ಪರ್ಯಾಯ ವಿದ್ಯುತ್ ಯಂತ್ರಗಳು
ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯನ್ನು ವಿದ್ಯುತ್ ಶಕ್ತಿಯಾಗಿ (AC ಮತ್ತು DC ಜನರೇಟರ್ಗಳು) ಮತ್ತು ಪ್ರತಿಯಾಗಿ (ವಿದ್ಯುತ್ ಮೋಟಾರ್ಗಳು) ಪರಿವರ್ತಿಸಲು ಎಲೆಕ್ಟ್ರಿಕ್ ಯಂತ್ರಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
ಈ ಎಲ್ಲಾ ಸಂದರ್ಭಗಳಲ್ಲಿ, ವಿದ್ಯುತ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರದಲ್ಲಿ ಮೂಲಭೂತವಾಗಿ ಮೂರು ಪ್ರಮುಖ ಆವಿಷ್ಕಾರಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ: 1821 ರಲ್ಲಿ ಆಂಪಿಯರ್ ಕಂಡುಹಿಡಿದ ಪ್ರವಾಹಗಳ ಯಾಂತ್ರಿಕ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ವಿದ್ಯಮಾನ, 1831 ರಲ್ಲಿ ಫ್ಯಾರಡೆ ಕಂಡುಹಿಡಿದ ವಿದ್ಯುತ್ಕಾಂತೀಯ ಪ್ರಚೋದನೆಯ ವಿದ್ಯಮಾನ ಮತ್ತು ಈ ವಿದ್ಯಮಾನಗಳ ಸೈದ್ಧಾಂತಿಕ ಸಾರಾಂಶ ಲೆನ್ಜ್ (1834) ಪ್ರಚೋದಿತ ಪ್ರವಾಹದ ದಿಕ್ಕಿನ ತನ್ನ ಪ್ರಸಿದ್ಧ ಕಾನೂನಿನಲ್ಲಿ (ವಾಸ್ತವವಾಗಿ, ಲೆನ್ಜ್ನ ಕಾನೂನು ವಿದ್ಯುತ್ಕಾಂತೀಯ ಪ್ರಕ್ರಿಯೆಗಳಿಗೆ ಶಕ್ತಿಯ ಸಂರಕ್ಷಣೆಯ ನಿಯಮವನ್ನು ಊಹಿಸಿದೆ).

ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯನ್ನು ವಿದ್ಯುತ್ ಶಕ್ತಿಯನ್ನಾಗಿ ಪರಿವರ್ತಿಸಲು ಅಥವಾ ಪ್ರತಿಯಾಗಿ, ಪ್ರಸ್ತುತ ಮತ್ತು ಕಾಂತೀಯ ಕ್ಷೇತ್ರದೊಂದಿಗೆ (ಮ್ಯಾಗ್ನೆಟ್ ಅಥವಾ ಕರೆಂಟ್) ವಾಹಕ ಸರ್ಕ್ಯೂಟ್ನ ಸಾಪೇಕ್ಷ ಚಲನೆಯನ್ನು ರಚಿಸುವುದು ಅವಶ್ಯಕ.
ನಿರಂತರ ಕಾರ್ಯಾಚರಣೆಗಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಲಾದ ವಿದ್ಯುತ್ ಯಂತ್ರಗಳಲ್ಲಿ, ಸ್ಥಾಯಿ ಭಾಗ (ಸ್ಟೇಟರ್) ಒಳಗೆ ಇರುವ ಯಂತ್ರದ ಚಲಿಸುವ ಭಾಗದ (ಪರ್ಯಾಯ ವಿದ್ಯುತ್ ಯಂತ್ರದ ರೋಟರ್) ರೋಟರಿ ಚಲನೆಯನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.ಆಯಸ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ರಚಿಸಲು ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಯಂತ್ರದ ಸುರುಳಿಯನ್ನು ಇಂಡಕ್ಟರ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ ಮತ್ತು ಆಪರೇಟಿಂಗ್ ಕರೆಂಟ್ನೊಂದಿಗೆ ಹರಿಯುವ ಸುರುಳಿಯನ್ನು ಆರ್ಮೇಚರ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. ಈ ನಂತರದ ಎರಡೂ ಪದಗಳನ್ನು DC ಯಂತ್ರಗಳಿಗೆ ಸಹ ಬಳಸಲಾಗುತ್ತದೆ.
ಮ್ಯಾಗ್ನೆಟಿಕ್ ಇಂಡಕ್ಷನ್ ಅನ್ನು ಹೆಚ್ಚಿಸಲು, ಯಂತ್ರದ ವಿಂಡ್ಗಳನ್ನು ಫೆರೋಮ್ಯಾಗ್ನೆಟಿಕ್ ದೇಹಗಳ ಮೇಲೆ ಇರಿಸಲಾಗುತ್ತದೆ (ಉಕ್ಕು, ಎರಕಹೊಯ್ದ ಕಬ್ಬಿಣ).
ಎಲ್ಲಾ ವಿದ್ಯುತ್ ಯಂತ್ರಗಳು ರಿವರ್ಸಿಬಿಲಿಟಿ ಆಸ್ತಿಯನ್ನು ಹೊಂದಿವೆ, ಅಂದರೆ, ಅವುಗಳನ್ನು ವಿದ್ಯುತ್ ಶಕ್ತಿಯ ಜನರೇಟರ್ಗಳಾಗಿ ಮತ್ತು ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳಾಗಿ ಬಳಸಬಹುದು.

ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು
ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ ವಿದ್ಯುತ್ಕಾಂತೀಯ ಪ್ರಚೋದನೆಯ ಅಭಿವ್ಯಕ್ತಿಗಳಲ್ಲಿ ಒಂದಾಗಿದೆ… ಭೌತಶಾಸ್ತ್ರ ಕೋರ್ಸ್ಗಳಲ್ಲಿ ಇದನ್ನು ಈ ಕೆಳಗಿನಂತೆ ಪ್ರದರ್ಶಿಸಲಾಗುತ್ತದೆ:
ಒಂದು ತಾಮ್ರದ ಡಿಸ್ಕ್ ಅಡಿಯಲ್ಲಿ, ಅದರ ಮಧ್ಯದ ಮೂಲಕ ಹಾದುಹೋಗುವ ಲಂಬವಾದ ಅಕ್ಷದ ಸುತ್ತ ತಿರುಗಬಹುದು, ಅದೇ ಅಕ್ಷದ ಸುತ್ತ ತಿರುಗಲು ಚಾಲಿತವಾದ ಲಂಬವಾದ ಕುದುರೆಮುಖ ಮ್ಯಾಗ್ನೆಟ್ ಅನ್ನು ಇರಿಸಲಾಗುತ್ತದೆ (ಡಿಸ್ಕ್ ಮತ್ತು ಮ್ಯಾಗ್ನೆಟ್ ನಡುವಿನ ಯಾಂತ್ರಿಕ ಪರಸ್ಪರ ಕ್ರಿಯೆಯನ್ನು ಹೊರತುಪಡಿಸಲಾಗಿದೆ). ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಡಿಸ್ಕ್ ಮ್ಯಾಗ್ನೆಟ್ನಂತೆಯೇ ಅದೇ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ, ಆದರೆ ಕಡಿಮೆ ವೇಗದಲ್ಲಿ. ನೀವು ಡಿಸ್ಕ್ನಲ್ಲಿ ಯಾಂತ್ರಿಕ ಲೋಡ್ ಅನ್ನು ಹೆಚ್ಚಿಸಿದರೆ (ಉದಾಹರಣೆಗೆ, ಥ್ರಸ್ಟ್ ಬೇರಿಂಗ್ ವಿರುದ್ಧ ಆಕ್ಸಲ್ನ ಘರ್ಷಣೆಯನ್ನು ಹೆಚ್ಚಿಸುವ ಮೂಲಕ), ನಂತರ ಅದರ ತಿರುಗುವಿಕೆಯ ವೇಗವು ಕಡಿಮೆಯಾಗುತ್ತದೆ.
ಈ ವಿದ್ಯಮಾನದ ಭೌತಿಕ ಅರ್ಥವನ್ನು ವಿದ್ಯುತ್ಕಾಂತೀಯ ಪ್ರಚೋದನೆಯ ಸಿದ್ಧಾಂತದಿಂದ ಸುಲಭವಾಗಿ ವಿವರಿಸಲಾಗುತ್ತದೆ: ಮ್ಯಾಗ್ನೆಟ್ ತಿರುಗಿದಾಗ, ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ರಚಿಸಲಾಗುತ್ತದೆ, ಇದು ಡಿಸ್ಕ್ನಲ್ಲಿ ಎಡ್ಡಿ ಪ್ರವಾಹಗಳನ್ನು ಪ್ರೇರೇಪಿಸುತ್ತದೆ, ನಂತರದ ಪ್ರಮಾಣವು ಅವಲಂಬಿಸಿರುತ್ತದೆ, ಇತರ ವಿಷಯಗಳು ಸಮಾನವಾಗಿರುತ್ತದೆ. ಕ್ಷೇತ್ರ ಮತ್ತು ಡಿಸ್ಕ್ನ ಸಾಪೇಕ್ಷ ವೇಗ.
ಲೆನ್ಜ್ ಕಾನೂನಿನ ಪ್ರಕಾರ, ಡಿಸ್ಕ್ ಕ್ಷೇತ್ರದ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗಬೇಕು. ಘರ್ಷಣೆಯ ಅನುಪಸ್ಥಿತಿಯಲ್ಲಿ, ಡಿಸ್ಕ್ ಮ್ಯಾಗ್ನೆಟ್ನ ವೇಗಕ್ಕೆ ಸಮಾನವಾದ ಕೋನೀಯ ವೇಗವನ್ನು ಪಡೆದುಕೊಳ್ಳಬೇಕು, ಅದರ ನಂತರ ಪ್ರೇರಿತ ಇಎಮ್ಎಫ್ ಕಣ್ಮರೆಯಾಗುತ್ತದೆ. ನಿಜ ಜೀವನದಲ್ಲಿ, ಘರ್ಷಣೆಯು ಅನಿವಾರ್ಯವಾಗಿ ಇರುತ್ತದೆ ಮತ್ತು ಡಿಸ್ಕ್ ನಿಧಾನವಾಗುತ್ತದೆ.ಅದರ ಪ್ರಮಾಣವು ಡಿಸ್ಕ್ ಅನುಭವಿಸಿದ ಯಾಂತ್ರಿಕ ಬ್ರೇಕಿಂಗ್ ಕ್ಷಣವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ.
ಡಿಸ್ಕ್ (ರೋಟರ್) ತಿರುಗುವಿಕೆಯ ವೇಗ ಮತ್ತು ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ತಿರುಗುವಿಕೆಯ ವೇಗದ ನಡುವಿನ ವ್ಯತ್ಯಾಸವು ಮೋಟಾರ್ಗಳ ಹೆಸರಿನಲ್ಲಿ ಪ್ರತಿಫಲಿಸುತ್ತದೆ.
ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳ ಕಾರ್ಯಾಚರಣೆಯ ತತ್ವ:
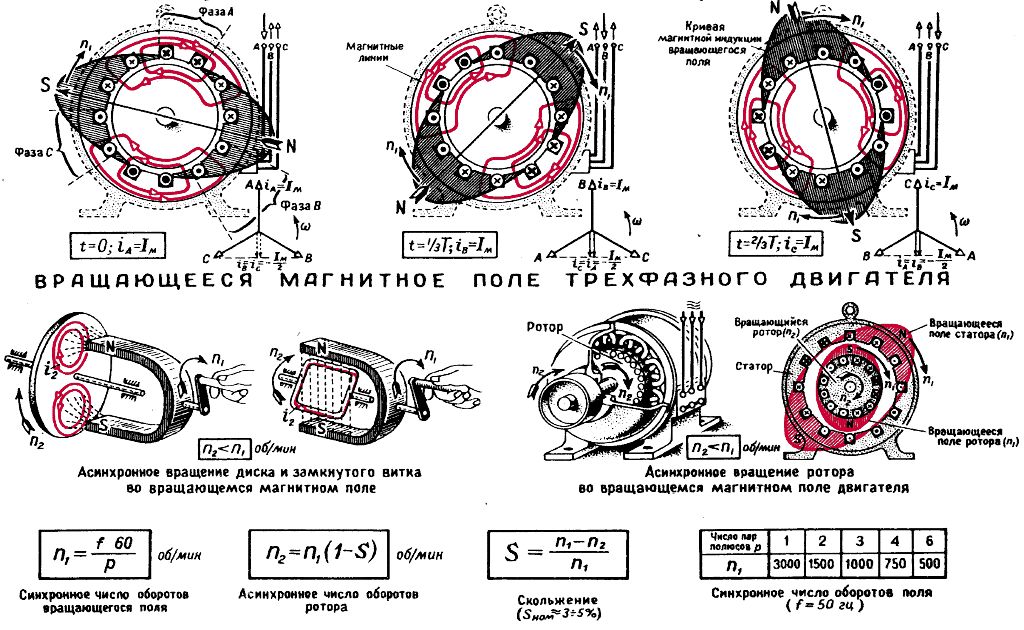
ತಾಂತ್ರಿಕ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳಲ್ಲಿ (ಹೆಚ್ಚಾಗಿ ಮೂರು-ಹಂತ) ತಿರುಗುವ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ರಚಿಸಲಾಗಿದೆ ಪಾಲಿಫೇಸ್ ಕರೆಂಟ್ಸ್ಥಾಯಿ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಸುತ್ತಲೂ ಹರಿಯುತ್ತದೆ. ಮೂರು-ಹಂತದ ಪ್ರವಾಹದ ಆವರ್ತನದಲ್ಲಿ ಮತ್ತು ಸ್ಟೇಟರ್ ಸುರುಳಿಗಳ ಸಂಖ್ಯೆ 3p ತಿರುಗುವ ಕ್ಷೇತ್ರವು n = f / p ಕ್ರಾಂತಿಗಳನ್ನು / ಸೆಕೆಂಡ್ ಮಾಡುತ್ತದೆ.

ತಿರುಗುವ ರೋಟರ್ ಸ್ಟೇಟರ್ ಕುಳಿಯಲ್ಲಿ ಇದೆ. ತಿರುಗುವ ಕಾರ್ಯವಿಧಾನವನ್ನು ಅದರ ಶಾಫ್ಟ್ಗೆ ಸಂಪರ್ಕಿಸಬಹುದು ಸರಳವಾದ "ಅಳಿಲು ಕೋಶ" ಮೋಟಾರ್ಗಳಲ್ಲಿ, ರೋಟರ್ ಉಕ್ಕಿನ ಸಿಲಿಂಡರಾಕಾರದ ದೇಹದ ಚಡಿಗಳಲ್ಲಿ ಇರಿಸಲಾದ ಉದ್ದದ ಲೋಹದ ರಾಡ್ಗಳ ವ್ಯವಸ್ಥೆಯನ್ನು ಹೊಂದಿರುತ್ತದೆ. ತಂತಿಗಳು ಎರಡು ಉಂಗುರಗಳಿಂದ ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಆಗಿವೆ. ಟಾರ್ಕ್ ಅನ್ನು ಹೆಚ್ಚಿಸಲು, ರೋಟರ್ನ ತ್ರಿಜ್ಯವು ಸಾಕಷ್ಟು ದೊಡ್ಡದಾಗಿದೆ.
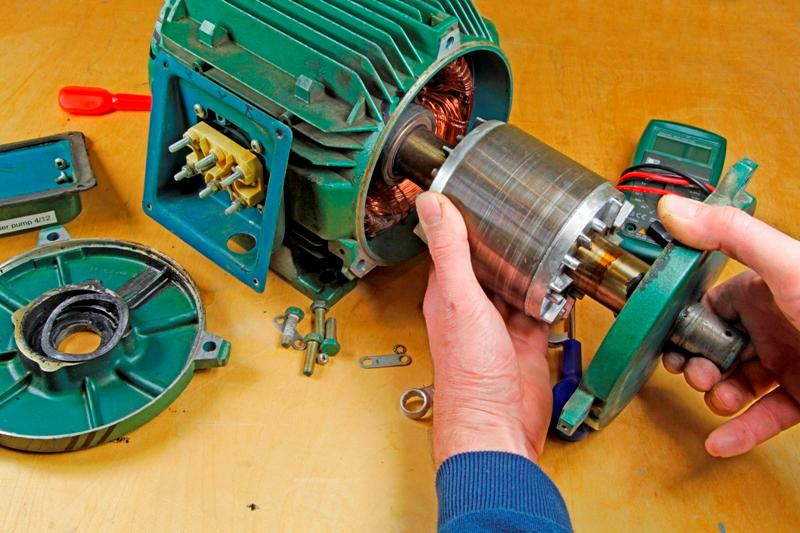
ಇತರ ಮೋಟಾರು ವಿನ್ಯಾಸಗಳಲ್ಲಿ (ಸಾಮಾನ್ಯವಾಗಿ ಹೆಚ್ಚಿನ ಶಕ್ತಿಯ ಮೋಟಾರ್ಗಳು), ರೋಟರ್ ತಂತಿಗಳು ತೆರೆದ ಮೂರು-ಹಂತದ ವಿಂಡಿಂಗ್ ಅನ್ನು ರೂಪಿಸುತ್ತವೆ. ಸುರುಳಿಗಳ ತುದಿಗಳು ರೋಟರ್ನಲ್ಲಿಯೇ ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಆಗಿರುತ್ತವೆ ಮತ್ತು ರೋಟರ್ ಶಾಫ್ಟ್ನಲ್ಲಿ ಜೋಡಿಸಲಾದ ಮೂರು ಸ್ಲಿಪ್ ಉಂಗುರಗಳಿಗೆ ಲೀಡ್ಗಳನ್ನು ತರಲಾಗುತ್ತದೆ ಮತ್ತು ಅದರಿಂದ ಪ್ರತ್ಯೇಕಿಸಲಾಗುತ್ತದೆ.
ಸ್ಲೈಡಿಂಗ್ ಸಂಪರ್ಕಗಳನ್ನು (ಕುಂಚಗಳು) ಬಳಸಿಕೊಂಡು ಈ ಉಂಗುರಗಳಿಗೆ ಮೂರು-ಹಂತದ ರಿಯೊಸ್ಟಾಟ್ ಅನ್ನು ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಇದು ಮೋಟರ್ ಅನ್ನು ಚಲನೆಯಲ್ಲಿ ಪ್ರಾರಂಭಿಸಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ. ಮೋಟಾರು ತಿರುಗಿದ ನಂತರ, ರಿಯೊಸ್ಟಾಟ್ ಅನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ತೆಗೆದುಹಾಕಲಾಗುತ್ತದೆ ಮತ್ತು ರೋಟರ್ ಅಳಿಲು ಪಂಜರವಾಗುತ್ತದೆ (ನೋಡಿ - ಗಾಯದ ರೋಟರ್ನೊಂದಿಗೆ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು).

ಸ್ಟೇಟರ್ ಹೌಸಿಂಗ್ನಲ್ಲಿ ಟರ್ಮಿನಲ್ ಬೋರ್ಡ್ ಇದೆ. ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳನ್ನು ಅವರಿಗೆ ಹೊರಗೆ ತರಲಾಗುತ್ತದೆ. ಅವರನ್ನು ಸೇರಿಸಿಕೊಳ್ಳಬಹುದು ನಕ್ಷತ್ರ ಅಥವಾ ತ್ರಿಕೋನ, ಮುಖ್ಯ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಅವಲಂಬಿಸಿ: ಮೊದಲ ಪ್ರಕರಣದಲ್ಲಿ ಮುಖ್ಯ ವೋಲ್ಟೇಜ್ ಎರಡನೆಯದಕ್ಕಿಂತ 1.73 ಪಟ್ಟು ಹೆಚ್ಚಾಗಿರುತ್ತದೆ.
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ಕ್ಷೇತ್ರಕ್ಕೆ ಹೋಲಿಸಿದರೆ ರೋಟರ್ನ ಸಾಪೇಕ್ಷ ಕ್ಷೀಣತೆಯನ್ನು ನಿರೂಪಿಸುವ ಮೌಲ್ಯವನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಜಾರಿಬೀಳುತ್ತಿದೆ… ಇದು 100% ನಿಂದ (ಮೋಟಾರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವ ಕ್ಷಣದಲ್ಲಿ) ಶೂನ್ಯಕ್ಕೆ ಬದಲಾಗುತ್ತದೆ (ನಷ್ಟವಿಲ್ಲದ ರೋಟರ್ ಚಲನೆಯ ಆದರ್ಶ ಪ್ರಕರಣ).
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕಿನ ಹಿಮ್ಮುಖವನ್ನು ಮೋಟಾರ್ ಅನ್ನು ಪೂರೈಸುವ ವಿದ್ಯುತ್ ಜಾಲದ ಪ್ರತಿ ಎರಡು ರೇಖೀಯ ಕಂಡಕ್ಟರ್ಗಳ ಪರಸ್ಪರ ಸ್ವಿಚಿಂಗ್ ಮೂಲಕ ಸಾಧಿಸಲಾಗುತ್ತದೆ.

ಅಳಿಲು ಕೇಜ್ ಮೋಟಾರ್ಗಳನ್ನು ಉದ್ಯಮದಲ್ಲಿ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳ ಅನುಕೂಲಗಳು ವಿನ್ಯಾಸದ ಸರಳತೆ ಮತ್ತು ಸ್ಲೈಡಿಂಗ್ ಸಂಪರ್ಕಗಳ ಅನುಪಸ್ಥಿತಿಯಾಗಿದೆ.
ಇತ್ತೀಚಿನವರೆಗೂ, ಅಂತಹ ಮೋಟರ್ಗಳ ಮುಖ್ಯ ಅನಾನುಕೂಲವೆಂದರೆ ವೇಗ ನಿಯಂತ್ರಣದಲ್ಲಿನ ತೊಂದರೆ, ಏಕೆಂದರೆ ಇದಕ್ಕಾಗಿ ಸ್ಟೇಟರ್ ಸರ್ಕ್ಯೂಟ್ನ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಬದಲಾಯಿಸಿದರೆ, ಟಾರ್ಕ್ ತೀವ್ರವಾಗಿ ಬದಲಾಗುತ್ತದೆ, ಆದರೆ ಸರಬರಾಜು ಪ್ರವಾಹದ ಆವರ್ತನವನ್ನು ಬದಲಾಯಿಸುವುದು ತಾಂತ್ರಿಕವಾಗಿ ಕಷ್ಟಕರವಾಗಿತ್ತು. ಆಧುನಿಕ ಮೈಕ್ರೊಪ್ರೊಸೆಸರ್ ಸಾಧನಗಳನ್ನು ಮೋಟಾರ್ಗಳ ವೇಗವನ್ನು ಬದಲಿಸಲು ಪೂರೈಕೆ ಪ್ರವಾಹದ ಆವರ್ತನವನ್ನು ನಿಯಂತ್ರಿಸಲು ಈಗ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ - ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು.
ಪರ್ಯಾಯಕಗಳು
ಗಮನಾರ್ಹವಾದ ಶಕ್ತಿ ಮತ್ತು ಹೆಚ್ಚಿನ ವೋಲ್ಟೇಜ್ಗಾಗಿ ಪರ್ಯಾಯಗಳನ್ನು ನಿರ್ಮಿಸಲಾಗಿದೆ. ಅಸಮಕಾಲಿಕ ಯಂತ್ರಗಳಂತೆ, ಅವು ಎರಡು ವಿಂಡ್ಗಳನ್ನು ಹೊಂದಿರುತ್ತವೆ. ಸಾಮಾನ್ಯವಾಗಿ, ಆರ್ಮೇಚರ್ ವಿಂಡಿಂಗ್ ಸ್ಟೇಟರ್ ಹೌಸಿಂಗ್ನಲ್ಲಿದೆ. ಪ್ರಾಥಮಿಕ ಮ್ಯಾಗ್ನೆಟಿಕ್ ಫ್ಲಕ್ಸ್ ಅನ್ನು ರಚಿಸುವ ಇಂಡಕ್ಟರ್ಗಳು ರೋಟರ್ನಲ್ಲಿ ಜೋಡಿಸಲ್ಪಟ್ಟಿರುತ್ತವೆ ಮತ್ತು ರೋಟರ್ ಶಾಫ್ಟ್ನಲ್ಲಿ ಅಳವಡಿಸಲಾದ ಒಂದು ಸಣ್ಣ DC ಜನರೇಟರ್ ಅನ್ನು ಎಕ್ಸೈಟರ್ನಿಂದ ಚಾಲಿತಗೊಳಿಸಲಾಗುತ್ತದೆ. ಉನ್ನತ-ಶಕ್ತಿಯ ಯಂತ್ರಗಳಲ್ಲಿ, ಪ್ರಚೋದನೆಯನ್ನು ಕೆಲವೊಮ್ಮೆ ಸರಿಪಡಿಸಿದ ಪರ್ಯಾಯ ವೋಲ್ಟೇಜ್ನಿಂದ ರಚಿಸಲಾಗುತ್ತದೆ.
ಆರ್ಮೇಚರ್ ವಿಂಡಿಂಗ್ನ ನಿಶ್ಚಲತೆಯಿಂದಾಗಿ, ಹೆಚ್ಚಿನ ಶಕ್ತಿಗಳಲ್ಲಿ ಸ್ಲೈಡಿಂಗ್ ಸಂಪರ್ಕಗಳ ಬಳಕೆಗೆ ಸಂಬಂಧಿಸಿದ ತಾಂತ್ರಿಕ ತೊಂದರೆಗಳು ಕಣ್ಮರೆಯಾಗುತ್ತವೆ.
ಕೆಳಗಿನ ಚಿತ್ರವು ಏಕ-ಹಂತದ ಜನರೇಟರ್ನ ಸ್ಕೀಮ್ಯಾಟಿಕ್ ಅನ್ನು ತೋರಿಸುತ್ತದೆ. ಇದರ ರೋಟರ್ ಎಂಟು ಧ್ರುವಗಳನ್ನು ಹೊಂದಿದೆ. ಇವುಗಳ ಮೇಲೆ ಗಾಯದ ಸುರುಳಿಗಳು (ಚಿತ್ರದಲ್ಲಿ ತೋರಿಸಲಾಗಿಲ್ಲ) ರೋಟರ್ ಶಾಫ್ಟ್ನಲ್ಲಿ ಅಳವಡಿಸಲಾದ ಸ್ಲಿಪ್ ಉಂಗುರಗಳಿಗೆ ಅನ್ವಯಿಸಲಾದ ನೇರ ಪ್ರವಾಹದಿಂದ ಬಾಹ್ಯ ಮೂಲದಿಂದ ನೀಡಲಾಗುತ್ತದೆ. ಪೋಲ್ ಸುರುಳಿಗಳು ಸ್ಟೇಟರ್ ಅನ್ನು ಎದುರಿಸುತ್ತಿರುವ ಧ್ರುವಗಳ ಚಿಹ್ನೆಗಳು ಪರ್ಯಾಯವಾಗಿ ಗಾಯಗೊಳ್ಳುತ್ತವೆ. ಧ್ರುವಗಳ ಸಂಖ್ಯೆಯು ಸಮವಾಗಿರಬೇಕು.
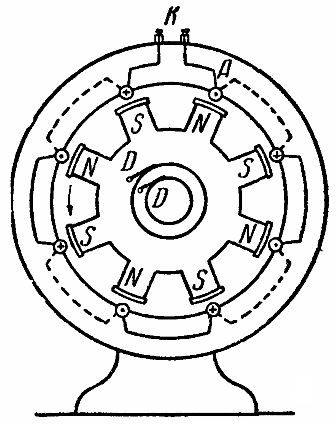
ಆರ್ಮೇಚರ್ ವಿಂಡಿಂಗ್ ಸ್ಟೇಟರ್ ಹೌಸಿಂಗ್ನಲ್ಲಿದೆ. ಅದರ ದೀರ್ಘ ಕೆಲಸ «ಸಕ್ರಿಯ» ತಂತಿಗಳು, ರೇಖಾಚಿತ್ರದ ಸಮತಲಕ್ಕೆ ಲಂಬವಾಗಿ, ವಲಯಗಳೊಂದಿಗೆ ಚಿತ್ರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ, ರೋಟರ್ ತಿರುಗಿದಾಗ ಅವುಗಳನ್ನು ಮ್ಯಾಗ್ನೆಟಿಕ್ ಇಂಡಕ್ಷನ್ ರೇಖೆಗಳಿಂದ ದಾಟಲಾಗುತ್ತದೆ.
ವಲಯಗಳು ಪ್ರೇರಿತ ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರಗಳ ದಿಕ್ಕುಗಳ ತ್ವರಿತ ವಿತರಣೆಯನ್ನು ತೋರಿಸುತ್ತವೆ. ಸ್ಟೇಟರ್ನ ಮುಂಭಾಗದ ಭಾಗದಲ್ಲಿ ಚಲಿಸುವ ಸಂಪರ್ಕಿಸುವ ತಂತಿಗಳನ್ನು ಘನ ರೇಖೆಗಳೊಂದಿಗೆ ಮತ್ತು ಹಿಂಭಾಗದಲ್ಲಿ ಡ್ಯಾಶ್ ಮಾಡಿದ ರೇಖೆಗಳೊಂದಿಗೆ ತೋರಿಸಲಾಗಿದೆ. ಬಾಹ್ಯ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ಗೆ ಸಂಪರ್ಕಿಸಲು ಕೆ ಹಿಡಿಕಟ್ಟುಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ರೋಟರ್ನ ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕನ್ನು ಬಾಣದಿಂದ ಸೂಚಿಸಲಾಗುತ್ತದೆ.
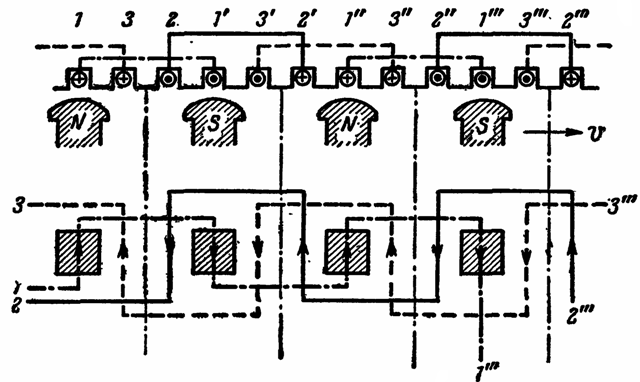
ಹಿಡಿಕಟ್ಟುಗಳು K ನಡುವೆ ಹಾದುಹೋಗುವ ತ್ರಿಜ್ಯದ ಉದ್ದಕ್ಕೂ ನೀವು ಯಂತ್ರವನ್ನು ಮಾನಸಿಕವಾಗಿ ಕತ್ತರಿಸಿ ಅದನ್ನು ಸಮತಲವಾಗಿ ಪರಿವರ್ತಿಸಿದರೆ, ನಂತರ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಮತ್ತು ರೋಟರ್ ಧ್ರುವಗಳ (ಬದಿ ಮತ್ತು ಯೋಜನೆ) ಸಾಪೇಕ್ಷ ಸ್ಥಾನವನ್ನು ಸ್ಕೀಮ್ಯಾಟಿಕ್ ಡ್ರಾಯಿಂಗ್ನೊಂದಿಗೆ ಚಿತ್ರಿಸಲಾಗುತ್ತದೆ:
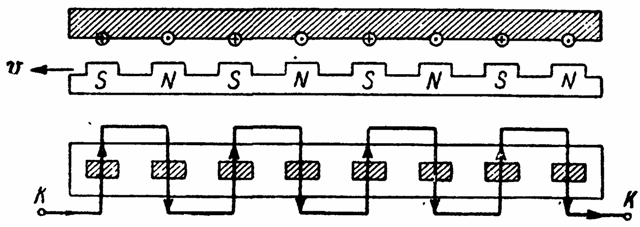
ಆಕೃತಿಯನ್ನು ಪರಿಗಣಿಸಿ, ಎಲ್ಲಾ ಸಕ್ರಿಯ ತಂತಿಗಳು (ಇಂಡಕ್ಟರ್ನ ಧ್ರುವಗಳ ಮೂಲಕ ಹಾದುಹೋಗುವ) ಸರಣಿಯಲ್ಲಿ ಪರಸ್ಪರ ಸಂಪರ್ಕಗೊಂಡಿವೆ ಮತ್ತು ಅವುಗಳಲ್ಲಿ ಪ್ರೇರಿತವಾದ EMF ಅನ್ನು ಒಟ್ಟುಗೂಡಿಸಲಾಗುತ್ತದೆ ಎಂದು ನಾವು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳುತ್ತೇವೆ. ಎಲ್ಲಾ EMF ಗಳ ಹಂತಗಳು ನಿಸ್ಸಂಶಯವಾಗಿ ಒಂದೇ ಆಗಿರುತ್ತವೆ.ರೋಟರ್ನ ಒಂದು ಸಂಪೂರ್ಣ ತಿರುಗುವಿಕೆಯ ಸಮಯದಲ್ಲಿ, ಪ್ರತಿಯೊಂದು ತಂತಿಗಳಲ್ಲಿ (ಮತ್ತು ಆದ್ದರಿಂದ ಹೊರಗಿನ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ) ಪ್ರಸ್ತುತ ಬದಲಾವಣೆಯ ನಾಲ್ಕು ಸಂಪೂರ್ಣ ಅವಧಿಗಳನ್ನು ಪಡೆಯಲಾಗುತ್ತದೆ.
ವಿದ್ಯುತ್ ಯಂತ್ರವು p ಜೋಡಿ ಧ್ರುವಗಳನ್ನು ಹೊಂದಿದ್ದರೆ ಮತ್ತು ರೋಟರ್ ಪ್ರತಿ ಸೆಕೆಂಡಿಗೆ n ಕ್ರಾಂತಿಗಳನ್ನು ಮಾಡುವಂತೆ ತಿರುಗಿದರೆ, ನಂತರ ಯಂತ್ರವು ಸ್ವೀಕರಿಸಿದ ಪರ್ಯಾಯ ಪ್ರವಾಹದ ಆವರ್ತನವು f = pn hz ಆಗಿದೆ.
ನೆಟ್ವರ್ಕ್ನಲ್ಲಿನ ಇಎಮ್ಎಫ್ನ ಆವರ್ತನವು ಸ್ಥಿರವಾಗಿರಬೇಕು, ರೋಟರ್ಗಳ ತಿರುಗುವಿಕೆಯ ವೇಗವು ಸ್ಥಿರವಾಗಿರಬೇಕು. ತಾಂತ್ರಿಕ ಆವರ್ತನದ (50 Hz) EMF ಅನ್ನು ಪಡೆಯಲು, ರೋಟರ್ ಧ್ರುವಗಳ ಸಂಖ್ಯೆಯು ಸಾಕಷ್ಟು ದೊಡ್ಡದಾಗಿದ್ದರೆ ತುಲನಾತ್ಮಕವಾಗಿ ನಿಧಾನ ತಿರುಗುವಿಕೆಯನ್ನು ಬಳಸಬಹುದು.
ಮೂರು-ಹಂತದ ಪ್ರವಾಹವನ್ನು ಪಡೆಯಲು, ಮೂರು ಪ್ರತ್ಯೇಕ ವಿಂಡ್ಗಳನ್ನು ಸ್ಟೇಟರ್ ದೇಹದಲ್ಲಿ ಇರಿಸಲಾಗುತ್ತದೆ. ಇಂಡಕ್ಟರ್ಗಳ ಪಕ್ಕದ (ವಿರುದ್ಧ) ಧ್ರುವಗಳ ನಡುವಿನ ಆರ್ಕ್ ಅಂತರದ ಮೂರನೇ ಒಂದು ಭಾಗದಿಂದ ಅವುಗಳಲ್ಲಿ ಪ್ರತಿಯೊಂದೂ ಇತರ ಎರಡಕ್ಕೆ ಹೋಲಿಸಿದರೆ ಸರಿದೂಗಿಸಲಾಗುತ್ತದೆ.
ಇಂಡಕ್ಟರುಗಳು ತಿರುಗಿದಾಗ, 120 ° ಮೂಲಕ ಹಂತದಲ್ಲಿ (ಸಮಯದಲ್ಲಿ) ವರ್ಗಾಯಿಸಲಾದ ಸುರುಳಿಗಳಲ್ಲಿ EMF ಗಳನ್ನು ಪ್ರೇರೇಪಿಸುತ್ತದೆ ಎಂದು ಪರಿಶೀಲಿಸುವುದು ಸುಲಭ. ಸುರುಳಿಗಳ ತುದಿಗಳನ್ನು ಯಂತ್ರದಿಂದ ತೆಗೆದುಹಾಕಲಾಗುತ್ತದೆ ಮತ್ತು ನಕ್ಷತ್ರ ಅಥವಾ ಡೆಲ್ಟಾದಲ್ಲಿ ಸಂಪರ್ಕಿಸಬಹುದು.
ಜನರೇಟರ್ನಲ್ಲಿ, ಕ್ಷೇತ್ರ ಮತ್ತು ಕಂಡಕ್ಟರ್ನ ಸಾಪೇಕ್ಷ ವೇಗವನ್ನು ರೋಟರ್ನ ವ್ಯಾಸ, ಸೆಕೆಂಡಿಗೆ ರೋಟರ್ನ ಕ್ರಾಂತಿಗಳ ಸಂಖ್ಯೆ ಮತ್ತು ಪೋಲ್ ಜೋಡಿಗಳ ಸಂಖ್ಯೆಯಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ.

ಜನರೇಟರ್ ಅನ್ನು ನೀರಿನ ಪ್ರವಾಹದಿಂದ (ಹೈಡ್ರೋಜನರೇಟರ್) ನಡೆಸಿದರೆ, ಅದನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ನಿಧಾನ ಕ್ರಾಂತಿಗಳೊಂದಿಗೆ ತಯಾರಿಸಲಾಗುತ್ತದೆ. ಅಪೇಕ್ಷಿತ ಪ್ರಸ್ತುತ ಆವರ್ತನವನ್ನು ಪಡೆಯಲು, ಧ್ರುವಗಳ ಸಂಖ್ಯೆಯನ್ನು ಹೆಚ್ಚಿಸುವ ಅವಶ್ಯಕತೆಯಿದೆ, ಇದು ರೋಟರ್ನ ವ್ಯಾಸದಲ್ಲಿ ಹೆಚ್ಚಳದ ಅಗತ್ಯವಿರುತ್ತದೆ.
ಹಲವಾರು ತಾಂತ್ರಿಕ ಕಾರಣಗಳಿಗಾಗಿ ಶಕ್ತಿಯುತ ಹೈಡ್ರೋಜನ್ ಜನರೇಟರ್ಗಳು ಅವು ಸಾಮಾನ್ಯವಾಗಿ ಲಂಬವಾದ ಶಾಫ್ಟ್ ಅನ್ನು ಹೊಂದಿರುತ್ತವೆ ಮತ್ತು ಹೈಡ್ರಾಲಿಕ್ ಟರ್ಬೈನ್ ಮೇಲೆ ನೆಲೆಗೊಂಡಿವೆ, ಅದು ಅವುಗಳನ್ನು ತಿರುಗಿಸಲು ಕಾರಣವಾಗುತ್ತದೆ.

ಸ್ಟೀಮ್ ಟರ್ಬೈನ್ ಚಾಲಿತ ಜನರೇಟರ್ಗಳು - ಟರ್ಬೈನ್ ಜನರೇಟರ್ಗಳು ಸಾಮಾನ್ಯವಾಗಿ ಹೆಚ್ಚಿನ ವೇಗವನ್ನು ಹೊಂದಿರುತ್ತವೆ. ಯಾಂತ್ರಿಕ ಬಲಗಳನ್ನು ಕಡಿಮೆ ಮಾಡಲು, ಅವುಗಳು ಸಣ್ಣ ವ್ಯಾಸವನ್ನು ಹೊಂದಿರುತ್ತವೆ ಮತ್ತು ಅದಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಕಡಿಮೆ ಸಂಖ್ಯೆಯ ಧ್ರುವಗಳನ್ನು ಹೊಂದಿರುತ್ತವೆ.ಹಲವಾರು ತಾಂತ್ರಿಕ ಪರಿಗಣನೆಗಳಿಗೆ ಸಮತಲವಾದ ಶಾಫ್ಟ್ನೊಂದಿಗೆ ಟರ್ಬೈನ್ ಜನರೇಟರ್ಗಳ ಉತ್ಪಾದನೆಯ ಅಗತ್ಯವಿರುತ್ತದೆ.
ಜನರೇಟರ್ ಅನ್ನು ಆಂತರಿಕ ದಹನಕಾರಿ ಎಂಜಿನ್ನಿಂದ ನಡೆಸಿದರೆ, ಅದನ್ನು ಡೀಸೆಲ್ ಜನರೇಟರ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ, ಏಕೆಂದರೆ ಡೀಸೆಲ್ ಎಂಜಿನ್ಗಳನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಅಗ್ಗದ ಇಂಧನವನ್ನು ಸೇವಿಸುವ ಎಂಜಿನ್ಗಳಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.

ಜನರೇಟರ್ ರಿವರ್ಸಿಬಿಲಿಟಿ, ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್ಸ್
ಬಾಹ್ಯ ಮೂಲದಿಂದ ಜನರೇಟರ್ನ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ಗೆ ಪರ್ಯಾಯ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಅನ್ವಯಿಸಿದರೆ, ಸ್ಟೇಟರ್ನಲ್ಲಿ ಉತ್ಪತ್ತಿಯಾಗುವ ಪ್ರವಾಹದ ಕಾಂತೀಯ ಕ್ಷೇತ್ರದೊಂದಿಗೆ ಇಂಡಕ್ಟರ್ನ ಧ್ರುವಗಳ ಪರಸ್ಪರ ಕ್ರಿಯೆ ಇರುತ್ತದೆ ಮತ್ತು ಅದೇ ದಿಕ್ಕಿನಿಂದ ಟಾರ್ಕ್ಗಳು ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ. ಎಲ್ಲಾ ಧ್ರುವಗಳ ಮೇಲೆ.
ರೋಟರ್ ಅಂತಹ ವೇಗದಲ್ಲಿ ತಿರುಗಿದರೆ, ಪರ್ಯಾಯ ಪ್ರವಾಹದ ಅರ್ಧ ಅವಧಿಯ ನಂತರ ಸ್ವಲ್ಪ ಸಮಯದ ನಂತರ, ಇಂಡಕ್ಟರ್ನ ಮುಂದಿನ ಧ್ರುವವು (ಮೊದಲ ಧ್ರುವಕ್ಕೆ ವಿರುದ್ಧವಾಗಿ) ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನ ಪರಿಗಣಿತ ತಂತಿಯ ಅಡಿಯಲ್ಲಿ ಹೊಂದಿಕೊಳ್ಳುತ್ತದೆ, ನಂತರ ಅದರ ಚಿಹ್ನೆ ಅದರ ಮತ್ತು ಪ್ರವಾಹದ ನಡುವಿನ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಬಲವು ಅದರ ದಿಕ್ಕನ್ನು ಬದಲಾಯಿಸಿದೆ, ಅದು ಒಂದೇ ಆಗಿರುತ್ತದೆ.
ಈ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ, ರೋಟರ್, ಟಾರ್ಕ್ನ ನಿರಂತರ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ, ಚಲಿಸಲು ಮುಂದುವರಿಯುತ್ತದೆ ಮತ್ತು ಯಾವುದೇ ಕಾರ್ಯವಿಧಾನವನ್ನು ಚಾಲನೆ ಮಾಡಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ. ರೋಟರ್ನ ಚಲನೆಗೆ ಪ್ರತಿರೋಧವನ್ನು ಮೀರಿಸುವುದು ನೆಟ್ವರ್ಕ್ನಿಂದ ಸೇವಿಸುವ ಶಕ್ತಿಯಿಂದಾಗಿ ಸಂಭವಿಸುತ್ತದೆ, ಮತ್ತು ಜನರೇಟರ್ ವಿದ್ಯುತ್ ಮೋಟರ್ ಆಗುತ್ತದೆ.

ಆದಾಗ್ಯೂ, ನಿರಂತರ ಚಲನೆಯು ಕಟ್ಟುನಿಟ್ಟಾಗಿ ವ್ಯಾಖ್ಯಾನಿಸಲಾದ ತಿರುಗುವಿಕೆಯ ವೇಗದಲ್ಲಿ ಮಾತ್ರ ಸಾಧ್ಯ ಎಂದು ಗಮನಿಸಬೇಕು, ಏಕೆಂದರೆ ಅದರಿಂದ ವಿಚಲನದ ಸಂದರ್ಭದಲ್ಲಿ ವೇಗವರ್ಧಕ ಕ್ಷಣವು ರೋಟರ್ನ ಪ್ರತಿಯೊಂದು ಧ್ರುವಗಳ ಮೇಲೆ ಭಾಗಶಃ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಇದು ಎರಡು ವಾಹಕಗಳ ನಡುವೆ ಚಲಿಸುತ್ತದೆ. ಸ್ಟೇಟರ್, ಸಮಯದ ಭಾಗ - ನಿಲ್ಲಿಸುವುದು .
ಹೀಗಾಗಿ, ಮೋಟಾರಿನ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಕಟ್ಟುನಿಟ್ಟಾಗಿ ನಿರ್ಧರಿಸಬೇಕು, - ಧ್ರುವವನ್ನು ಮುಂದಿನದರಿಂದ ಬದಲಾಯಿಸುವ ಸಮಯವು ಪ್ರವಾಹದ ಅರ್ಧ-ಅವಧಿಯೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗಬೇಕು, ಅದಕ್ಕಾಗಿಯೇ ಅಂತಹ ಮೋಟಾರ್ಗಳನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಸಿಂಕ್ರೊನಸ್ ಆಗಿ.
ಸ್ಥಾಯಿ ರೋಟರ್ನೊಂದಿಗೆ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ಗೆ ಪರ್ಯಾಯ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಅನ್ವಯಿಸಿದರೆ, ಪ್ರಸ್ತುತದ ಮೊದಲ ಅರ್ಧ-ಚಕ್ರದಲ್ಲಿ ರೋಟರ್ನ ಎಲ್ಲಾ ಧ್ರುವಗಳು ಒಂದೇ ಚಿಹ್ನೆಯ ಟಾರ್ಕ್ಗಳ ಕ್ರಿಯೆಯನ್ನು ಅನುಭವಿಸಿದರೂ, ಇನ್ನೂ, ಜಡತ್ವದಿಂದಾಗಿ, ರೋಟರ್ ಸರಿಸಲು ಸಮಯ ಹೊಂದಿಲ್ಲ. ಮುಂದಿನ ಅರ್ಧ-ಚಕ್ರದಲ್ಲಿ, ಎಲ್ಲಾ ರೋಟರ್ ಧ್ರುವಗಳಿಗೆ ಟಾರ್ಕ್ಗಳ ಚಿಹ್ನೆಯು ವಿರುದ್ಧವಾಗಿ ಬದಲಾಗುತ್ತದೆ.
ಪರಿಣಾಮವಾಗಿ, ರೋಟರ್ ಕಂಪಿಸುತ್ತದೆ ಆದರೆ ತಿರುಗಲು ಸಾಧ್ಯವಾಗುವುದಿಲ್ಲ. ಆದ್ದರಿಂದ, ಸಿಂಕ್ರೊನಸ್ ಮೋಟರ್ ಅನ್ನು ಮೊದಲು ಗಾಯಗೊಳಿಸಬೇಕು, ಅಂದರೆ, ಸಾಮಾನ್ಯ ಸಂಖ್ಯೆಯ ಕ್ರಾಂತಿಗಳಿಗೆ ತರಬೇಕು ಮತ್ತು ನಂತರ ಮಾತ್ರ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನಲ್ಲಿನ ಪ್ರವಾಹವನ್ನು ಆನ್ ಮಾಡಬೇಕು.
ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್ಗಳ ಅಭಿವೃದ್ಧಿಯನ್ನು ಯಾಂತ್ರಿಕ ವಿಧಾನಗಳಿಂದ (ಕಡಿಮೆ ಶಕ್ತಿಗಳಲ್ಲಿ) ಮತ್ತು ವಿಶೇಷ ವಿದ್ಯುತ್ ಸಾಧನಗಳಿಂದ (ಹೆಚ್ಚಿನ ಶಕ್ತಿಗಳಲ್ಲಿ) ನಡೆಸಲಾಗುತ್ತದೆ.
ಸಣ್ಣ ಲೋಡ್ ಬದಲಾವಣೆಗಳಿಗೆ, ಹೊಸ ಲೋಡ್ಗೆ ಹೊಂದಿಕೊಳ್ಳಲು ಮೋಟಾರ್ ವೇಗವು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಬದಲಾಗುತ್ತದೆ. ಆದ್ದರಿಂದ, ಮೋಟಾರ್ ಶಾಫ್ಟ್ನಲ್ಲಿ ಲೋಡ್ ಹೆಚ್ಚಾದಂತೆ, ರೋಟರ್ ತಕ್ಷಣವೇ ನಿಧಾನಗೊಳಿಸುತ್ತದೆ. ಆದ್ದರಿಂದ, ಸ್ಟೇಟರ್ ಅಂಕುಡೊಂಕಾದ ಬದಲಾವಣೆಗಳಲ್ಲಿ ಇಂಡಕ್ಟರ್ನಿಂದ ಪ್ರೇರಿತವಾದ ಲೈನ್ ವೋಲ್ಟೇಜ್ ಮತ್ತು ವಿರುದ್ಧವಾದ ಪ್ರೇರಿತ EMF ನಡುವಿನ ಹಂತದ ಶಿಫ್ಟ್.
ಇದರ ಜೊತೆಯಲ್ಲಿ, ಆರ್ಮೇಚರ್ ಪ್ರತಿಕ್ರಿಯೆಯು ಇಂಡಕ್ಟರ್ಗಳ ಡಿಮ್ಯಾಗ್ನೆಟೈಸೇಶನ್ ಅನ್ನು ಸೃಷ್ಟಿಸುತ್ತದೆ, ಆದ್ದರಿಂದ ಸ್ಟೇಟರ್ ಪ್ರವಾಹವು ಹೆಚ್ಚಾಗುತ್ತದೆ, ಇಂಡಕ್ಟರ್ಗಳು ಹೆಚ್ಚಿದ ಟಾರ್ಕ್ ಅನ್ನು ಅನುಭವಿಸುತ್ತಾರೆ ಮತ್ತು ಮೋಟಾರ್ ಮತ್ತೆ ಸಿಂಕ್ರೊನಸ್ ಆಗಿ ತಿರುಗಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ, ಹೆಚ್ಚಿದ ಲೋಡ್ ಅನ್ನು ಮೀರಿಸುತ್ತದೆ. ಲೋಡ್ ಕಡಿತದೊಂದಿಗೆ ಇದೇ ರೀತಿಯ ಪ್ರಕ್ರಿಯೆಯು ಸಂಭವಿಸುತ್ತದೆ.
ಲೋಡ್ನಲ್ಲಿ ತೀಕ್ಷ್ಣವಾದ ಏರಿಳಿತಗಳೊಂದಿಗೆ, ಮೋಟರ್ನ ಈ ಹೊಂದಾಣಿಕೆಯು ಸಾಕಷ್ಟಿಲ್ಲದಿರಬಹುದು, ಅದರ ವೇಗವು ಗಮನಾರ್ಹವಾಗಿ ಬದಲಾಗುತ್ತದೆ, ಅದು "ಸಿಂಕ್ರೊನಿಸಂನಿಂದ ಹೊರಬರುತ್ತದೆ" ಮತ್ತು ಅಂತಿಮವಾಗಿ ನಿಲ್ಲುತ್ತದೆ, ಆದರೆ ಸ್ಟೇಟರ್ನಲ್ಲಿ ಪ್ರೇರಿತವಾದ ಇಎಮ್ಎಫ್ ಇಂಡಕ್ಷನ್ ಕಣ್ಮರೆಯಾಗುತ್ತದೆ ಮತ್ತು ಅದರಲ್ಲಿ ಪ್ರಸ್ತುತವು ಹೆಚ್ಚಾಗುತ್ತದೆ ತೀವ್ರವಾಗಿ. ಆದ್ದರಿಂದ, ಲೋಡ್ನಲ್ಲಿ ತೀಕ್ಷ್ಣವಾದ ಏರಿಳಿತಗಳನ್ನು ತಪ್ಪಿಸಬೇಕು. ಮೋಟಾರು ನಿಲ್ಲಿಸಲು, ನಿಸ್ಸಂಶಯವಾಗಿ ನೀವು ಮೊದಲು ಸ್ಟೇಟರ್ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸಬೇಕು ಮತ್ತು ನಂತರ ಚೋಕ್ಗಳನ್ನು ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸಬೇಕು; ಎಂಜಿನ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವಾಗ, ನೀವು ಕಾರ್ಯಾಚರಣೆಗಳ ಹಿಮ್ಮುಖ ಕ್ರಮಕ್ಕೆ ಬದ್ಧರಾಗಿರಬೇಕು.
ಸ್ಥಿರವಾದ ವೇಗದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಕಾರ್ಯವಿಧಾನಗಳನ್ನು ಚಾಲನೆ ಮಾಡಲು ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್ಗಳನ್ನು ಹೆಚ್ಚಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್ಗಳ ಅನುಕೂಲಗಳು ಮತ್ತು ಅನಾನುಕೂಲಗಳು ಮತ್ತು ಅವುಗಳನ್ನು ಪ್ರಾರಂಭಿಸುವ ವಿಧಾನಗಳು ಇಲ್ಲಿವೆ: ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್ಗಳು ಮತ್ತು ಅವುಗಳ ಅನ್ವಯಗಳು
ಶೈಕ್ಷಣಿಕ ಚಲನಚಿತ್ರ ಪಟ್ಟಿ - "ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್ಸ್", 1966 ರಲ್ಲಿ ಶೈಕ್ಷಣಿಕ-ದೃಶ್ಯ ಸಾಧನಗಳ ಕಾರ್ಖಾನೆಯಿಂದ ರಚಿಸಲಾಗಿದೆ. ನೀವು ಅದನ್ನು ಇಲ್ಲಿ ವೀಕ್ಷಿಸಬಹುದು: ಫಿಲ್ಮ್ಸ್ಟ್ರಿಪ್ "ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್"
