏಕ-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳ ಆರಂಭಿಕ ಗುಣಲಕ್ಷಣಗಳು ಮೂರು-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳಿಗಿಂತ ಕೆಟ್ಟದಾಗಿದೆ, ಏಕೆಂದರೆ ಅಂಡಾಕಾರದ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವು ಏಕ-ಹಂತದ ಯಂತ್ರಗಳ ಪ್ರಾರಂಭದಲ್ಲಿ ಉತ್ಸುಕವಾಗಿದೆ ಎಂಬ ಅಂಶದಿಂದಾಗಿ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಆರಂಭಿಕ ಹಂತವು ಎರಡಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಏಕರೂಪವಲ್ಲದ ವೃತ್ತಾಕಾರದ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರಗಳು - ನೇರವಾಗಿ ಮತ್ತು ಪ್ರತಿಯಾಗಿ, ಬ್ರೇಕಿಂಗ್ ಪರಿಣಾಮವನ್ನು ಉಂಟುಮಾಡುತ್ತದೆ.
 ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಕೆಲಸದ ಮತ್ತು ಆರಂಭಿಕ ಹಂತದ ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ಗಳ ಅಂಶಗಳ ನಿಯತಾಂಕಗಳನ್ನು ಆಯ್ಕೆ ಮಾಡುವ ಮೂಲಕ, ಪ್ರಾರಂಭದಲ್ಲಿ ವೃತ್ತಾಕಾರದ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ಪ್ರಚೋದನೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಸಾಧ್ಯವಿದೆ, ಇದು ಹಂತ-ಬದಲಾಯಿಸುವ ಅಂಶದೊಂದಿಗೆ ಸಾಧ್ಯ. ಸೂಕ್ತವಾದ ಸಾಮರ್ಥ್ಯದೊಂದಿಗೆ ಕೆಪಾಸಿಟರ್ ರೂಪದಲ್ಲಿ.
ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಕೆಲಸದ ಮತ್ತು ಆರಂಭಿಕ ಹಂತದ ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ಗಳ ಅಂಶಗಳ ನಿಯತಾಂಕಗಳನ್ನು ಆಯ್ಕೆ ಮಾಡುವ ಮೂಲಕ, ಪ್ರಾರಂಭದಲ್ಲಿ ವೃತ್ತಾಕಾರದ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ಪ್ರಚೋದನೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಸಾಧ್ಯವಿದೆ, ಇದು ಹಂತ-ಬದಲಾಯಿಸುವ ಅಂಶದೊಂದಿಗೆ ಸಾಧ್ಯ. ಸೂಕ್ತವಾದ ಸಾಮರ್ಥ್ಯದೊಂದಿಗೆ ಕೆಪಾಸಿಟರ್ ರೂಪದಲ್ಲಿ.
ರೋಟರ್ನ ವೇಗವರ್ಧನೆಯು ಯಂತ್ರದ ಸರ್ಕ್ಯೂಟ್ಗಳ ನಿಯತಾಂಕಗಳಲ್ಲಿ ಬದಲಾವಣೆಯನ್ನು ಉಂಟುಮಾಡುತ್ತದೆ, ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವು ವೃತ್ತಾಕಾರದಿಂದ ಅಂಡಾಕಾರದವರೆಗೆ ಬದಲಾಗುತ್ತದೆ, ಹೀಗಾಗಿ ಮೋಟರ್ನ ಆರಂಭಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಕ್ಷೀಣಿಸುತ್ತದೆ. ಆದ್ದರಿಂದ, ಸುಮಾರು 0.8 ನಾಮಮಾತ್ರದ ವೇಗದಲ್ಲಿ, ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಆರಂಭಿಕ ಹಂತವು ಹಸ್ತಚಾಲಿತವಾಗಿ ಅಥವಾ ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಸ್ವಿಚ್ ಆಫ್ ಆಗುತ್ತದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಮೋಟಾರ್ ಏಕ-ಹಂತದ ಕಾರ್ಯಾಚರಣೆಗೆ ಬದಲಾಗುತ್ತದೆ.
ಆರಂಭಿಕ ಕೆಪಾಸಿಟರ್ನೊಂದಿಗೆ ಏಕ-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು ಆರಂಭಿಕ ಆರಂಭಿಕ ಟಾರ್ಕ್ kp = 1.7 - 2.4 ಮತ್ತು ಆರಂಭಿಕ ಆರಂಭಿಕ ಕರೆಂಟ್ನ ಬಹುಸಂಖ್ಯೆಯ ಕಿ = 3 - 5 ಅನ್ನು ಹೊಂದಿರುತ್ತವೆ.
ಎರಡು ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು
ಎರಡು-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರುಗಳಲ್ಲಿ, 90 el ನ ಹಂತದ ಪ್ರದೇಶಗಳೊಂದಿಗೆ ಸ್ಟೇಟರ್ ವಿಂಡ್ ಮಾಡುವ ಎರಡು ಹಂತಗಳು. ಕೆಲಸಗಾರರಿಗೆ ಶುಭಾಶಯಗಳು. ಅವು ಸ್ಟೇಟರ್ನ ಮ್ಯಾಗ್ನೆಟಿಕ್ ಸರ್ಕ್ಯೂಟ್ನ ಚಡಿಗಳಲ್ಲಿ ನೆಲೆಗೊಂಡಿವೆ, ಆದ್ದರಿಂದ ಅವುಗಳ ಕಾಂತೀಯ ಅಕ್ಷಗಳು 90 ಎಲ್ ಕೋನವನ್ನು ರೂಪಿಸುತ್ತವೆ. ಆಲಿಕಲ್ಲು ಮಳೆ. ಸ್ಟೇಟರ್ ಅಂಕುಡೊಂಕಾದ ಈ ಹಂತಗಳು ತಿರುವುಗಳ ಸಂಖ್ಯೆಯಲ್ಲಿ ಮಾತ್ರವಲ್ಲದೆ ರೇಟ್ ಮಾಡಲಾದ ವೋಲ್ಟೇಜ್ಗಳು ಮತ್ತು ಪ್ರವಾಹಗಳಲ್ಲಿಯೂ ಪರಸ್ಪರ ಭಿನ್ನವಾಗಿರುತ್ತವೆ, ಆದಾಗ್ಯೂ ಅವುಗಳ ಒಟ್ಟು ಶಕ್ತಿಗಳು ಮೋಟರ್ನ ರೇಟ್ ಮೋಡ್ನಲ್ಲಿ ಒಂದೇ ಆಗಿರುತ್ತವೆ.
ಸ್ಟೇಟರ್ ಅಂಕುಡೊಂಕಾದ ಹಂತಗಳಲ್ಲಿ ಒಂದಾದ ಶಾಶ್ವತ ಕೆಪಾಸಿಟರ್ Cp (Fig. 3, a) ಇದೆ, ಇದು ಮೋಟರ್ನ ನಾಮಮಾತ್ರದ ಮೋಡ್ನ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ವೃತ್ತಾಕಾರದ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ಪ್ರಚೋದನೆಯನ್ನು ಒದಗಿಸುತ್ತದೆ. ಈ ಕೆಪಾಸಿಟರ್ನ ಸಾಮರ್ಥ್ಯವನ್ನು ಸೂತ್ರದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ:
° Cp = I1sinφ1 / 2πfUn2
ಅಲ್ಲಿ I1 ಮತ್ತು φ1- ಕ್ರಮವಾಗಿ ವೃತ್ತಾಕಾರದ ತಿರುಗುವ ಕಾಂತಕ್ಷೇತ್ರದಲ್ಲಿ ಕೆಪಾಸಿಟರ್ ಇಲ್ಲದೆ ಸ್ಟೇಟರ್ ಅಂಕುಡೊಂಕಾದ ಹಂತದ ಸರ್ಕ್ಯೂಟ್ನ ವೋಲ್ಟೇಜ್ ಮತ್ತು ಪ್ರವಾಹದ ನಡುವಿನ ಪ್ರಸ್ತುತ ಮತ್ತು ಹಂತದ ಬದಲಾವಣೆ, I ಮತ್ತು ti - ಪರ್ಯಾಯ ಪ್ರವಾಹದ ಆವರ್ತನ ಮತ್ತು ಪೂರೈಕೆಯ ವೋಲ್ಟೇಜ್ ನೆಟ್ವರ್ಕ್, ಕ್ರಮವಾಗಿ, n- ರೂಪಾಂತರ ಗುಣಾಂಕ - ಸೂತ್ರದಿಂದ ನಿರ್ಧರಿಸಲ್ಪಟ್ಟ ಕೆಪಾಸಿಟರ್ನೊಂದಿಗೆ ಮತ್ತು ಇಲ್ಲದೆ ಕ್ರಮವಾಗಿ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಹಂತಗಳ ತಿರುವುಗಳ ಪರಿಣಾಮಕಾರಿ ಸಂಖ್ಯೆಯ ಅನುಪಾತ
n = kvol2 w2 / ktom 1 w1
ಅಲ್ಲಿ коб2 ಮತ್ತು коб1 - w2 ಮತ್ತು w1 ತಿರುವುಗಳ ಸಂಖ್ಯೆಯೊಂದಿಗೆ ಸ್ಟೇಟರ್ ಅಂಕುಡೊಂಕಾದ ಅನುಗುಣವಾದ ಹಂತಗಳ ಅಂಕುಡೊಂಕಾದ ಗುಣಾಂಕಗಳು.
ಕೆಪಾಸಿಟರ್ ಟರ್ಮಿನಲ್ ವೋಲ್ಟೇಜ್ ಯುಸಿ ಎರಡು-ಹಂತದ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಅಂಕುಡೊಂಕಾದ ಹಂತದೊಂದಿಗೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕಗೊಂಡಿದ್ದು, ಮುಖ್ಯ ವೋಲ್ಟೇಜ್ U ಗಿಂತ ವೃತ್ತಾಕಾರದ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರದೊಂದಿಗೆ ಮತ್ತು ಈ ಕೆಳಗಿನಂತೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ:
Uc = U √1 + n2
ನಾಮಮಾತ್ರವನ್ನು ಹೊರತುಪಡಿಸಿ ಮೋಟಾರ್ ಲೋಡ್ಗೆ ಪರಿವರ್ತನೆಯು ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರದಲ್ಲಿ ಬದಲಾವಣೆಯೊಂದಿಗೆ ಇರುತ್ತದೆ, ಇದು ವೃತ್ತಾಕಾರದ ಬದಲಿಗೆ ದೀರ್ಘವೃತ್ತವಾಗುತ್ತದೆ.ಇದು ಎಂಜಿನ್ನ ಕೆಲಸದ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹದಗೆಡಿಸುತ್ತದೆ, ಮತ್ತು ಪ್ರಾರಂಭಿಸಿದಾಗ, ಇದು ಆರಂಭಿಕವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ ಟಾರ್ಕ್ ಪ್ರಾರಂಭವಾಗುತ್ತಿದೆ MP ಗೆ <0.3Mnom, ಸೌಮ್ಯವಾದ ಆರಂಭಿಕ ಪರಿಸ್ಥಿತಿಗಳೊಂದಿಗೆ ಅನುಸ್ಥಾಪನೆಗಳಲ್ಲಿ ಮಾತ್ರ ಶಾಶ್ವತವಾಗಿ ಸಂಪರ್ಕಗೊಂಡ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳ ಬಳಕೆಯನ್ನು ಸೀಮಿತಗೊಳಿಸುತ್ತದೆ.
ಆರಂಭಿಕ ಟಾರ್ಕ್ ಅನ್ನು ಹೆಚ್ಚಿಸಲು, ಆರಂಭಿಕ ಕೆಪಾಸಿಟರ್ Cn ಅನ್ನು ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಕೆಪಾಸಿಟರ್ Cp (Fig.3, b) ನೊಂದಿಗೆ ಸಮಾನಾಂತರವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಅದರ ಸಾಮರ್ಥ್ಯವು ಕೆಲಸ ಮಾಡುವ ಕೆಪಾಸಿಟರ್ನ ಸಾಮರ್ಥ್ಯಕ್ಕಿಂತ ಹೆಚ್ಚು ಮತ್ತು ಆರಂಭಿಕ ಪ್ರಾರಂಭದ ಸೆಟ್ ಅನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ. ಟಾರ್ಕ್, ಇದನ್ನು ಎರಡು ಅಥವಾ ಹೆಚ್ಚಿನದಕ್ಕೆ ಹೆಚ್ಚಿಸಬಹುದು.
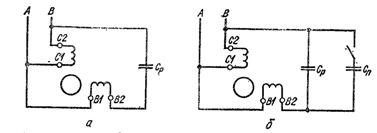
ಅಕ್ಕಿ. 3. ಅಳಿಲು-ಕೇಜ್ ರೋಟರ್ನೊಂದಿಗೆ ಎರಡು-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳಲ್ಲಿ ಸ್ವಿಚ್ ಮಾಡುವ ಯೋಜನೆಗಳು: a - ಶಾಶ್ವತವಾಗಿ ಸಂಪರ್ಕಿತ ಕೆಪಾಸಿಟರ್ನೊಂದಿಗೆ, b - ಚಾಲನೆಯಲ್ಲಿರುವ ಮತ್ತು ಆರಂಭಿಕ ಕೆಪಾಸಿಟರ್ನೊಂದಿಗೆ.
ರೋಟರ್ ನಾಮಮಾತ್ರದ ಆರಂಭಿಕ ಕೆಪಾಸಿಟರ್ನ 0.6 - 0.7 ವೇಗಕ್ಕೆ ವೇಗವನ್ನು ಹೆಚ್ಚಿಸಿದ ನಂತರ, ವೃತ್ತಾಕಾರದ ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ದೀರ್ಘವೃತ್ತಕ್ಕೆ ಪರಿವರ್ತಿಸುವುದನ್ನು ತಪ್ಪಿಸಲು ಅದನ್ನು ಆಫ್ ಮಾಡಲಾಗಿದೆ, ಇದು ಮೋಟರ್ನ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಹದಗೆಡಿಸುತ್ತದೆ.
ಅಂತಹ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳ ಆರಂಭಿಕ ಮೋಡ್ ಅನ್ನು ಈ ಕೆಳಗಿನ ನಿಯತಾಂಕಗಳಿಂದ ನಿರೂಪಿಸಲಾಗಿದೆ: kn = 1.7 - 2.4 ಮತ್ತು ki = 4 - 6.
ಸ್ಟೇಟರ್ ಅಂಕುಡೊಂಕಾದ ಮೇಲೆ ಆರಂಭಿಕ ಮುಸುಕನ್ನು ಹೊಂದಿರುವ ಏಕ-ಹಂತದ ಮೋಟಾರ್ಗಳಿಗಿಂತ ಉತ್ತಮ ಶಕ್ತಿಯ ಗುಣಲಕ್ಷಣಗಳಿಂದ ಕೆಪಾಸಿಟರ್ ಮೋಟಾರ್ಗಳನ್ನು ಪ್ರತ್ಯೇಕಿಸಲಾಗಿದೆ ಮತ್ತು ಕೆಪಾಸಿಟರ್ಗಳ ಬಳಕೆಗೆ ಧನ್ಯವಾದಗಳು, ಅದೇ ಶಕ್ತಿಯ ಮೂರು-ಹಂತದ ಮೋಟಾರ್ಗಳಿಗಿಂತ ಹೆಚ್ಚಿನ ಶಕ್ತಿಯ ಅಂಶವಾಗಿದೆ.
ಯುನಿವರ್ಸಲ್ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು
ಸ್ವಯಂಚಾಲಿತ ನಿಯಂತ್ರಣ ಅನುಸ್ಥಾಪನೆಗಳು ಸಾರ್ವತ್ರಿಕ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳನ್ನು ಬಳಸುತ್ತವೆ - ಕಡಿಮೆ ಶಕ್ತಿಯ ಮೂರು-ಹಂತದ ಯಂತ್ರಗಳು, ಇದು ಮೂರು-ಹಂತ ಅಥವಾ ಏಕ-ಹಂತದ ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಏಕ-ಹಂತದ ನೆಟ್ವರ್ಕ್ನಿಂದ ಚಾಲಿತವಾದಾಗ, ಮೋಟಾರ್ಗಳ ಆರಂಭಿಕ ಮತ್ತು ಕಾರ್ಯಾಚರಣೆಯ ಗುಣಲಕ್ಷಣಗಳು ಮೂರು-ಹಂತದ ಮೋಡ್ನಲ್ಲಿ ಬಳಸಿದಾಗ ಸ್ವಲ್ಪ ಕೆಟ್ಟದಾಗಿದೆ.
ಯುಎಡಿ ಸರಣಿಯ ಯುನಿವರ್ಸಲ್ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳನ್ನು ಎರಡು ಮತ್ತು ನಾಲ್ಕು-ಧ್ರುವಗಳೊಂದಿಗೆ ಉತ್ಪಾದಿಸಲಾಗುತ್ತದೆ, ಇದು ಮೂರು-ಹಂತದ ಮೋಡ್ನಲ್ಲಿ 1.5 ರಿಂದ 70 W ವರೆಗೆ ನಾಮಮಾತ್ರದ ಶಕ್ತಿಯನ್ನು ಹೊಂದಿರುತ್ತದೆ ಮತ್ತು ಏಕ-ಹಂತದ ಮೋಡ್ನಲ್ಲಿ - 1 ರಿಂದ 55 W ವರೆಗೆ ಮತ್ತು ಪರ್ಯಾಯದಿಂದ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ದಕ್ಷತೆಯೊಂದಿಗೆ 50 Hz ಆವರ್ತನದೊಂದಿಗೆ ವೋಲ್ಟೇಜ್ ನೆಟ್ವರ್ಕ್ η= 0.09 - 0.65.
ಮಬ್ಬಾದ ಅಥವಾ ಮಬ್ಬಾದ ಧ್ರುವಗಳೊಂದಿಗೆ ಏಕ-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು
ಒಡೆದ ಅಥವಾ ಮಬ್ಬಾದ ಧ್ರುವಗಳೊಂದಿಗೆ ಏಕ-ಹಂತದ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ಗಳಲ್ಲಿ, ಪ್ರತಿ ಧ್ರುವವನ್ನು ಆಳವಾದ ತೋಡುಗಳಿಂದ ಎರಡು ಅಸಮಾನ ಭಾಗಗಳಾಗಿ ವಿಂಗಡಿಸಲಾಗಿದೆ ಮತ್ತು ಧ್ರುವದ ಸಂಪೂರ್ಣ ಮ್ಯಾಗ್ನೆಟಿಕ್ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಒಳಗೊಂಡ ಏಕ-ಹಂತದ ಅಂಕುಡೊಂಕಾದ ಮತ್ತು ಅದರ ಸಣ್ಣ ಭಾಗದಲ್ಲಿ ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ತಿರುವುಗಳನ್ನು ಹೊಂದಿರುತ್ತದೆ.
ಈ ಮೋಟಾರ್ಗಳ ರೋಟರ್ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ ವಿಂಡಿಂಗ್ ಹೊಂದಿದೆ. ಒಂದು ಸೈನುಸೈಡಲ್ ವೋಲ್ಟೇಜ್ಗೆ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಸೇರ್ಪಡೆಯು ಅದರಲ್ಲಿ ಪ್ರವಾಹವನ್ನು ಸ್ಥಾಪಿಸುವುದರೊಂದಿಗೆ ಮತ್ತು ಸಮ್ಮಿತಿಯ ಸ್ಥಿರ ಅಕ್ಷದೊಂದಿಗೆ ಪರ್ಯಾಯ ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ಪ್ರಚೋದನೆಯೊಂದಿಗೆ ಇರುತ್ತದೆ, ಇದು ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಲೂಪ್ಗಳಲ್ಲಿ ಅನುಗುಣವಾದ ಇಎಮ್ಎಫ್ ಮತ್ತು ಪ್ರವಾಹಗಳನ್ನು ಪ್ರೇರೇಪಿಸುತ್ತದೆ.
ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಪ್ರವಾಹಗಳ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ, ಅನುಗುಣವಾದ m.d.s ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ಪ್ರಚೋದಿಸುತ್ತದೆ, ಇದು ರಕ್ಷಿತ ಆಗಾಗ್ಗೆ ಧ್ರುವಗಳಲ್ಲಿ ಮುಖ್ಯ ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ಬಲವರ್ಧನೆ ಮತ್ತು ದುರ್ಬಲಗೊಳ್ಳುವುದನ್ನು ತಡೆಯುತ್ತದೆ. ಧ್ರುವಗಳ ರಕ್ಷಿತ ಮತ್ತು ರಕ್ಷಿತ ಭಾಗಗಳ ಕಾಂತೀಯ ಕ್ಷೇತ್ರಗಳು ಸಮಯದಿಂದ ಹೊರಗಿವೆ ಮತ್ತು ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ಸ್ಥಳಾಂತರಗೊಂಡು, ಧ್ರುವದ ರಕ್ಷಿತ ಭಾಗದ ಕಾಂತೀಯ ಅಕ್ಷದಿಂದ ಕಾಂತೀಯ ಅಕ್ಷಕ್ಕೆ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲಿಸುವ ಅಂಡಾಕಾರದ ತಿರುಗುವ ಕಾಂತಕ್ಷೇತ್ರವನ್ನು ರೂಪಿಸುತ್ತದೆ. ಅದರ ರಕ್ಷಾಕವಚದ ಭಾಗ.
ರೋಟರ್ ವಿಂಡಿಂಗ್ನಲ್ಲಿ ಉಂಟಾಗುವ ಪ್ರವಾಹಗಳೊಂದಿಗೆ ಈ ಕ್ಷೇತ್ರದ ಪರಸ್ಪರ ಕ್ರಿಯೆಯು ಆರಂಭಿಕ ಟಾರ್ಕ್ Mn = (0.2 - 0.6) Mn ನ ನೋಟವನ್ನು ಉಂಟುಮಾಡುತ್ತದೆ ಮತ್ತು ಮೋಟಾರ್ ಶಾಫ್ಟ್ಗೆ ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್ ಅನ್ನು ಅನ್ವಯಿಸದಿದ್ದರೆ ರೇಟ್ ಮಾಡಲಾದ ವೇಗಕ್ಕೆ ರೋಟರ್ನ ವೇಗವರ್ಧನೆ ಉಂಟಾಗುತ್ತದೆ. ಆರಂಭಿಕ ಟಾರ್ಕ್ ಅನ್ನು ಮೀರಲು.
ಸ್ಪ್ಲಿಟ್ ಅಥವಾ ಮಬ್ಬಾದ ಧ್ರುವಗಳೊಂದಿಗೆ ಏಕ-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳ ಆರಂಭಿಕ ಪ್ರಾರಂಭ ಮತ್ತು ಗರಿಷ್ಠ ಟಾರ್ಕ್ಗಳನ್ನು ಹೆಚ್ಚಿಸಲು, ಉಕ್ಕಿನ ಹಾಳೆಯ ಮ್ಯಾಗ್ನೆಟಿಕ್ ಷಂಟ್ಗಳನ್ನು ಅವುಗಳ ಧ್ರುವಗಳ ನಡುವೆ ಇರಿಸಲಾಗುತ್ತದೆ, ಇದು ತಿರುಗುವ ಕಾಂತಕ್ಷೇತ್ರವನ್ನು ವೃತ್ತಾಕಾರಕ್ಕೆ ಹತ್ತಿರ ತರುತ್ತದೆ.
ಮಬ್ಬಾದ ಪೋಲ್ ಮೋಟಾರ್ಗಳು ರಿವರ್ಸಿಬಲ್ ಅಲ್ಲದ ಸಾಧನಗಳಾಗಿವೆ, ಅದು ಆಗಾಗ್ಗೆ ಪ್ರಾರಂಭಗಳು, ಹಠಾತ್ ನಿಲುಗಡೆಗಳನ್ನು ಅನುಮತಿಸುತ್ತದೆ ಮತ್ತು ದೀರ್ಘಕಾಲದವರೆಗೆ ವಿಳಂಬವಾಗಬಹುದು. ηnom = 0.20 - 0.40 ದಕ್ಷತೆಯೊಂದಿಗೆ 50 Hz ಆವರ್ತನದೊಂದಿಗೆ ಪರ್ಯಾಯ ವೋಲ್ಟೇಜ್ ನೆಟ್ವರ್ಕ್ನಿಂದ ಕಾರ್ಯಾಚರಣೆಗಾಗಿ 0.5 ರಿಂದ 30 W ವರೆಗೆ ಎರಡು ಮತ್ತು ನಾಲ್ಕು-ಪೋಲ್ ರೇಟೆಡ್ ಶಕ್ತಿಯೊಂದಿಗೆ ಮತ್ತು 300 W ವರೆಗಿನ ಸುಧಾರಿತ ವಿನ್ಯಾಸದೊಂದಿಗೆ ಅವುಗಳನ್ನು ತಯಾರಿಸಲಾಗುತ್ತದೆ.
ಇದನ್ನೂ ಓದಿ: ಸೆಲ್ಸಿನ್ಸ್: ಉದ್ದೇಶ, ಸಾಧನ, ಕ್ರಿಯೆಯ ತತ್ವ
