ಪ್ರಸ್ತುತದ ಕಾರ್ಯವಾಗಿ ಮೋಟಾರ್ ನಿಯಂತ್ರಣ
 ಸ್ಟೇಟರ್ ಪ್ರವಾಹದ ಶಕ್ತಿಯನ್ನು ಅವಲಂಬಿಸಿ ಮೋಟಾರ್ ನಿಯಂತ್ರಣವನ್ನು ಮಾಡಬಹುದು. ಗಾಯದ-ರೋಟರ್ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಪ್ರವಾಹದ ಕಾರ್ಯವಾಗಿ ಆರಂಭಿಕ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 1 ಎ.
ಸ್ಟೇಟರ್ ಪ್ರವಾಹದ ಶಕ್ತಿಯನ್ನು ಅವಲಂಬಿಸಿ ಮೋಟಾರ್ ನಿಯಂತ್ರಣವನ್ನು ಮಾಡಬಹುದು. ಗಾಯದ-ರೋಟರ್ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಪ್ರವಾಹದ ಕಾರ್ಯವಾಗಿ ಆರಂಭಿಕ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 1 ಎ.
ಪ್ರಾರಂಭದ ಕ್ಷಣದಲ್ಲಿ, ಪ್ರಸ್ತುತವು I1 ಮೌಲ್ಯವನ್ನು ತಲುಪುತ್ತದೆ, ಮತ್ತು ಒಂದು ನಿರ್ದಿಷ್ಟ ಸಮಯದ ಮಧ್ಯಂತರದ ನಂತರ ಅದು ಮೌಲ್ಯ I2 (fig. b) ಗೆ ಕಡಿಮೆಯಾಗುತ್ತದೆ. ಈ ಹಂತದಲ್ಲಿ, ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ ಆರಂಭಿಕ ಪ್ರತಿರೋಧದ ಭಾಗವು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಆಗಿರುತ್ತದೆ, ಪ್ರಸ್ತುತವು I1 ಮೌಲ್ಯಕ್ಕೆ ಏರುತ್ತದೆ, ನಂತರ ಮತ್ತೆ I2 ಮೌಲ್ಯಕ್ಕೆ ಇಳಿಯುತ್ತದೆ, ಇದು ಆರಂಭಿಕ ಪ್ರತಿರೋಧದ ಇನ್ನೊಂದು ಭಾಗವನ್ನು ಚಿಕ್ಕದಾಗಿಸುತ್ತದೆ. ಆರಂಭಿಕ ಪ್ರತಿರೋಧದ ಎಲ್ಲಾ ಹಂತಗಳು ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಆಗುವವರೆಗೆ ಈ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಪುನರಾವರ್ತಿಸಲಾಗುತ್ತದೆ. ಈ ಉದ್ದೇಶಗಳಿಗಾಗಿ, ಓವರ್ಕರೆಂಟ್ ರಿಲೇ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ, ಅದರ ವಿಂಡ್ಗಳನ್ನು ಮೋಟರ್ನ ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಸೇರಿಸಲಾಗಿದೆ.
ನೀವು ಕ್ಲಿಕ್ ಮಾಡಿದಾಗ ಪ್ರಾರಂಭ ಬಟನ್ SB1 (ಅಂಜೂರವನ್ನು ನೋಡಿ. ಎ) ಸಂಪರ್ಕಕಾರ ಕೆಎಂ ಅನ್ನು ಸಕ್ರಿಯಗೊಳಿಸಲಾಗಿದೆ, ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಸಾಮಾನ್ಯ ಆರಂಭಿಕ ಪ್ರತಿರೋಧದಲ್ಲಿ ಮೋಟರ್ ಅನ್ನು ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಿಸುವ ಮುಖ್ಯ ಸಂಪರ್ಕಗಳು. ಈ ಸಂದರ್ಭದಲ್ಲಿ, KA ರಿಲೇಯ ಸುರುಳಿಯು ಶಕ್ತಿಯನ್ನು ಪಡೆಯುತ್ತದೆ, ಅದರ ಆರಂಭಿಕ ಸಂಪರ್ಕಗಳು ವೇಗವರ್ಧಕ ಕಾಯಿಲ್ K1 ರ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿವೆ.KA ರಿಲೇ ಅನ್ನು ಹೊಂದಿಸಲಾಗಿದೆ ಆದ್ದರಿಂದ ಪ್ರತಿಕ್ರಿಯೆ ಸಮಯವು K1 ಕಾಂಟಕ್ಟರ್ಗಿಂತ ಕಡಿಮೆಯಿರುತ್ತದೆ. ಹೆಚ್ಚುವರಿಯಾಗಿ, ಗರಿಷ್ಠ ಅನುಮತಿಸುವ ಮೌಲ್ಯದಲ್ಲಿ ಅದರ ಬ್ರೇಕಿಂಗ್ ಸಂಪರ್ಕಗಳು ಆರಂಭಿಕ ಪ್ರಸ್ತುತ ತೆರೆಯಿರಿ, ಮತ್ತು ಪ್ರಸ್ತುತವು ಅದರ ಸ್ವಿಚಿಂಗ್ ಮೌಲ್ಯಕ್ಕೆ ಕಡಿಮೆಯಾದಾಗ, ಅವು ಮತ್ತೆ ಮುಚ್ಚಲ್ಪಡುತ್ತವೆ, ಇದರಿಂದಾಗಿ ಆರಂಭಿಕ ಪ್ರತಿರೋಧ ಹಂತದ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ನ ಕ್ಷಣದಲ್ಲಿ ರಿಲೇ KA ಯ ಸಂಪರ್ಕಗಳ ಮೂಲಕ ಸುರುಳಿ K1 ಅನ್ನು ಆನ್ ಮಾಡಲಾಗುತ್ತದೆ.
ವೇಗೋತ್ಕರ್ಷದ ಸಂಪರ್ಕಕಾರ ಕೆ 1 ಅನ್ನು ಶಕ್ತಿಯುತಗೊಳಿಸುವ ಮೊದಲು ರಿಲೇ ಕೆಎ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ ಮತ್ತು ಆರಂಭಿಕ ಪ್ರತಿರೋಧವನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ಪರಿಚಯಿಸಿದಾಗ ಮೋಟಾರ್ ವೇಗಗೊಳ್ಳುತ್ತದೆ. ಆರಂಭಿಕ ಸ್ವಿಚಿಂಗ್ ಕರೆಂಟ್ ಕಡಿಮೆಯಾದಂತೆ, ಕೆಎ ರಿಲೇಯ ಸಂಪರ್ಕಗಳು ಮುಚ್ಚಲ್ಪಡುತ್ತವೆ ಮತ್ತು ಕಾಯಿಲ್ ಕೆ 1 ಆನ್ ಆಗುತ್ತದೆ. ಅದೇ ಸಮಯದಲ್ಲಿ, ಸಂಪರ್ಕ K1 ಮುಚ್ಚುತ್ತದೆ, ರಿಲೇ KA ಯಿಂದ ಸ್ವತಂತ್ರವಾಗಿ ಸುರುಳಿಯ ಸ್ವಯಂ-ಶಕ್ತಿಯನ್ನು ಒದಗಿಸುತ್ತದೆ, ಮತ್ತು ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ ಸಂಪರ್ಕವು ತೆರೆಯುತ್ತದೆ, ವೇಗವರ್ಧಕ K2 ನ ಅಕಾಲಿಕ ಸೇರ್ಪಡೆಯನ್ನು ತಡೆಯುತ್ತದೆ.
ಪೂರೈಕೆ ಸಂಪರ್ಕಗಳು ಕೆ 1 ಆರಂಭಿಕ ಪ್ರತಿರೋಧದ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ನ ಭಾಗವಾಗಿರುವುದರಿಂದ, ಸ್ಟೇಟರ್ ಪ್ರವಾಹವು ಗರಿಷ್ಠ ಮೌಲ್ಯಕ್ಕೆ ಹೆಚ್ಚಾಗುತ್ತದೆ ಮತ್ತು ರಿಲೇ ಕೆಎ, ಪ್ರಚೋದಿಸಿದಾಗ, ಕಾಯಿಲ್ ಕೆ 2 ನ ಪೂರೈಕೆ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಅದರ ಸಂಪರ್ಕಗಳನ್ನು ತೆರೆಯುತ್ತದೆ. ಮೋಟಾರ್ ಸಾಕಷ್ಟು ವೇಗವನ್ನು ತಲುಪಿದಾಗ ಮತ್ತು ಸ್ಟೇಟರ್ ಕರೆಂಟ್ ಸ್ವಿಚಿಂಗ್ ಕರೆಂಟ್ಗೆ ಹಿಂತಿರುಗಿದಾಗ, ರಿಲೇ ಕೆಎ ಸಂಪರ್ಕಗಳು ಮುಚ್ಚುತ್ತವೆ ಮತ್ತು ಕಾಯಿಲ್ ಕೆ 2 ಅನ್ನು ಆನ್ ಮಾಡುತ್ತದೆ, ಇದು ಅದರ ಸಂಪರ್ಕಗಳಿಗೆ ಪ್ರತಿರೋಧವನ್ನು ಪ್ರಾರಂಭಿಸುವ ಎರಡನೇ ಹಂತವನ್ನು ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಮಾಡುತ್ತದೆ.
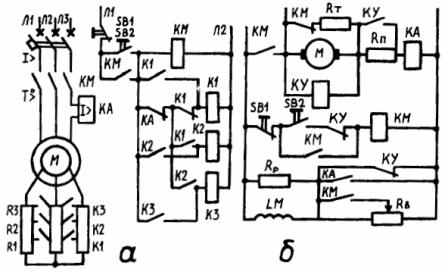
ಅಕ್ಕಿ. 1. ಪ್ರಸ್ತುತವನ್ನು ಅವಲಂಬಿಸಿ ಕಂಟ್ರೋಲ್ ಸರ್ಕ್ಯೂಟ್ಗಳು: a - ಒಂದು ಹಂತದ ರೋಟರ್ನೊಂದಿಗೆ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್; b - ಸಮಾನಾಂತರ ಪ್ರಚೋದನೆಯೊಂದಿಗೆ DC ಮೋಟಾರ್
ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಸ್ಟೇಟರ್ ಕರೆಂಟ್ ಮತ್ತೆ ಹೆಚ್ಚಾಗುತ್ತದೆ, ಕೆಎ ರಿಲೇ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ ಮತ್ತು ಅದರ ಸಂಪರ್ಕಗಳನ್ನು ತೆರೆಯುತ್ತದೆ. ಸಹಾಯಕ ಸಂಪರ್ಕಗಳು K2 ನೊಂದಿಗೆ ಮುಚ್ಚಲು ಸಮಯವಿರುವುದರಿಂದ ಕಾಯಿಲ್ K2 ಶಕ್ತಿಯನ್ನು ಕಳೆದುಕೊಳ್ಳುವುದಿಲ್ಲ.ಮುಂದಿನ ವೇಗವರ್ಧನೆಯ ನಂತರ ಸ್ಟೇಟರ್ ಪ್ರವಾಹದಲ್ಲಿ ಮತ್ತಷ್ಟು ಇಳಿಕೆಯು ಅಂಕುಡೊಂಕಾದ K3 ಅನ್ನು ಆನ್ ಮಾಡಲು ಮತ್ತು ಆರಂಭಿಕ ಪ್ರತಿರೋಧದ ಕೊನೆಯ ಹಂತವನ್ನು ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಮಾಡಲು ಕಾರಣವಾಗುತ್ತದೆ. SB ಗುಂಡಿಯನ್ನು ಒತ್ತುವುದರಿಂದ ಮೋಟಾರ್ ನಿಲ್ಲುತ್ತದೆ ಮತ್ತು ಸರ್ಕ್ಯೂಟ್ ಮುಂದಿನ ಪ್ರಾರಂಭಕ್ಕೆ ಸಿದ್ಧವಾಗಿದೆ. 12 ರ ಪ್ರವಾಹದಲ್ಲಿ ಹಿಂತಿರುಗಲು ಕಾನ್ಫಿಗರ್ ಮಾಡಲಾದ ಪ್ರಸ್ತುತ ರಿಲೇಗಳನ್ನು ಬಳಸಿ, ವಿವಿಧ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ಗಳನ್ನು ನಿಲ್ಲಿಸಬಹುದು ಮತ್ತು ಹಿಂತಿರುಗಿಸಬಹುದು. ಪ್ರಸ್ತುತ ಕಾರ್ಯದಲ್ಲಿ ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ಗಳ ಅನನುಕೂಲವೆಂದರೆ ದೊಡ್ಡ ಸಂಖ್ಯೆಯ ಸಂಪರ್ಕಗಳು.
ಹಲವಾರು ಕಿಲೋವ್ಯಾಟ್ಗಳ ಸಮಾನಾಂತರ-ಪ್ರಚೋದಿತ DC ಮೋಟರ್ನ ಬದಲಾಯಿಸಲಾಗದ ನಿಯಂತ್ರಣಕ್ಕಾಗಿ, ಆರಂಭಿಕ ರಿಯೊಸ್ಟಾಟ್ನ ಒಂದು ಹಂತವನ್ನು ಬಳಸಬಹುದು (Fig. C ನೋಡಿ). ರೇಖಾಚಿತ್ರವು ತೋರಿಸುತ್ತದೆ: ಪ್ರಚೋದನೆಯ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಪ್ರತಿರೋಧ ಆರ್ಬಿಯನ್ನು ನಿಯಂತ್ರಿಸುವುದು; ಡಿಸ್ಚಾರ್ಜ್ ಪ್ರತಿರೋಧ ಆರ್ಪಿ ಪ್ರಚೋದನೆಯ ಸುರುಳಿ LM ನೊಂದಿಗೆ ಸಮಾನಾಂತರವಾಗಿ ಸಂಪರ್ಕಗೊಂಡಿದೆ; ನೆಟ್ವರ್ಕ್ನಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಂಡಾಗ ಆರ್ಮೇಚರ್ M ಗೆ ಸಮಾನಾಂತರವಾಗಿ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಬ್ರೇಕಿಂಗ್ ಪ್ರತಿರೋಧ RT ಮತ್ತು ಆರಂಭಿಕ ಅವಧಿಯಲ್ಲಿ ಆರ್ಮೇಚರ್ ಸರ್ಕ್ಯೂಟ್ಗೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕಗೊಂಡ ಆರಂಭಿಕ ಪ್ರತಿರೋಧ RP. ಪ್ರಾರಂಭದಲ್ಲಿ ಗರಿಷ್ಟ ಫ್ಲಕ್ಸ್ ಅನ್ನು ಉತ್ಪಾದಿಸಲು, ಆರಂಭಿಕ ಸ್ಥಾನದಲ್ಲಿ LM ಫೀಲ್ಡ್ ಕಾಯಿಲ್ ಅನ್ನು ಪೂರ್ಣ ವೋಲ್ಟೇಜ್ನಲ್ಲಿ ಆನ್ ಮಾಡಲಾಗಿದೆ.
SB2 ಗುಂಡಿಯನ್ನು ಒತ್ತಿದಾಗ, ಲೈನ್ ಕಾಂಟ್ಯಾಕ್ಟರ್ KM ನಿಂದ ಮೋಟರ್ನ ಆರ್ಮೇಚರ್ ಪ್ರತಿರೋಧ RP ಯೊಂದಿಗೆ ನೆಟ್ವರ್ಕ್ಗೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕ ಹೊಂದಿದೆ.ಸ್ಟಾರ್ಟರ್ ಕಂಟ್ರೋಲ್ ರಿಲೇ SC ಆರ್ಮೇಚರ್ ಪ್ರವಾಹದ ಕಾರ್ಯವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಪ್ರಸ್ತುತ ಹೆಚ್ಚಾದಂತೆ, KA ಯ ಮುಚ್ಚುವ ಸಂಪರ್ಕವು ಪ್ರತಿರೋಧ RB ಅನ್ನು ಕುಶಲತೆಯಿಂದ ನಿರ್ವಹಿಸುತ್ತದೆ, ಪ್ರಚೋದನೆಯ ಕಾಂತೀಯ ಹರಿವನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ, ಮತ್ತು ಪ್ರಸ್ತುತ ಕಡಿಮೆಯಾದಂತೆ, KA ಯ ಸಂಪರ್ಕವು ತೆರೆಯುತ್ತದೆ ಮತ್ತು LM ಸುರುಳಿಯು rheostat RB ಯ ಪ್ರತಿರೋಧದೊಂದಿಗೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕಗೊಳ್ಳುತ್ತದೆ. ಕಾಂತೀಯ ಪ್ರವಾಹವು ಕಡಿಮೆಯಾಗುತ್ತದೆ.
ಮೋಟಾರು ಪ್ರಾರಂಭವಾದಾಗ, ಹೆಚ್ಚಿದ ಆರಂಭಿಕ ಆರ್ಮೇಚರ್ ಪ್ರವಾಹವು KA ರಿಲೇನಲ್ಲಿ ತಿರುಗುತ್ತದೆ ಮತ್ತು LM ಕಾಯಿಲ್ ಗರಿಷ್ಠ ಫ್ಲಕ್ಸ್ ಅನ್ನು ರಚಿಸುತ್ತದೆ. ನಿರ್ದಿಷ್ಟ ವೇಗವನ್ನು ತಲುಪಿದಾಗ, ವೇಗವರ್ಧಕ ಸಂಪರ್ಕಕಾರ ಕೆ ಆನ್ ಆಗಿದೆ, ಆರಂಭಿಕ ಪ್ರತಿರೋಧ ಆರ್ಪಿ ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಆಗಿರುತ್ತದೆ, ಅದರ ನಂತರ ಮೋಟಾರ್ ಅದರ ನೈಸರ್ಗಿಕ ಗುಣಲಕ್ಷಣಗಳ ಪ್ರಕಾರ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಆರ್ಮೇಚರ್ ಕರೆಂಟ್ ಕಡಿಮೆಯಾದಾಗ (ಮೋಟಾರ್ ವೇಗವರ್ಧನೆಯ ಪರಿಣಾಮವಾಗಿ) ಕೆಎ ರಿಲೇ ಶಕ್ತಿ ತುಂಬುವ ಮೊದಲು, ಪ್ರಚೋದನೆಯ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಕೆಎ ಸಂಪರ್ಕವು ತೆರೆಯುತ್ತದೆ.
LM ವಿಂಡಿಂಗ್ RB ಪ್ರತಿರೋಧದೊಂದಿಗೆ ಸರಣಿಯಲ್ಲಿ ಆನ್ ಆಗುತ್ತದೆ, ಇದರಿಂದಾಗಿ ಕ್ಷೇತ್ರ ಹರಿವು ದುರ್ಬಲಗೊಳ್ಳುತ್ತದೆ ಮತ್ತು ಆರ್ಮೇಚರ್ ಪ್ರವಾಹವು ಅದಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಹೆಚ್ಚಾಗುತ್ತದೆ. KA ರಿಲೇ ಮತ್ತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಫ್ಲಕ್ಸ್ ಅನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ ಮತ್ತು ಏಕಕಾಲದಲ್ಲಿ ಮೋಟಾರ್ ವೇಗವನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ. ಪ್ರಾರಂಭದ ಸಮಯದಲ್ಲಿ, ಮೋಟಾರು RB ಕಂಟ್ರೋಲ್ ರಿಯೋಸ್ಟಾಟ್ ನಿಗದಿಪಡಿಸಿದ ವೇಗವನ್ನು ತಲುಪುವವರೆಗೆ ಬಾಹ್ಯಾಕಾಶ ನೌಕೆಯ ಪ್ರಸಾರವನ್ನು ಹಲವಾರು ಬಾರಿ ಪ್ರಚೋದಿಸಲಾಗುತ್ತದೆ. ಪ್ರಸ್ತುತ ಕಾರ್ಯವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಅಂತಹ ಕಂಪಿಸುವ ಸಾಧನವು ಸಮಯದ ಕಾರ್ಯವಾಗಿ ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ಗಳಿಗೆ ಹೋಲಿಸಿದರೆ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಸರಳಗೊಳಿಸುತ್ತದೆ.
SB1 ಗುಂಡಿಯನ್ನು ಒತ್ತುವ ಮೂಲಕ ಮೋಟಾರ್ ಅನ್ನು ಆನ್ ಮಾಡಿದಾಗ, ಆರ್ಮೇಚರ್ ಅನ್ನು ಆರಂಭಿಕ ಸಂಪರ್ಕ KM ನಿಂದ ಬ್ರೇಕಿಂಗ್ ರೆಸಿಸ್ಟರ್ RT ಗೆ ಆನ್ ಮಾಡಲಾಗುತ್ತದೆ ಮತ್ತು ಡೈನಾಮಿಕ್ ಬ್ರೇಕಿಂಗ್ ಅನ್ನು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ನಿರ್ವಹಿಸಲಾಗುತ್ತದೆ. ನಿಲುಗಡೆಯ ಆರಂಭದಲ್ಲಿ, ರೆಗ್ಯುಲೇಟಿಂಗ್ ರಿಯೊಸ್ಟಾಟ್ನ ಸ್ಲೈಡರ್ನಲ್ಲಿ KM ಸಂಪರ್ಕವನ್ನು ತೆರೆಯುವ ಕಾರಣದಿಂದಾಗಿ ಆಯಸ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರವು ಸ್ವಲ್ಪ ದುರ್ಬಲಗೊಳ್ಳುತ್ತದೆ, ಮತ್ತು ಪ್ರಚೋದನೆಯ ಪ್ರವಾಹವು ಸಂಪೂರ್ಣ ಪ್ರತಿರೋಧ RB ಮೂಲಕ ಹಾದುಹೋಗುತ್ತದೆ. ಮೋಟಾರು ವೇಗವು ಮತ್ತಷ್ಟು ಕಡಿಮೆಯಾದಂತೆ, ವೇಗವರ್ಧನೆಯ ಕಾಂಟ್ಯಾಕ್ಟರ್ ಕೆ ಡಿ-ಎನರ್ಜೈಸ್ಡ್ ಆಗುತ್ತದೆ ಮತ್ತು ಪ್ರಚೋದನೆಯ ಸುರುಳಿಯು ಪ್ರಾರಂಭಿಕ ಸಂಪರ್ಕದ ಮೂಲಕ ಪೂರ್ಣ ಲೈನ್ ವೋಲ್ಟೇಜ್ಗೆ ಸ್ವಿಚ್ ಆಗುವುದರಿಂದ ಫ್ಲಕ್ಸ್ ಹೆಚ್ಚಾಗುತ್ತದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್ ಹೆಚ್ಚಾಗುತ್ತದೆ.