ಸಮಯದ ಕಾರ್ಯವಾಗಿ ಮೋಟಾರ್ ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ಗಳು
 ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ನ ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ ಎಲ್ಲಾ ಸ್ವಿಚಿಂಗ್ ಸಮಯದ ಕೆಲವು ಕ್ಷಣಗಳಲ್ಲಿ ನಡೆದಾಗ ಈ ರೀತಿಯ ನಿಯಂತ್ರಣವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಉದಾಹರಣೆಗೆ, ವೇಗ ಅಥವಾ ಪ್ರವಾಹವನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡದೆಯೇ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ಗಳನ್ನು ಪ್ರಾರಂಭಿಸುವ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಸ್ವಯಂಚಾಲಿತಗೊಳಿಸಿದಾಗ. ಮಧ್ಯಂತರಗಳ ಅವಧಿಯನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಸಮಯದ ರಿಲೇ ಸೆಟ್ಟಿಂಗ್ಗಳಿಂದ ಸರಿಹೊಂದಿಸಬಹುದು.
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ನ ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ ಎಲ್ಲಾ ಸ್ವಿಚಿಂಗ್ ಸಮಯದ ಕೆಲವು ಕ್ಷಣಗಳಲ್ಲಿ ನಡೆದಾಗ ಈ ರೀತಿಯ ನಿಯಂತ್ರಣವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಉದಾಹರಣೆಗೆ, ವೇಗ ಅಥವಾ ಪ್ರವಾಹವನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡದೆಯೇ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ಗಳನ್ನು ಪ್ರಾರಂಭಿಸುವ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಸ್ವಯಂಚಾಲಿತಗೊಳಿಸಿದಾಗ. ಮಧ್ಯಂತರಗಳ ಅವಧಿಯನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಸಮಯದ ರಿಲೇ ಸೆಟ್ಟಿಂಗ್ಗಳಿಂದ ಸರಿಹೊಂದಿಸಬಹುದು.
ಸಾಮೂಹಿಕ ಉತ್ಪಾದನೆಯ ವಿದ್ಯುತ್ಕಾಂತೀಯ ಮತ್ತು ಎಲೆಕ್ಟ್ರಾನಿಕ್ ಸಮಯದ ಪ್ರಸಾರಗಳ ಸರಳತೆ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆಯಿಂದಾಗಿ ಸಮಯದ ನಿಯಂತ್ರಣವು ಉದ್ಯಮದಲ್ಲಿ ಹೆಚ್ಚಿನ ಹರಡುವಿಕೆಯನ್ನು ಪಡೆಯಿತು.
ಆದ್ದರಿಂದ, ಅಂಜೂರದಿಂದ. 1, a ಮತ್ತು b, ಲೈನ್ ಕಾಂಟಕ್ಟರ್ನ ಸಂಪರ್ಕ K ಅನ್ನು ಮುಚ್ಚುವ ಮೂಲಕ, Rheostat ನ ಸಂಪೂರ್ಣ ಪ್ರತಿರೋಧವನ್ನು ಆರ್ಮೇಚರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಸೇರಿಸಲಾಗುತ್ತದೆ, R1 + R2 + R3 ಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ ಮತ್ತು ಆರಂಭಿಕ ಪ್ರತಿರೋಧ ವಿಭಾಗಗಳ ಸೇರ್ಪಡೆ ನಿರ್ದಿಷ್ಟ ಸಮಯದ ಮಧ್ಯಂತರಗಳಲ್ಲಿ t1, t2 ಮತ್ತು t3 ಕೆಲವು ಎಂಜಿನ್ ವೇಗಗಳಲ್ಲಿ n1, n2, n3 ನಲ್ಲಿ ಸಂಭವಿಸಬಹುದು ಮತ್ತು ಇನ್ರಶ್ ಕರೆಂಟ್ ಸೆಟ್ ಮೌಲ್ಯ I2 ಗೆ ಇಳಿದಾಗ. ಸಮಯದ ಮಧ್ಯಂತರಗಳನ್ನು ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ ಆದ್ದರಿಂದ ಪ್ರತಿರೋಧದ ಪ್ರತಿ ನಂತರದ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ನೊಂದಿಗೆ, ಮೋಟಾರು ಪ್ರವಾಹವು ಅನುಮತಿಸುವ I1 ಅನ್ನು ಮೀರುವುದಿಲ್ಲ.
ಮೋಟಾರ್ n = 0 ರಿಂದ n1 ಗೆ ವೇಗವನ್ನು ಹೆಚ್ಚಿಸಿದಾಗ, ಹಿಂದಿನ ಎಲೆಕ್ಟ್ರೋಮೋಟಿವ್ ಫೋರ್ಸ್ನ ಹೆಚ್ಚಳದ ಪರಿಣಾಮವಾಗಿ ಪ್ರಸ್ತುತವು I2 ಗೆ ಕಡಿಮೆಯಾಗುತ್ತದೆ. ಸಮಯದ ಮಧ್ಯಂತರ t1 ನಂತರ, ಸಂಪರ್ಕ K1 ಮುಚ್ಚುತ್ತದೆ, ಪ್ರತಿರೋಧ R1 ಅನ್ನು ಶಂಟಿಂಗ್ ಮಾಡುತ್ತದೆ, ಇದು R2 + R3 ಗೆ rheostat ನ ಪ್ರತಿರೋಧದಲ್ಲಿ ಇಳಿಕೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ, I1 ಗೆ ಪ್ರಸ್ತುತದಲ್ಲಿ ಹೊಸ ಹೆಚ್ಚಳ, ಇತ್ಯಾದಿ. ಪ್ರಾರಂಭದ ಕೊನೆಯಲ್ಲಿ, ಮೋಟಾರು ದರದ ವೇಗಕ್ಕೆ ವೇಗವನ್ನು ನೀಡುತ್ತದೆ, ಆರಂಭಿಕ ರಿಯೊಸ್ಟಾಟ್ ಅನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ತೆಗೆದುಹಾಕಲಾಗುತ್ತದೆ.
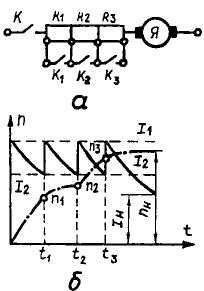
ಅಕ್ಕಿ. 1. ಸಮಯದ ಕಾರ್ಯವಾಗಿ ಮೋಟಾರ್ ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ಗಳು: a — DC ಮೋಟಾರ್ ಸ್ಟಾರ್ಟಿಂಗ್ rheostat, b — ಆರಂಭಿಕ ರೇಖಾಚಿತ್ರ
ಕೆಲವು ಮೋಟಾರ್ ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ಗಳನ್ನು ಸಮಯದ ಕಾರ್ಯವಾಗಿ ಪರಿಗಣಿಸಿ.
ಗಾಯದ ರೋಟರ್ (Fig. 2) ನೊಂದಿಗೆ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ನ ಸಮಯ-ಅವಲಂಬಿತ ನಿಯಂತ್ರಣದಲ್ಲಿ, ಆರಂಭಿಕ ರಿಯೊಸ್ಟಾಟ್ನ ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಪ್ರತ್ಯೇಕ ಹಂತಗಳಿಗೆ ಅಗತ್ಯವಿರುವ ಸಮಯದ ವಿಳಂಬವನ್ನು ಲೋಲಕದ ಸಮಯದ ಪ್ರಸಾರಗಳಿಂದ ಒದಗಿಸಲಾಗುತ್ತದೆ, ಅದರ ಸಂಖ್ಯೆಯು ಸಂಖ್ಯೆಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ ಹಂತಗಳು. ಯೋಜನೆಯು ಈ ಕೆಳಗಿನಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ.
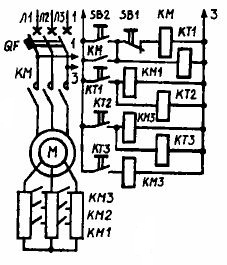
ಅಕ್ಕಿ. 2. ಗಾಯ-ರೋಟರ್ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಸಮಯದ ಕಾರ್ಯವಾಗಿ ಕಂಟ್ರೋಲ್ ಸರ್ಕ್ಯೂಟ್
ನೀವು ಕ್ಲಿಕ್ ಮಾಡಿದಾಗ ಬಟನ್ SB1 KM ಲೈನ್ನಲ್ಲಿ ಕಾಂಟಕ್ಟರ್ ಕಾಯಿಲ್ಗೆ ಶಕ್ತಿಯನ್ನು ಪಡೆಯುತ್ತದೆ, ಇದು ಮೋಟಾರ್ ಸ್ಟೇಟರ್ ಅನ್ನು ಮುಖ್ಯಕ್ಕೆ ಸಂಪರ್ಕಿಸುತ್ತದೆ. ಅದೇ ಸಮಯದಲ್ಲಿ, ಔಟ್ಪುಟ್ ರಿಯೋಸ್ಟಾಟ್ ಅನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ಪರಿಚಯಿಸಲಾಗಿದೆ. ಸಂಪರ್ಕಕಾರರೊಂದಿಗೆ, ಸಮಯ ರಿಲೇ KT1 ಅನ್ನು ಆನ್ ಮಾಡಲಾಗಿದೆ, ಇದು ನಿರ್ದಿಷ್ಟ ಸಮಯದ ಮಧ್ಯಂತರದ ನಂತರ ಸಂಪರ್ಕಕಾರ KM1 ನ ಸುರುಳಿಯ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಸಂಪರ್ಕವನ್ನು ಮುಚ್ಚುತ್ತದೆ.
ರೋಟರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸಲು ಕಾಂಟ್ಯಾಕ್ಟರ್ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ ಮತ್ತು ರಿಯೋಸ್ಟಾಟ್ನ ಮೊದಲ ವಿಭಾಗವನ್ನು ಮುಚ್ಚುತ್ತದೆ. ಅದೇ ಸಮಯದಲ್ಲಿ, ಟೈಮ್ ರಿಲೇ KT2 ಆನ್ ಆಗುತ್ತದೆ, ಇದು ವಿಳಂಬದೊಂದಿಗೆ ಅದರ ಸಂಪರ್ಕಗಳನ್ನು ಮುಚ್ಚುತ್ತದೆ ಮತ್ತು ಕಾಯಿಲ್ KM2 ಮತ್ತು ಟೈಮ್ ರಿಲೇ KTZ ಅನ್ನು ಆನ್ ಮಾಡುತ್ತದೆ. ಸಂಪರ್ಕಗಾರ KM2 ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ನ ಸಂಪರ್ಕಗಳು ಆರಂಭಿಕ rheostat ನ ಎರಡನೇ ಹಂತದ KM2.ಹೆಚ್ಚುವರಿಯಾಗಿ, ಸಮಯ ವಿಳಂಬದೊಂದಿಗೆ, KTZ ರಿಲೇಯ ಸಂಪರ್ಕವನ್ನು ಪ್ರಚೋದಿಸಲಾಗುತ್ತದೆ, KMZ ವಿಂಡಿಂಗ್ ಅನ್ನು ಆನ್ ಮಾಡುತ್ತದೆ, ಇದು KMZ ಆರಂಭಿಕ ರಿಯೋಸ್ಟಾಟ್ನ ಕೊನೆಯ ಹಂತದ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಮಾಡುತ್ತದೆ ಮತ್ತು ಭವಿಷ್ಯದಲ್ಲಿ ಮೋಟಾರ್ ಕೆಲಸ ಮಾಡುವುದನ್ನು ಮುಂದುವರಿಸುತ್ತದೆ. ಒಂದು ಅಳಿಲು ರೋಟರ್.
ಎಸ್ಬಿ ಗುಂಡಿಯನ್ನು ಒತ್ತುವ ಮೂಲಕ ಮೋಟಾರ್ ಅನ್ನು ನಿಲ್ಲಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಓವರ್ಲೋಡ್ನ ಸಂದರ್ಭದಲ್ಲಿ, ಕ್ಯೂಎಫ್ ಸ್ವಿಚ್ ಅನ್ನು ಬಿಡುಗಡೆ ಮಾಡುವ ಮೂಲಕ ಮೋಟಾರ್ ಅನ್ನು ಸ್ವಿಚ್ ಆಫ್ ಮಾಡಲಾಗುತ್ತದೆ. ಇದು ಲೈನ್ ಕಾಂಟ್ಯಾಕ್ಟರ್, ಅದರ ಸಹಾಯಕ ಸಂಪರ್ಕ KM ಮತ್ತು ಎಲ್ಲಾ ವೇಗವರ್ಧಕ ಸಂಪರ್ಕಕಾರರು ಮತ್ತು ಸಮಯ ವಿಳಂಬವಲ್ಲದ ಸಮಯ ಪ್ರಸಾರಗಳನ್ನು ಆಫ್ ಮಾಡುತ್ತದೆ. ಮುಂದಿನ ಚಕ್ರಕ್ಕೆ ಸರಪಳಿ ಸಿದ್ಧವಾಗಿದೆ.
ನಕ್ಷತ್ರದಿಂದ ಡೆಲ್ಟಾಕ್ಕೆ ಸ್ಟೇಟರ್ ಅಂಕುಡೊಂಕಾದ ಸ್ವಿಚಿಂಗ್ನೊಂದಿಗೆ ಹೆಚ್ಚಿದ ಶಕ್ತಿಯೊಂದಿಗೆ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಐಡಲ್ ವೇಗವನ್ನು ಪ್ರಾರಂಭಿಸಲು, ನೀವು ಅಂಜೂರದಲ್ಲಿ ರೇಖಾಚಿತ್ರವನ್ನು ಬಳಸಬಹುದು. 3. ಈ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಸ್ವಿಚಿಂಗ್ ಸಮಯದ ಕಾರ್ಯವಾಗಿ ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಮಾಡಲಾಗುತ್ತದೆ SB2 ಗುಂಡಿಯನ್ನು ಒತ್ತುವ ಮೂಲಕ, ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ಸಂಪರ್ಕಕ KM ಮೂಲಕ ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ. ಅದೇ ಸಮಯದಲ್ಲಿ, ಟೈಮ್ ರಿಲೇ KT ಮತ್ತು ಕಾಯಿಲ್ KY ಅನ್ನು ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಇದು ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಮೂರು ಸಂಪರ್ಕಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಸ್ಟಾರ್ಗೆ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ಸಂಪರ್ಕಿಸುತ್ತದೆ.
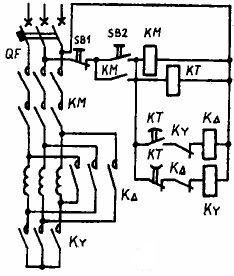
ಅಕ್ಕಿ. 3. Y ನಿಂದ Δ ಗೆ ಬದಲಾಯಿಸುವ ಮೂಲಕ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ನ ಸಮಯದ ಕಾರ್ಯವಾಗಿ ಕಂಟ್ರೋಲ್ ಸರ್ಕ್ಯೂಟ್
ಕಡಿಮೆ ವೋಲ್ಟೇಜ್ನಲ್ಲಿ ಮೋಟಾರ್ ಪ್ರಾರಂಭವಾಗುತ್ತದೆ ಮತ್ತು ವೇಗಗೊಳ್ಳುತ್ತದೆ. ಪೂರ್ವನಿರ್ಧರಿತ ಸಮಯದ ಮಧ್ಯಂತರದ ನಂತರ, KT ರಿಲೇ KY ಕಾಂಟಕ್ಟರ್ ಅನ್ನು ಆಫ್ ಮಾಡುತ್ತದೆ ಮತ್ತು ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ಡೆಲ್ಟಾಗೆ ಸಂಪರ್ಕಿಸುವ KΔ ಕಾಂಟಕ್ಟರ್ನ ಸುರುಳಿಯನ್ನು ಆನ್ ಮಾಡುತ್ತದೆ. ಕಾಯಿಲ್ K∆ ನ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಸಹಾಯಕ ಸಂಪರ್ಕ KY ಇರುವುದರಿಂದ, ಸಂಪರ್ಕಕಾರ KMY ಅನ್ನು ಮುಚ್ಚುವ ಮೊದಲು ಸಂಪರ್ಕಕಾರ K∆ ಅನ್ನು ಮುಚ್ಚುವುದು ಸಂಭವಿಸುವುದಿಲ್ಲ.
ಮಲ್ಟಿ-ಸ್ಪೀಡ್ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ಗಳ ಹಂತ ಹಂತದ ಪ್ರಾರಂಭವು ಹೆಚ್ಚು ಆರ್ಥಿಕವಾಗಿರುತ್ತದೆ ಮತ್ತು ಸಮಯದ ಕಾರ್ಯವಾಗಿ ಮಾಡಲಾಗುತ್ತದೆ.ಒಂದೇ ಅಂಕುಡೊಂಕಾದ (ಅಂಜೂರ 4) ಎರಡು-ವೇಗದ ಮೋಟರ್ನ ಹಂತ-ಹಂತದ ಪ್ರಾರಂಭದ ಉದಾಹರಣೆಯನ್ನು ಪರಿಗಣಿಸೋಣ. ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಎರಡು ವೇಗದಲ್ಲಿ ಡೆಲ್ಟಾದಿಂದ ಡಬಲ್ ಸ್ಟಾರ್ಗೆ ಹೋಗುತ್ತದೆ.
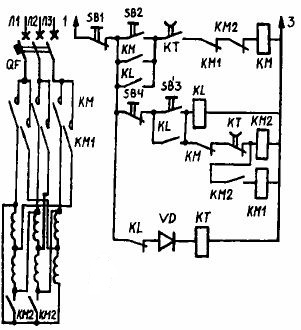
ಅಕ್ಕಿ. 4. ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ ಹಂತದ ಪ್ರಾರಂಭದ ಸಮಯದ ಕಾರ್ಯವಾಗಿ ಕಂಟ್ರೋಲ್ ಸರ್ಕ್ಯೂಟ್
ಮೊದಲ ವೇಗದ ಹಂತಕ್ಕೆ ಕಾಂಟ್ಯಾಕ್ಟರ್ KM ನಿಂದ ಮೋಟರ್ ಅನ್ನು ಸ್ವಿಚ್ ಮಾಡಲಾಗಿದೆ, ಮತ್ತು ಸಂಪರ್ಕಕಾರರು KM2 ಮತ್ತು KM1 ಎರಡನೆಯದಕ್ಕೆ. ಮೋಟರ್ ಅನ್ನು ಮೊದಲ ವೇಗಕ್ಕೆ ಆನ್ ಮಾಡಲು, ಬಟನ್ SB2 ಅನ್ನು ಒತ್ತುವ ಮೂಲಕ ಮುಖ್ಯ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ KM ಮತ್ತು ಅದರ ವಿದ್ಯುತ್ ಸಂಪರ್ಕಗಳು KM ನ ಕಾಯಿಲ್ ಅನ್ನು ಆನ್ ಮಾಡುತ್ತದೆ. ಡೆಲ್ಟಾ ಸಂಪರ್ಕಿತ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ. ಸಮಯದ ರಿಲೇ KT ಯ ಸುರುಳಿಯು ಶಕ್ತಿಯುತವಾಗಿದೆ, ಮತ್ತು ಅದರ ಮುಚ್ಚುವ ಸಂಪರ್ಕವನ್ನು (ಕಾಯಿಲ್ KM ನ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ) ಮುಚ್ಚಲಾಗಿದೆ.
 ತಿರುಗುವಿಕೆಯ ಎರಡನೇ ವೇಗದಲ್ಲಿ ಎಂಜಿನ್ನ ಹಂತ-ಹಂತದ ಪ್ರಾರಂಭವನ್ನು ಮಧ್ಯಂತರ ರಿಲೇ ಕೆ ಬಳಸಿ ನಡೆಸಲಾಗುತ್ತದೆ, ಅದರ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಸ್ಟಾರ್ಟ್ ಬಟನ್ SB3 ನಿಂದ ಮುಚ್ಚಲಾಗುತ್ತದೆ. K ಮುಚ್ಚುವ ಸಂಪರ್ಕಗಳು ಎರಡು ಪ್ರಾರಂಭ ಬಟನ್ಗಳನ್ನು ಬೈಪಾಸ್ ಮಾಡುತ್ತವೆ ಮತ್ತು K ತೆರೆಯುವ ಸಂಪರ್ಕವು KT ಟೈಮ್ ರಿಲೇಯನ್ನು ಡಿ-ಎನರ್ಜೈಸ್ ಮಾಡುತ್ತದೆ. ಕಾಯಿಲ್ KM ನ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಮುಚ್ಚುವ ಸಂಪರ್ಕ KT ರಿಟರ್ನ್ ವಿಳಂಬದೊಂದಿಗೆ ಆಫ್ ಆಗುತ್ತದೆ, ಇದರಿಂದಾಗಿ ಪ್ರಾರಂಭದ ಮೊದಲ ಅವಧಿಯಲ್ಲಿ ಕಾಯಿಲ್ KM ಮುಚ್ಚಲ್ಪಟ್ಟಿದೆ ಮತ್ತು ಮೋಟಾರ್ ಮೊದಲ ವೇಗದಲ್ಲಿ ಆನ್ ಆಗುತ್ತದೆ.
ತಿರುಗುವಿಕೆಯ ಎರಡನೇ ವೇಗದಲ್ಲಿ ಎಂಜಿನ್ನ ಹಂತ-ಹಂತದ ಪ್ರಾರಂಭವನ್ನು ಮಧ್ಯಂತರ ರಿಲೇ ಕೆ ಬಳಸಿ ನಡೆಸಲಾಗುತ್ತದೆ, ಅದರ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಸ್ಟಾರ್ಟ್ ಬಟನ್ SB3 ನಿಂದ ಮುಚ್ಚಲಾಗುತ್ತದೆ. K ಮುಚ್ಚುವ ಸಂಪರ್ಕಗಳು ಎರಡು ಪ್ರಾರಂಭ ಬಟನ್ಗಳನ್ನು ಬೈಪಾಸ್ ಮಾಡುತ್ತವೆ ಮತ್ತು K ತೆರೆಯುವ ಸಂಪರ್ಕವು KT ಟೈಮ್ ರಿಲೇಯನ್ನು ಡಿ-ಎನರ್ಜೈಸ್ ಮಾಡುತ್ತದೆ. ಕಾಯಿಲ್ KM ನ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಮುಚ್ಚುವ ಸಂಪರ್ಕ KT ರಿಟರ್ನ್ ವಿಳಂಬದೊಂದಿಗೆ ಆಫ್ ಆಗುತ್ತದೆ, ಇದರಿಂದಾಗಿ ಪ್ರಾರಂಭದ ಮೊದಲ ಅವಧಿಯಲ್ಲಿ ಕಾಯಿಲ್ KM ಮುಚ್ಚಲ್ಪಟ್ಟಿದೆ ಮತ್ತು ಮೋಟಾರ್ ಮೊದಲ ವೇಗದಲ್ಲಿ ಆನ್ ಆಗುತ್ತದೆ.
ಕಾಯಿಲ್ KM2 ಮತ್ತು KM1 ರ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ KM ಬ್ಲಾಕ್ನ ಸಂಪರ್ಕವು ತೆರೆಯುತ್ತದೆ. ಈ ಸುರುಳಿಗಳನ್ನು ತೆರೆದ ಸಂಪರ್ಕ KT ಯಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸಲಾಗಿದೆ, ಇದು ಹಿಂತಿರುಗುವಾಗ ವಿಳಂಬವಾಗುತ್ತದೆ. ನಿರ್ದಿಷ್ಟ ಅವಧಿಯ ನಂತರ, ಮುಚ್ಚುವ ಸಂಪರ್ಕ KT ಕಾಯಿಲ್ KM ಅನ್ನು ಆಫ್ ಮಾಡುತ್ತದೆ ಮತ್ತು ಅದರ ಆರಂಭಿಕ ಸಂಪರ್ಕವು KM1 ಮತ್ತು KM2 ತಿರುಗುವಿಕೆಯ ಎರಡನೇ ವೇಗದ ಸಂಪರ್ಕಕಾರರ ಸುರುಳಿಗಳನ್ನು ಆನ್ ಮಾಡುತ್ತದೆ. ಸರಬರಾಜು ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ ಅವರ ಮುಖ್ಯ ಸಂಪರ್ಕಗಳು ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ಡಬಲ್ ಸ್ಟಾರ್ಗೆ ಬದಲಾಯಿಸುತ್ತದೆ ಮತ್ತು ಅದನ್ನು ಮುಖ್ಯಕ್ಕೆ ಸಂಪರ್ಕಿಸುತ್ತದೆ.
ಆದ್ದರಿಂದ, ಎಂಜಿನ್ ಮೊದಲು ಮೊದಲ ಗೇರ್ಗೆ ವೇಗವನ್ನು ನೀಡುತ್ತದೆ ಮತ್ತು ನಂತರ ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಎರಡನೇ ಗೇರ್ಗೆ ಬದಲಾಗುತ್ತದೆ. ಎರಡು ನಕ್ಷತ್ರಗಳಿಗೆ ಸ್ಟೇಟರ್ ಅಂಕುಡೊಂಕಾದ ಪ್ರಾಥಮಿಕ ಸಂಪರ್ಕ ಮತ್ತು ನೆಟ್ವರ್ಕ್ನಲ್ಲಿ ಅದರ ನಂತರದ ಸೇರ್ಪಡೆಯು ವಿದ್ಯುತ್ ಸರಬರಾಜು KM2 ನ ಎರಡು ಮುಚ್ಚುವ ಸಂಪರ್ಕಗಳನ್ನು ಆನ್ ಮಾಡುವ ಮೂಲಕ ಮೊದಲು ಕೈಗೊಳ್ಳಲಾಗುತ್ತದೆ ಮತ್ತು ನಂತರ ಮೂರು ಮುಚ್ಚುವ ಮುಖ್ಯ ಸಂಪರ್ಕಗಳು KM1. ಅಂತಹ ಸ್ವಿಚಿಂಗ್ ಅನುಕ್ರಮವನ್ನು ಸುರುಳಿ KM1 ಅನ್ನು ಮುಚ್ಚುವ ಬ್ಲಾಕ್ KM2 ನ ಸಂಪರ್ಕದ ಮೂಲಕ ವೋಲ್ಟೇಜ್ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ ಎಂಬ ಅಂಶದಿಂದ ಸಾಧಿಸಲಾಗುತ್ತದೆ. "ನಿಲ್ಲಿಸು" ಗುಂಡಿಯನ್ನು ಒತ್ತುವ ಮೂಲಕ ಎಂಜಿನ್ ಅನ್ನು ನಿಲ್ಲಿಸಲಾಗುತ್ತದೆ, ರೇಖಾಚಿತ್ರದಲ್ಲಿ SB1 ಅಕ್ಷರದೊಂದಿಗೆ ಗುರುತಿಸಲಾಗಿದೆ.
ಅಂಜೂರದಲ್ಲಿ. 5 ಸಮಯದ ಕಾರ್ಯವಾಗಿ ಸಮಾನಾಂತರ-ಪ್ರಚೋದಿತ DC ಮೋಟರ್ನ ಸ್ವಯಂಚಾಲಿತ ಪ್ರಾರಂಭದ ರೇಖಾಚಿತ್ರವನ್ನು ತೋರಿಸುತ್ತದೆ. QF ಸರ್ಕ್ಯೂಟ್ ಬ್ರೇಕರ್ ಅನ್ನು ಮುಚ್ಚುವ ಮೂಲಕ, ಮೋಟಾರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸಲು ತಯಾರಿಸಲಾಗುತ್ತದೆ. ಸಮಯದ ರಿಲೇ KT1 ನ ಅಂಕುಡೊಂಕಾದ, ಮೋಟಾರ್ M ನ ಆರ್ಮೇಚರ್ ಮತ್ತು ಆರಂಭಿಕ rheostat R1 + R2 ನ ಎರಡು ಹಂತಗಳನ್ನು ಒಳಗೊಂಡಿರುವ ಸರ್ಕ್ಯೂಟ್ ಮೂಲಕ ಪ್ರಸ್ತುತ ಹರಿಯುತ್ತದೆ.
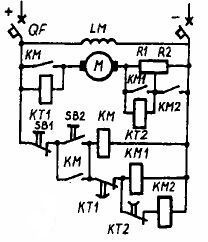
ಅಕ್ಕಿ. 5. ಪ್ರಚೋದಿತ DC ಮೋಟಾರ್ನ ಸಮಯದ ಕಾರ್ಯವಾಗಿ ಕಂಟ್ರೋಲ್ ಸರ್ಕ್ಯೂಟ್
ರಿಲೇ KT1 ನ ಸುರುಳಿಯ ಹೆಚ್ಚಿನ ಪ್ರತಿರೋಧದಿಂದಾಗಿ, ಈ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ ಪ್ರಸ್ತುತವು ತುಂಬಾ ಚಿಕ್ಕದಾಗಿದೆ ಮತ್ತು ಮೋಟರ್ನಲ್ಲಿ ಯಾವುದೇ ಪರಿಣಾಮ ಬೀರುವುದಿಲ್ಲ, ಆದರೆ ರಿಲೇ ಸ್ವತಃ ಪ್ರಚೋದಿಸಲ್ಪಡುತ್ತದೆ ಮತ್ತು ಸಂಪರ್ಕಕಾರಕ KM1 ನ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಅದರ ತೆರೆದ ಸಂಪರ್ಕವು ತೆರೆಯುತ್ತದೆ. ಎರಡನೇ ಬಾರಿಗೆ ರಿಲೇ KT2 ನ ಸುರುಳಿಯಲ್ಲಿ, ಪ್ರತಿರೋಧ R1 ನೊಂದಿಗೆ ಸಮಾನಾಂತರವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಅಂತಹ ಒಂದು ಸಣ್ಣ ಪ್ರವಾಹವನ್ನು ಕವಲೊಡೆಯಲಾಗಿದ್ದು, ಅದನ್ನು ಆನ್ ಮಾಡಲಾಗುವುದಿಲ್ಲ. ಮೋಟಾರ್ನ LM ಫೀಲ್ಡ್ ವಿಂಡಿಂಗ್ ಸಹ ಆನ್ ಆಗುತ್ತದೆ.
SB2 ಗುಂಡಿಯನ್ನು ಒತ್ತುವ ಮೂಲಕ ಮೋಟಾರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸಲಾಗುತ್ತದೆ. ಅದೇ ಸಮಯದಲ್ಲಿ, ಮೋಟರ್ನ ಆರ್ಮೇಚರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಕಾಂಟ್ಯಾಕ್ಟರ್ KM ಮತ್ತು ಅದರ ಸಂಪರ್ಕವನ್ನು ಆನ್ ಮಾಡಲಾಗಿದೆ. ದೊಡ್ಡ ಆರಂಭಿಕ ಪ್ರವಾಹವು R1 ಮತ್ತು R2 ಎಂಬ ಎರಡು rheostat ಹಂತಗಳಿಂದ ಸೀಮಿತವಾಗಿದೆ.ಈ ಪ್ರವಾಹದ ಭಾಗವು KT2 ರಿಲೇಯ ಸುರುಳಿಯೊಳಗೆ ಕವಲೊಡೆಯುತ್ತದೆ ಮತ್ತು ಅದು KM2 ಕಾಂಟಕ್ಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಅದರ KT2 ಸಂಪರ್ಕವನ್ನು ತೆರೆಯುತ್ತದೆ. ಏಕಕಾಲದಲ್ಲಿ ಆರ್ಮೇಚರ್ ಸರ್ಕ್ಯೂಟ್ M ಅನ್ನು ಮುಚ್ಚುವುದರೊಂದಿಗೆ, ಸಂಪರ್ಕಕಾರ KM ನ ಕೆಲಸದ ಸಂಪರ್ಕವು ರಿಲೇ KT1 ನ ಸುರುಳಿಯನ್ನು ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಮಾಡುತ್ತದೆ.
ರಿಲೇ ಹಿಂತಿರುಗಿದಾಗ ನಿರ್ದಿಷ್ಟ ಸಮಯದ ಮಧ್ಯಂತರದ ನಂತರ, KT1 ಅದರ KT1 ಸಂಪರ್ಕವನ್ನು KM1 ಕಾಂಟಕ್ಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಮುಚ್ಚುತ್ತದೆ. ಅದರ ಕೆಲಸದ ಸಂಪರ್ಕ KM1 ನೊಂದಿಗೆ ಈ ಸಂಪರ್ಕಕಾರಕವು ಆರಂಭಿಕ rheostat ನ ಮೊದಲ ಹಂತದ R1 ಮತ್ತು ಸಮಯದ ರಿಲೇ KT2 ನ ಅಂಕುಡೊಂಕಾದ ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಮಾಡುತ್ತದೆ. ಹಿಂತಿರುಗುವ ವಿಳಂಬದೊಂದಿಗೆ, ಅದರ ಕೆಲಸದ ಸಂಪರ್ಕಗಳು KT2 ಸಂಪರ್ಕಕಾರ KM2 ಅನ್ನು ಆನ್ ಮಾಡುತ್ತದೆ, ಅದರ ಕೆಲಸದ ಸಂಪರ್ಕಗಳೊಂದಿಗೆ KM2 ಆರಂಭಿಕ ರಿಯೋಸ್ಟಾಟ್ನ ಎರಡನೇ ಹಂತದ R2 ಅನ್ನು ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಮಾಡುತ್ತದೆ. ಇದು ಎಂಜಿನ್ ಪ್ರಾರಂಭವನ್ನು ಪೂರ್ಣಗೊಳಿಸುತ್ತದೆ.
SB1 ಗುಂಡಿಯನ್ನು ಒತ್ತಿದಾಗ, KM ಸಂಪರ್ಕಕವು ಆರ್ಮೇಚರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಅದರ ಮುಖ್ಯ ಸಂಪರ್ಕವನ್ನು ಟ್ರಿಪ್ ಮಾಡುತ್ತದೆ ಮತ್ತು ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸುತ್ತದೆ. ಆರ್ಮೇಚರ್ ಶಕ್ತಿಯುತವಾಗಿ ಉಳಿದಿದೆ, ಆದರೆ ಇದು ರಿಲೇ ಕಾಯಿಲ್ KT1 ನೊಂದಿಗೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ ಎಂದು ಅದು ತಿರುಗುತ್ತದೆ, ಅದರ ಮೂಲಕ ಸಣ್ಣ ಪ್ರವಾಹವು ಅದರ ಮೂಲಕ ಹರಿಯುತ್ತದೆ. ರಿಲೇ KT1 ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಸಂಪರ್ಕಕಾರರ KM1 ಮತ್ತು KM2 ರ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಅದರ ಸಂಪರ್ಕವನ್ನು ತೆರೆಯುತ್ತದೆ, ಅವರು ಆಫ್ ಮಾಡುತ್ತಾರೆ ಮತ್ತು ತಮ್ಮ ಸಂಪರ್ಕಗಳನ್ನು ತೆರೆಯುತ್ತಾರೆ, ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಪ್ರತಿರೋಧಗಳು R1 ಮತ್ತು R2. ಮೋಟಾರ್ ನಿಲ್ಲುತ್ತದೆ, ಆದರೆ ಅದರ ಕ್ಷೇತ್ರ ಅಂಕುಡೊಂಕಾದ ಮುಖ್ಯ ಸಂಪರ್ಕ ಉಳಿದಿದೆ ಮತ್ತು ಆದ್ದರಿಂದ ಮೋಟಾರ್ ಮುಂದಿನ ಆರಂಭಕ್ಕೆ ತಯಾರಿಸಲಾಗುತ್ತದೆ. ಸ್ವಯಂಚಾಲಿತ ಇನ್ಪುಟ್ ಸ್ವಿಚ್ ಬಿಬಿ ಅನ್ನು ಆಫ್ ಮಾಡುವ ಮೂಲಕ ಎಂಜಿನ್ನ ಸಂಪೂರ್ಣ ಸ್ಥಗಿತಗೊಳಿಸುವಿಕೆಯನ್ನು ಮಾಡಲಾಗುತ್ತದೆ.
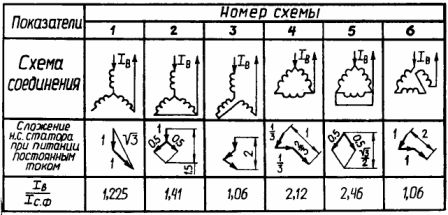
ಮೋಟಾರುಗಳ ಡೈನಾಮಿಕ್ ಬ್ರೇಕಿಂಗ್ ಅನ್ನು ಸಮಯದ ಕಾರ್ಯವಾಗಿ ನಿರ್ವಹಿಸಲಾಗುತ್ತದೆ. ಡೈನಾಮಿಕ್ ಬ್ರೇಕಿಂಗ್ಗಾಗಿ, ಉದಾಹರಣೆಗೆ, ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್, ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ಪರ್ಯಾಯ ವಿದ್ಯುತ್ ಜಾಲದಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸಲಾಗಿದೆ ಮತ್ತು ಟೇಬಲ್ 1 ರಲ್ಲಿ ತೋರಿಸಿರುವ ಸ್ಕೀಮ್ಗಳ ಪ್ರಕಾರ, ನೇರ ಪ್ರವಾಹದ ಮೂಲಕ್ಕೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ.ಅರಣ್ಯ ಮತ್ತು ಮರಗೆಲಸ ಉದ್ಯಮದಲ್ಲಿ, ವಿಶೇಷ ಸೆಮಿಕಂಡಕ್ಟರ್ ರಿಕ್ಟಿಫೈಯರ್ಗಳಿಂದ ನೇರ ಪ್ರವಾಹವನ್ನು ಪಡೆಯಲಾಗುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ನೇರ ಪ್ರವಾಹದ ವಿಶೇಷ ಮೂಲ ಅಗತ್ಯವಿಲ್ಲ.
ಸ್ಕೀಮ್ಗಳಲ್ಲಿ ಒಂದರ ಪ್ರಕಾರ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ಆನ್ ಮಾಡಿದಾಗ (ಟೇಬಲ್ 1 ನೋಡಿ), ರೆಕ್ಟಿಫೈಯರ್ಗೆ ಅಂಕುಡೊಂಕಾದ ಸ್ಥಾಯಿ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ರಚಿಸಲಾಗುತ್ತದೆ. ಸ್ಥಾಯಿ ಕ್ಷೇತ್ರದಲ್ಲಿ, ಮೋಟರ್ನ ರೋಟರ್ ಜಡತ್ವದಿಂದ ತಿರುಗುವುದನ್ನು ಮುಂದುವರೆಸುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಮೋಟರ್ನ ರೋಟರ್ನಲ್ಲಿ ಪರ್ಯಾಯ ಇಎಮ್ಎಫ್ ಮತ್ತು ಪ್ರವಾಹವನ್ನು ರಚಿಸಲಾಗುತ್ತದೆ, ಇದು ಪರ್ಯಾಯ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ಪ್ರಚೋದಿಸುತ್ತದೆ. ಸ್ಟೇಟರ್ನ ಸ್ಥಾಯಿ ಕ್ಷೇತ್ರದೊಂದಿಗೆ ಸಂವಹನ ಮಾಡುವಾಗ ರೋಟರ್ನ ಬದಲಾಗುತ್ತಿರುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವು ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್ ಅನ್ನು ರಚಿಸುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ರೋಟರ್ ಮತ್ತು ಡ್ರೈವಿನಿಂದ ಸಂಗ್ರಹಿಸಲಾದ ಚಲನ ಶಕ್ತಿಯನ್ನು ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ಗಳಲ್ಲಿ ವಿದ್ಯುತ್ ಶಕ್ತಿಯಾಗಿ ಪರಿವರ್ತಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಎರಡನೆಯದು ಶಾಖವಾಗಿ ಬದಲಾಗುತ್ತದೆ.
ಉಷ್ಣ ಶಕ್ತಿಯು ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಿಂದ ಪರಿಸರಕ್ಕೆ ಹರಡುತ್ತದೆ. ರೋಟರ್ನಲ್ಲಿ ಉತ್ಪತ್ತಿಯಾಗುವ ಶಾಖವು ಮೋಟರ್ ಅನ್ನು ಬಿಸಿ ಮಾಡುತ್ತದೆ. ಬಿಡುಗಡೆಯಾದ ಶಾಖದ ಪ್ರಮಾಣವು ನೇರ ಪ್ರವಾಹದೊಂದಿಗೆ ಸರಬರಾಜು ಮಾಡಿದಾಗ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನಲ್ಲಿನ ಪ್ರವಾಹವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ. ನೇರ ಪ್ರವಾಹದೊಂದಿಗೆ ಸರಬರಾಜು ಮಾಡಿದಾಗ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ಆನ್ ಮಾಡಲು ಅಳವಡಿಸಿಕೊಂಡ ಯೋಜನೆಯನ್ನು ಅವಲಂಬಿಸಿ, ಸ್ಟೇಟರ್ನ ಹಂತದ ಪ್ರವಾಹಕ್ಕೆ ಪ್ರಸ್ತುತದ ಅನುಪಾತವು ವಿಭಿನ್ನವಾಗಿರುತ್ತದೆ. ವಿವಿಧ ಸ್ವಿಚಿಂಗ್ ಯೋಜನೆಗಳಿಗೆ ಈ ಪ್ರವಾಹಗಳ ಅನುಪಾತಗಳನ್ನು ಕೋಷ್ಟಕದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 1
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಡೈನಾಮಿಕ್ ಬ್ರೇಕಿಂಗ್ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 6.
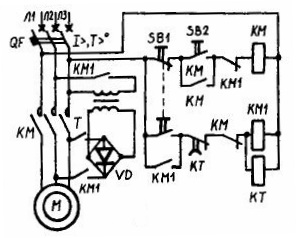
ಅಕ್ಕಿ. 6. ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಡೈನಾಮಿಕ್ ಬ್ರೇಕಿಂಗ್ನ ಯೋಜನೆ
ಪ್ರಾರಂಭ ಬಟನ್ SB1 ಅನ್ನು ಒತ್ತುವ ಮೂಲಕ, KM ಲೈನ್ ಸಂಪರ್ಕಕಾರನು AC ನೆಟ್ವರ್ಕ್ಗೆ ಮೋಟರ್ ಅನ್ನು ಆನ್ ಮಾಡುತ್ತದೆ, ಅದರ ಮುಚ್ಚುವ ಬ್ಲಾಕ್ ಸಂಪರ್ಕವು KM ಕಾಯಿಲ್ ಅನ್ನು ಸ್ವಯಂ-ಚಾಲಿತವಾಗಿ ಬದಲಾಯಿಸುತ್ತದೆ.ಆರಂಭಿಕ ಸಂಪರ್ಕ KM ಬ್ರೇಕ್ ಕಾಂಟಕ್ಟರ್ KM1 ಮತ್ತು ಸಮಯ ರಿಲೇ KT ಯ ಪೂರೈಕೆ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸುತ್ತದೆ. SB ಗುಂಡಿಯನ್ನು ಒತ್ತಿದಾಗ, KM ಲೈನ್ ಕಾಂಟಕ್ಟರ್ ಡಿ-ಎನರ್ಜೈಸ್ ಆಗಿರುತ್ತದೆ ಮತ್ತು KM1 ಕಾಂಟಕ್ಟರ್ ಕಾಯಿಲ್ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಶಕ್ತಿಯುತಗೊಳಿಸಲಾಗುತ್ತದೆ.
ಕಾಂಟಕ್ಟರ್ KM1 ಟ್ರಾನ್ಸ್ಫಾರ್ಮರ್ T ಮತ್ತು ರೆಕ್ಟಿಫೈಯರ್ V ಯ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಅದರ ಸಂಪರ್ಕಗಳನ್ನು KM1 ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ನೇರ ಪ್ರವಾಹದೊಂದಿಗೆ ಸರಬರಾಜು ಮಾಡಲಾಗುತ್ತದೆ. ಲೈನ್ ಕಾಂಟ್ಯಾಕ್ಟರ್ನ ಯಾದೃಚ್ಛಿಕ ಸ್ವತಂತ್ರ ಸ್ವಿಚಿಂಗ್ ಅನ್ನು ತಡೆಗಟ್ಟಲು, ಬ್ಲಾಕ್ KM1 ನ ಆರಂಭಿಕ ಸಂಪರ್ಕವು ಅದರ ಕಾಯಿಲ್ KM ನೊಂದಿಗೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಬ್ರೇಕ್ ಕಾಂಟಕ್ಟರ್ನೊಂದಿಗೆ ಏಕಕಾಲದಲ್ಲಿ, ಟೈಮ್ ರಿಲೇ KT ಅನ್ನು ಆನ್ ಮಾಡಲಾಗಿದೆ, ಅದನ್ನು ಕಾನ್ಫಿಗರ್ ಮಾಡಲಾಗಿದೆ ಆದ್ದರಿಂದ ಅದರ ತೆರೆದ ಸಂಪರ್ಕ KT ನಿರ್ದಿಷ್ಟ ಸಮಯದ ಮಧ್ಯಂತರದ ನಂತರ ಕಾಯಿಲ್ KM1 ಮತ್ತು ಸಮಯದ ಪ್ರಸಾರವನ್ನು ಆಫ್ ಮಾಡಿ. ಸಮಯ ರಿಲೇ ಸೆಟ್ಟಿಂಗ್ KT ಅನ್ನು ಆಯ್ಕೆಮಾಡಲಾಗಿದೆ ಆದ್ದರಿಂದ ರಿಲೇ ಆಕ್ಚುಯೇಶನ್ ಸಮಯ tkt ಮೋಟಾರ್ ಡಿಸಲರೇಶನ್ ಸಮಯ tT ಮತ್ತು ಸರಿಯಾದ ಕಾಂಟ್ಯಾಕ್ಟರ್ KM1 ಟ್ರಿಪ್ಪಿಂಗ್ ಸಮಯದ ಮೊತ್ತಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.