ಆಧುನಿಕ ಉತ್ಪಾದನೆಯಲ್ಲಿ ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ಗಳು - ವಿಧಗಳು ಮತ್ತು ಸಾಧನಗಳು
ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ಗಳನ್ನು ಇಂದು ಮಾನವ ಉತ್ಪಾದನೆಯಲ್ಲಿ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಅವು ಸಾರಿಗೆ ಮತ್ತು ಸರಕು ಕಾರ್ಯಾಚರಣೆಗಳ ಯಾಂತ್ರೀಕರಣ ಮತ್ತು ಯಾಂತ್ರೀಕೃತಗೊಂಡ ಅತ್ಯಂತ ಪರಿಣಾಮಕಾರಿ ಸಾಧನವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ, ಜೊತೆಗೆ ಅನೇಕ ತಾಂತ್ರಿಕ ಪ್ರಕ್ರಿಯೆಗಳು.
ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ಗಳ ಪರಿಚಯದ ಸಕಾರಾತ್ಮಕ ಪರಿಣಾಮವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಹಲವಾರು ಕಡೆಗಳಿಂದ ಏಕಕಾಲದಲ್ಲಿ ಗಮನಿಸಬಹುದು: ಕಾರ್ಮಿಕ ಉತ್ಪಾದಕತೆ ಹೆಚ್ಚಾಗುತ್ತದೆ, ಅಂತಿಮ ಉತ್ಪನ್ನದ ಗುಣಮಟ್ಟ ಸುಧಾರಿಸುತ್ತದೆ, ಉತ್ಪಾದನಾ ವೆಚ್ಚ ಕಡಿಮೆಯಾಗುತ್ತದೆ, ವ್ಯಕ್ತಿಯ ಕೆಲಸದ ಪರಿಸ್ಥಿತಿಗಳು ಸುಧಾರಿಸುತ್ತದೆ ಮತ್ತು ಅಂತಿಮವಾಗಿ, ಉದ್ಯಮದಿಂದ ಉದ್ಯಮದ ಪರಿವರ್ತನೆ ಒಂದು ರೀತಿಯ ಉತ್ಪನ್ನವನ್ನು ಇನ್ನೊಂದರಲ್ಲಿ ಬಿಡುಗಡೆ ಮಾಡಲು ಹೆಚ್ಚು ಅನುಕೂಲವಾಗುತ್ತದೆ.
ಆದಾಗ್ಯೂ, ಈಗಾಗಲೇ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತಿರುವ ಕೈಪಿಡಿ ಉತ್ಪಾದನೆಯಲ್ಲಿ ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ಗಳ ಪರಿಚಯದ ಅಂತಹ ವ್ಯಾಪಕ ಮತ್ತು ಬಹುಮುಖಿ ಧನಾತ್ಮಕ ಪರಿಣಾಮವನ್ನು ಸಾಧಿಸಲು, ರೋಬೋಟ್ನ ಬೆಲೆಗೆ, ಅನುಷ್ಠಾನ ಪ್ರಕ್ರಿಯೆಗೆ ಯೋಜಿತ ವೆಚ್ಚಗಳನ್ನು ಮುಂಚಿತವಾಗಿ ಲೆಕ್ಕಾಚಾರ ಮಾಡುವುದು ಅವಶ್ಯಕ. ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ಗಳನ್ನು ಸ್ಥಾಪಿಸಲು ಸಹಾಯ ಮಾಡುವ ಆಧುನೀಕರಣ ಯೋಜನೆಗೆ ನಿಮ್ಮ ಉತ್ಪಾದನೆಯ ಸಂಕೀರ್ಣತೆ ಮತ್ತು ತಾಂತ್ರಿಕ ಪ್ರಕ್ರಿಯೆಯು ಸಾಮಾನ್ಯವಾಗಿ ಸಮರ್ಪಕವಾಗಿದೆಯೇ ಎಂಬುದನ್ನು ಅಳೆಯಲು.
ವಾಸ್ತವವಾಗಿ, ಕೆಲವೊಮ್ಮೆ ಆರಂಭದಲ್ಲಿ ಉತ್ಪಾದನೆಯು ತುಂಬಾ ಸರಳೀಕೃತವಾಗಿದೆ, ರೋಬೋಟ್ಗಳನ್ನು ಸ್ಥಾಪಿಸುವುದು ಸರಳವಾಗಿ ಅಪ್ರಾಯೋಗಿಕ ಮತ್ತು ಹಾನಿಕಾರಕವಾಗಿದೆ. ಹೆಚ್ಚುವರಿಯಾಗಿ, ಸೆಟಪ್, ನಿರ್ವಹಣೆ, ರೋಬೋಟ್ಗಳ ಪ್ರೋಗ್ರಾಮಿಂಗ್ ಮತ್ತು ಕೆಲಸದ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಅರ್ಹ ಸಿಬ್ಬಂದಿ ಅಗತ್ಯವಿರುತ್ತದೆ - ಸಹಾಯಕ ಸಾಧನಗಳು, ಇತ್ಯಾದಿ. ಇದನ್ನು ಮುಂಚಿತವಾಗಿ ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುವುದು ಮುಖ್ಯ.
ಒಂದು ರೀತಿಯಲ್ಲಿ ಅಥವಾ ಇನ್ನೊಂದು ರೀತಿಯಲ್ಲಿ, ಉತ್ಪಾದನೆಯಲ್ಲಿ ರೋಬೋಟಿಕ್ ಮಾನವರಹಿತ ಪರಿಹಾರಗಳು ಇಂದು ಹೆಚ್ಚು ಪ್ರಸ್ತುತವಾಗುತ್ತಿವೆ, ಏಕೆಂದರೆ ಮಾನವನ ಆರೋಗ್ಯದ ಮೇಲೆ ಹಾನಿಕಾರಕ ಪರಿಣಾಮವು ಕಡಿಮೆಯಾಗಿದೆ. ಸಂಸ್ಕರಣೆ ಮತ್ತು ಅನುಸ್ಥಾಪನೆಯ ಪೂರ್ಣ ಚಕ್ರವನ್ನು ವೇಗವಾಗಿ ಮಾಡಲಾಗುತ್ತದೆ ಎಂಬ ತಿಳುವಳಿಕೆಯನ್ನು ಇಲ್ಲಿ ಸೇರಿಸೋಣ, ಹೊಗೆ ವಿರಾಮಗಳಿಗೆ ವಿರಾಮಗಳಿಲ್ಲದೆ ಮತ್ತು ರೋಬೋಟ್ ಬದಲಿಗೆ ಜೀವಂತ ವ್ಯಕ್ತಿಯು ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಯಾವುದೇ ಉತ್ಪಾದನೆಯಲ್ಲಿ ಅಂತರ್ಗತವಾಗಿರುವ ದೋಷಗಳಿಲ್ಲದೆ. ರೋಬೋಟ್ಗಳನ್ನು ಸ್ಥಾಪಿಸಿದ ನಂತರ ಮತ್ತು ತಾಂತ್ರಿಕ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಪ್ರಾರಂಭಿಸಿದ ನಂತರ ಮಾನವ ಅಂಶವನ್ನು ಪ್ರಾಯೋಗಿಕವಾಗಿ ಹೊರಗಿಡಲಾಗುತ್ತದೆ.
ಇಂದು, ಹಸ್ತಚಾಲಿತ ಕಾರ್ಮಿಕರನ್ನು ಹೆಚ್ಚಿನ ಸಂದರ್ಭಗಳಲ್ಲಿ ರೋಬೋಟಿಕ್ ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ನ ಶ್ರಮದಿಂದ ಬದಲಾಯಿಸಲಾಗುತ್ತದೆ: ಟೂಲ್ ಗ್ರಿಪ್, ಟೂಲ್ ಫಿಕ್ಸೇಶನ್, ವರ್ಕ್ಪೀಸ್ ಧಾರಣ, ಕೆಲಸದ ಪ್ರದೇಶಕ್ಕೆ ಆಹಾರ. ಮಿತಿಗಳನ್ನು ಮಾತ್ರ ವಿಧಿಸಲಾಗುತ್ತದೆ: ಲೋಡ್ ಸಾಮರ್ಥ್ಯ, ಸೀಮಿತ ಕೆಲಸದ ಪ್ರದೇಶ, ಪೂರ್ವ-ಪ್ರೋಗ್ರಾಮ್ ಮಾಡಿದ ಚಲನೆಗಳು.
ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ ಒದಗಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ:
-
ವೇಗದ ಮತ್ತು ನಿಖರವಾದ ಸ್ಥಾನೀಕರಣಕ್ಕೆ ಹೆಚ್ಚಿನ ಉತ್ಪಾದಕತೆ ಧನ್ಯವಾದಗಳು; ಉತ್ತಮ ದಕ್ಷತೆ, ಅವನು ಬದಲಿಸುವ ಜನರಿಗೆ ಸಂಬಳವನ್ನು ಪಾವತಿಸುವ ಅಗತ್ಯವಿಲ್ಲದ ಕಾರಣ, ಒಬ್ಬ ಆಪರೇಟರ್ ಸಾಕು;
-
ಉತ್ತಮ ಗುಣಮಟ್ಟದ - 0.05 ಮಿಮೀ ಕ್ರಮದ ನಿಖರತೆ, ಮದುವೆಯ ಕಡಿಮೆ ಸಂಭವನೀಯತೆ;
-
ಮಾನವನ ಆರೋಗ್ಯಕ್ಕೆ ಸುರಕ್ಷತೆ, ಉದಾಹರಣೆಗೆ, ಚಿತ್ರಕಲೆ ಮಾಡುವಾಗ, ಬಣ್ಣಗಳು ಮತ್ತು ವಾರ್ನಿಷ್ಗಳೊಂದಿಗಿನ ಮಾನವ ಸಂಪರ್ಕವನ್ನು ಈಗ ಹೊರಗಿಡಲಾಗಿದೆ;
-
ಅಂತಿಮವಾಗಿ, ರೋಬೋಟ್ನ ಕೆಲಸದ ಪ್ರದೇಶವು ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಸೀಮಿತವಾಗಿದೆ ಮತ್ತು ಕನಿಷ್ಠ ನಿರ್ವಹಣೆ ಅಗತ್ಯವಿರುತ್ತದೆ, ಕೆಲಸದ ವಾತಾವರಣವು ರಾಸಾಯನಿಕವಾಗಿ ಆಕ್ರಮಣಕಾರಿಯಾಗಿದ್ದರೂ ಸಹ, ರೋಬೋಟ್ನ ವಸ್ತುವು ಈ ಪರಿಣಾಮವನ್ನು ತಡೆದುಕೊಳ್ಳುತ್ತದೆ.

ಐತಿಹಾಸಿಕವಾಗಿ, ಮೊದಲ ಪೇಟೆಂಟ್ ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ ಅನ್ನು 1961 ರಲ್ಲಿ ನ್ಯೂಜೆರ್ಸಿಯ ಜನರಲ್ ಮೋಟಾರ್ಸ್ ಸ್ಥಾವರಕ್ಕಾಗಿ ಯುನಿಮೇಷನ್ ಇಂಕ್ ಬಿಡುಗಡೆ ಮಾಡಿತು. ರೋಬೋಟ್ನ ಕ್ರಿಯೆಗಳ ಅನುಕ್ರಮವನ್ನು ಮ್ಯಾಗ್ನೆಟಿಕ್ ಡ್ರಮ್ನಲ್ಲಿ ಕೋಡ್ ರೂಪದಲ್ಲಿ ದಾಖಲಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಸಾಮಾನ್ಯ ನಿರ್ದೇಶಾಂಕಗಳಲ್ಲಿ ಕಾರ್ಯಗತಗೊಳಿಸಲಾಗುತ್ತದೆ. ಕ್ರಿಯೆಗಳನ್ನು ನಿರ್ವಹಿಸಲು, ರೋಬೋಟ್ ಹೈಡ್ರಾಲಿಕ್ ಆಂಪ್ಲಿಫೈಯರ್ಗಳನ್ನು ಬಳಸುತ್ತದೆ. ಈ ತಂತ್ರಜ್ಞಾನವನ್ನು ನಂತರ ಜಪಾನೀಸ್ ಕವಾಸಕಿ ಹೆವಿ ಇಂಡಸ್ಟ್ರೀಸ್ ಮತ್ತು ಇಂಗ್ಲಿಷ್ ಅತಿಥಿ, ಕೀನ್ ಮತ್ತು ನೆಟಲ್ಫೋಲ್ಡ್ಗಳಿಗೆ ವರ್ಗಾಯಿಸಲಾಯಿತು.ಹೀಗಾಗಿ, ಯುನಿಮೇಷನ್ ಇಂಕ್ನಿಂದ ರೋಬೋಟ್ಗಳ ಉತ್ಪಾದನೆಯು ಸ್ವಲ್ಪಮಟ್ಟಿಗೆ ವಿಸ್ತರಿಸಿತು.
1970 ರ ಹೊತ್ತಿಗೆ, ಸ್ಟ್ಯಾನ್ಫೋರ್ಡ್ ವಿಶ್ವವಿದ್ಯಾಲಯವು 6 ಡಿಗ್ರಿ ಸ್ವಾತಂತ್ರ್ಯದೊಂದಿಗೆ ಮಾನವ ತೋಳಿನ ಸಾಮರ್ಥ್ಯಗಳನ್ನು ಹೋಲುವ ಮೊದಲ ರೋಬೋಟ್ ಅನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಿತು, ಇದು ಕಂಪ್ಯೂಟರ್ನಿಂದ ನಿಯಂತ್ರಿಸಲ್ಪಡುತ್ತದೆ ಮತ್ತು ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ಗಳನ್ನು ಹೊಂದಿತ್ತು. ಅದೇ ಸಮಯದಲ್ಲಿ, ಜಪಾನಿನ ಕಂಪನಿ ನಾಚಿ ಇದನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುತ್ತಿದೆ. ಜರ್ಮನಿಯ KUKA ರೊಬೊಟಿಕ್ಸ್ 1973 ರಲ್ಲಿ ಫಾಮುಲಸ್ ಸಿಕ್ಸ್-ಆಕ್ಸಿಸ್ ರೋಬೋಟ್ ಅನ್ನು ಪ್ರದರ್ಶಿಸುತ್ತದೆ, ಮತ್ತು ಸ್ವಿಟ್ಜರ್ಲೆಂಡ್ನ ABB ರೋಬೋಟಿಕ್ಸ್ ಈಗ ASEA ರೋಬೋಟ್ ಅನ್ನು ಮಾರಾಟ ಮಾಡಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ, ಇದು ಆರು-ಅಕ್ಷ ಮತ್ತು ಎಲೆಕ್ಟ್ರೋಮೆಕಾನಿಕಲ್ ಚಾಲಿತವಾಗಿದೆ.
1974 ರಲ್ಲಿ, ಜಪಾನಿನ ಕಂಪನಿ ಫ್ಯಾನುಕ್ ತನ್ನದೇ ಆದ ಉತ್ಪಾದನೆಯನ್ನು ಸ್ಥಾಪಿಸಿತು. 1977 ರಲ್ಲಿ, ಮೊದಲ ಯಾಸ್ಕವಾ ರೋಬೋಟ್ ಅನ್ನು ಉತ್ಪಾದಿಸಲಾಯಿತು.ಕಂಪ್ಯೂಟರ್ ತಂತ್ರಜ್ಞಾನದ ಅಭಿವೃದ್ಧಿಯೊಂದಿಗೆ, ರೋಬೋಟ್ಗಳನ್ನು ಆಟೋಮೋಟಿವ್ ಉದ್ಯಮಕ್ಕೆ ಹೆಚ್ಚು ಪರಿಚಯಿಸಲಾಯಿತು: 1980 ರ ದಶಕದ ಆರಂಭದಲ್ಲಿ, ಜನರಲ್ ಮೋಟಾರ್ಸ್ ತನ್ನದೇ ಆದ ಕಾರ್ಖಾನೆಯ ಯಾಂತ್ರೀಕೃತಗೊಂಡ ವ್ಯವಸ್ಥೆಯ ರಚನೆಯಲ್ಲಿ ನಲವತ್ತು ಶತಕೋಟಿ ಡಾಲರ್ಗಳನ್ನು ಹೂಡಿಕೆ ಮಾಡಿತು.
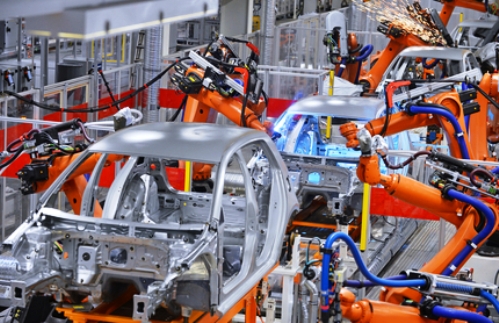
1984 ರಲ್ಲಿ, ದೇಶೀಯ ಅವ್ಟೋವಾಜ್ KUKA ರೊಬೊಟಿಕ್ಸ್ನಿಂದ ಪರವಾನಗಿಯನ್ನು ಪಡೆದುಕೊಂಡಿತು ಮತ್ತು ತನ್ನದೇ ಆದ ಉತ್ಪಾದನಾ ಮಾರ್ಗಗಳಿಗಾಗಿ ರೋಬೋಟ್ಗಳನ್ನು ಉತ್ಪಾದಿಸಲು ಪ್ರಾರಂಭಿಸಿತು. ಪ್ರಪಂಚದ ಎಲ್ಲಾ ರೋಬೋಟ್ಗಳಲ್ಲಿ ಸುಮಾರು 70%, 1995 ರ ಹೊತ್ತಿಗೆ, ಅದರ ದೇಶೀಯ ಮಾರುಕಟ್ಟೆಯಾದ ಜಪಾನ್ನಲ್ಲಿರುತ್ತದೆ. ಈ ರೀತಿಯಾಗಿ, ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ಗಳು ಅಂತಿಮವಾಗಿ ಆಟೋಮೋಟಿವ್ ಉದ್ಯಮದಲ್ಲಿ ತಮ್ಮನ್ನು ತಾವು ಸ್ಥಾಪಿಸಿಕೊಳ್ಳುತ್ತವೆ.

ವೆಲ್ಡಿಂಗ್ ಇಲ್ಲದೆ ಆಟೋಮೋಟಿವ್ ತಯಾರಿಕೆಯು ಹೇಗೆ ಹೋಗುತ್ತದೆ? ಅಸಾದ್ಯ. ಆದ್ದರಿಂದ ಪ್ರಪಂಚದ ಎಲ್ಲಾ ಆಟೋಮೋಟಿವ್ ಉದ್ಯಮಗಳು ನೂರಾರು ರೋಬೋಟಿಕ್ ವೆಲ್ಡಿಂಗ್ ಸಂಕೀರ್ಣಗಳೊಂದಿಗೆ ಅಳವಡಿಸಲ್ಪಟ್ಟಿವೆ ಎಂದು ಅದು ತಿರುಗುತ್ತದೆ. ಪ್ರತಿ ಐದನೇ ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ ವೆಲ್ಡಿಂಗ್ನಲ್ಲಿ ತೊಡಗಿಸಿಕೊಂಡಿದೆ. ಮುಂದಿನ ಬೇಡಿಕೆಯು ರೋಬೋಟಿಕ್ ಲೋಡರ್ ಆಗಿದೆ, ಆದರೆ ಆರ್ಗಾನ್ ಆರ್ಕ್ ಮತ್ತು ಸ್ಪಾಟ್ ವೆಲ್ಡಿಂಗ್ ಮೊದಲು ಬರುತ್ತವೆ.
ಯಾವುದೇ ಹಸ್ತಚಾಲಿತ ವೆಲ್ಡಿಂಗ್ ವಿಶೇಷ ರೋಬೋಟ್ನೊಂದಿಗೆ ಸೀಮ್ ಗುಣಮಟ್ಟ ಮತ್ತು ಪ್ರಕ್ರಿಯೆ ನಿಯಂತ್ರಣದ ಮಟ್ಟಕ್ಕೆ ಹೊಂದಿಕೆಯಾಗುವುದಿಲ್ಲ. ಲೇಸರ್ ವೆಲ್ಡಿಂಗ್ ಬಗ್ಗೆ ಏನು, ಅಲ್ಲಿ ಕೇಂದ್ರೀಕೃತ ಲೇಸರ್ ಮೂಲಕ 2 ಮೀಟರ್ ದೂರದಿಂದ, ತಾಂತ್ರಿಕ ಪ್ರಕ್ರಿಯೆಯನ್ನು 0.2 ಮಿಮೀ ನಿಖರತೆಯೊಂದಿಗೆ ನಡೆಸಲಾಗುತ್ತದೆ - ಇದು ವಿಮಾನ ನಿರ್ಮಾಣ ಮತ್ತು ಔಷಧದಲ್ಲಿ ಸರಳವಾಗಿ ಭರಿಸಲಾಗದದು. CAD / CAM ಡಿಜಿಟಲ್ ಸಿಸ್ಟಮ್ಗಳೊಂದಿಗೆ ಏಕೀಕರಣವನ್ನು ಸೇರಿಸಿ.
ವೆಲ್ಡಿಂಗ್ ರೋಬೋಟ್ ಮೂರು ಮುಖ್ಯ ಕಾರ್ಯಾಚರಣಾ ಘಟಕಗಳನ್ನು ಹೊಂದಿದೆ: ಕೆಲಸ ಮಾಡುವ ದೇಹ, ಕೆಲಸ ಮಾಡುವ ದೇಹ ಮತ್ತು ಸ್ಮರಣೆಯನ್ನು ನಿಯಂತ್ರಿಸುವ ಕಂಪ್ಯೂಟರ್. ಕೆಲಸ ಮಾಡುವ ದೇಹವು ಕೈಯಂತಹ ಹ್ಯಾಂಡಲ್ ಅನ್ನು ಹೊಂದಿದೆ. ದೇಹವು ಮೂರು ಅಕ್ಷಗಳ (X, Y, Z) ಉದ್ದಕ್ಕೂ ಚಲನೆಯ ಸ್ವಾತಂತ್ರ್ಯವನ್ನು ಹೊಂದಿದೆ ಮತ್ತು ಗ್ರಿಪ್ಪರ್ ಸ್ವತಃ ಈ ಅಕ್ಷಗಳ ಸುತ್ತಲೂ ತಿರುಗಬಹುದು. ರೋಬೋಟ್ ಸ್ವತಃ ಮಾರ್ಗದರ್ಶಿಗಳ ಉದ್ದಕ್ಕೂ ಚಲಿಸಬಹುದು.

ಉತ್ಪನ್ನಗಳ ಗಾತ್ರ ಮತ್ತು ತೂಕವನ್ನು ಲೆಕ್ಕಿಸದೆಯೇ ಯಾವುದೇ ಆಧುನಿಕ ಉತ್ಪಾದನಾ ಸೌಲಭ್ಯವು ಇಳಿಸುವಿಕೆ ಮತ್ತು ಲೋಡ್ ಮಾಡದೆಯೇ ಮಾಡಲು ಸಾಧ್ಯವಿಲ್ಲ. ರೋಬೋಟ್ ಸ್ವತಂತ್ರವಾಗಿ ಯಂತ್ರದಲ್ಲಿ ವರ್ಕ್ಪೀಸ್ ಅನ್ನು ಸ್ಥಾಪಿಸುತ್ತದೆ, ನಂತರ ಅದನ್ನು ಇಳಿಸಿ ಮತ್ತು ಇರಿಸಿ. ರೋಬೋಟ್ ಹಲವಾರು ಯಂತ್ರಗಳೊಂದಿಗೆ ಏಕಕಾಲದಲ್ಲಿ ಸಂವಹನ ನಡೆಸಬಹುದು. ಸಹಜವಾಗಿ, ಈ ಸಂದರ್ಭದಲ್ಲಿ ವಿಮಾನ ನಿಲ್ದಾಣದಲ್ಲಿ ಸಾಮಾನುಗಳನ್ನು ಲೋಡ್ ಮಾಡುವ ಬಗ್ಗೆ ನಾವು ಸಹಾಯ ಮಾಡದೆ ಇರಲು ಸಾಧ್ಯವಿಲ್ಲ.
ರೋಬೋಟ್ಗಳು ಈಗಾಗಲೇ ಸಿಬ್ಬಂದಿ ವೆಚ್ಚವನ್ನು ಕನಿಷ್ಠಕ್ಕೆ ತಗ್ಗಿಸಲು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಇದು ಪಂಚಿಂಗ್ ಅಥವಾ ಓವನ್ ಕಾರ್ಯಾಚರಣೆಯಂತಹ ಸರಳ ಕಾರ್ಯಗಳ ಬಗ್ಗೆ ಮಾತ್ರವಲ್ಲ. ರೋಬೋಟ್ಗಳು ಹೆಚ್ಚು ಕಷ್ಟಕರ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಹೆಚ್ಚು ಭಾರವನ್ನು ಎತ್ತುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿವೆ, ಆದರೆ ದಣಿದಿಲ್ಲ ಮತ್ತು ಜೀವಂತ ವ್ಯಕ್ತಿಗಿಂತ ಕಡಿಮೆ ಸಮಯವನ್ನು ಕಳೆಯುತ್ತವೆ.
ಫೌಂಡರಿಗಳು ಮತ್ತು ಕಮ್ಮಾರರಲ್ಲಿ, ಉದಾಹರಣೆಗೆ, ಪರಿಸ್ಥಿತಿಗಳು ಸಾಂಪ್ರದಾಯಿಕವಾಗಿ ಜನರಿಗೆ ತುಂಬಾ ಕಷ್ಟಕರವಾಗಿದೆ. ರೋಬೋಟೈಸೇಶನ್ ವಿಷಯದಲ್ಲಿ ಇಳಿಸುವಿಕೆ ಮತ್ತು ಲೋಡ್ ಮಾಡಿದ ನಂತರ ಈ ರೀತಿಯ ಉತ್ಪಾದನೆಯು ಮೂರನೇ ಸ್ಥಾನದಲ್ಲಿದೆ. ಬಹುತೇಕ ಎಲ್ಲಾ ಯುರೋಪಿಯನ್ ಫೌಂಡರಿಗಳು ಈಗ ಕೈಗಾರಿಕಾ ರೋಬೋಟ್ಗಳೊಂದಿಗೆ ಸ್ವಯಂಚಾಲಿತ ವ್ಯವಸ್ಥೆಗಳೊಂದಿಗೆ ಸುಸಜ್ಜಿತವಾಗಿವೆ ಎಂಬುದು ಕಾಕತಾಳೀಯವಲ್ಲ. ರೋಬೋಟ್ ಅನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸುವ ವೆಚ್ಚವು ಎಂಟರ್ಪ್ರೈಸ್ಗೆ ನೂರಾರು ಸಾವಿರ ಡಾಲರ್ಗಳನ್ನು ವೆಚ್ಚ ಮಾಡುತ್ತದೆ, ಆದರೆ ಅದರ ವಿಲೇವಾರಿಯಲ್ಲಿ ಬಹಳ ಹೊಂದಿಕೊಳ್ಳುವ ಸಂಕೀರ್ಣವು ಕಾಣಿಸಿಕೊಳ್ಳುತ್ತದೆ, ಇದು ಸರಿದೂಗಿಸುವುದಕ್ಕಿಂತ ಹೆಚ್ಚು.

ರೋಬೋಟಿಕ್ ಲೇಸರ್ ಮತ್ತು ಪ್ಲಾಸ್ಮಾ ಕತ್ತರಿಸುವುದು ಪ್ಲಾಸ್ಮಾ ಟಾರ್ಚ್ಗಳೊಂದಿಗೆ ಸಾಂಪ್ರದಾಯಿಕ ರೇಖೆಗಳನ್ನು ಸುಧಾರಿಸಿ. ಮೂರು ಆಯಾಮದ ಕತ್ತರಿಸುವುದು ಮತ್ತು ಮೂಲೆಗಳು ಮತ್ತು ಐ-ಕಿರಣಗಳ ಕತ್ತರಿಸುವುದು, ಮತ್ತಷ್ಟು ಪ್ರಕ್ರಿಯೆಗೆ ತಯಾರಿ, ವೆಲ್ಡಿಂಗ್, ಕೊರೆಯುವಿಕೆ. ಆಟೋಮೋಟಿವ್ ಉದ್ಯಮದಲ್ಲಿ, ಈ ತಂತ್ರಜ್ಞಾನವು ಸರಳವಾಗಿ ಭರಿಸಲಾಗದಂತಿದೆ, ಏಕೆಂದರೆ ಉತ್ಪನ್ನಗಳ ಅಂಚುಗಳನ್ನು ಸ್ಟ್ಯಾಂಪಿಂಗ್ ಮತ್ತು ಆಕಾರದ ನಂತರ ನಿಖರವಾಗಿ ಮತ್ತು ತ್ವರಿತವಾಗಿ ಕತ್ತರಿಸಬೇಕು.
ಅಂತಹ ಒಂದು ರೋಬೋಟ್ ವೆಲ್ಡಿಂಗ್ ಮತ್ತು ಕತ್ತರಿಸುವುದು ಎರಡನ್ನೂ ಸಂಯೋಜಿಸಬಹುದು.ವಾಟರ್ಜೆಟ್ ಕಟಿಂಗ್ನ ಪರಿಚಯದಿಂದ ಉತ್ಪಾದಕತೆ ಹೆಚ್ಚಾಗುತ್ತದೆ, ಇದು ವಸ್ತುವಿನ ಮೇಲೆ ಅನಗತ್ಯ ಶಾಖಕ್ಕೆ ಒಡ್ಡಿಕೊಳ್ಳುವುದನ್ನು ನಿವಾರಿಸುತ್ತದೆ.ಹೀಗೆ, ಎರಡೂವರೆ ನಿಮಿಷಗಳಲ್ಲಿ, ಫ್ರಾನ್ಸ್ನ ರೆನಾಲ್ಟ್ನ ರೋಬೋಟಿಕ್ ಸ್ಥಾವರದಲ್ಲಿ ರೆನಾಲ್ಟ್ ಎಸ್ಪೇಸ್ ಕೂಪ್ಗಳ ಲೋಹದಲ್ಲಿರುವ ಎಲ್ಲಾ ಸಣ್ಣ ರಂಧ್ರಗಳನ್ನು ಕತ್ತರಿಸಲಾಗುತ್ತದೆ.
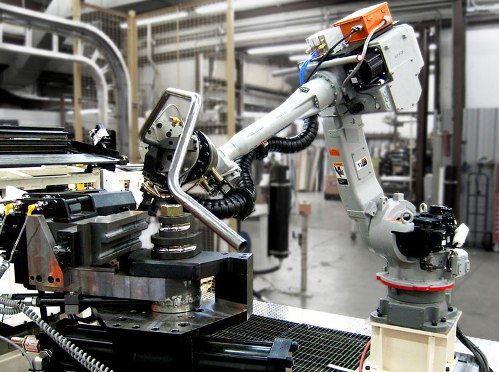
ಪೀಠೋಪಕರಣಗಳು, ಆಟೋಮೊಬೈಲ್ಗಳು ಮತ್ತು ಇತರ ಉತ್ಪನ್ನಗಳ ತಯಾರಿಕೆಯಲ್ಲಿ, ಟ್ಯೂಬ್ ಅನ್ನು ರೋಬೋಟ್ನಿಂದ ಇರಿಸಿದಾಗ ಮತ್ತು ಬೇಗನೆ ಬಾಗಿದ ಸಂದರ್ಭದಲ್ಲಿ ವರ್ಕ್ಹೆಡ್ ಅನ್ನು ಒಳಗೊಂಡಿರುವ ರೋಬೋಟಿಕ್ ಟ್ಯೂಬ್ ಬಾಗುವುದು ಉಪಯುಕ್ತವಾಗಿದೆ. ಅಂತಹ ಪೈಪ್ ಅನ್ನು ಈಗ ವಿವಿಧ ಅಂಶಗಳೊಂದಿಗೆ ಅಳವಡಿಸಬಹುದಾಗಿದೆ, ಅದು ರೋಬೋಟ್ನಿಂದ ಮ್ಯಾಂಡ್ರೆಲ್ಗಳನ್ನು ಬಗ್ಗಿಸುವ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಮಧ್ಯಪ್ರವೇಶಿಸುವುದಿಲ್ಲ.
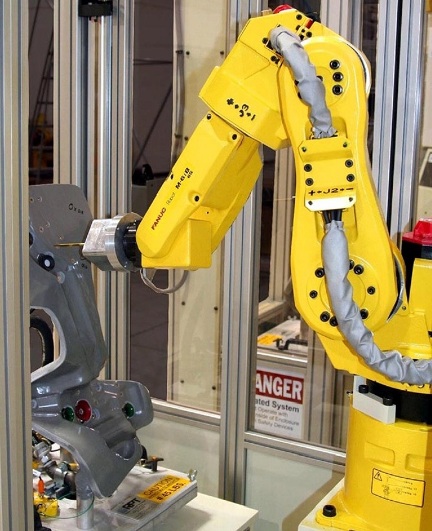
ಎಡ್ಜಿಂಗ್, ಡ್ರಿಲ್ಲಿಂಗ್ ಮತ್ತು ಮಿಲ್ಲಿಂಗ್ - ರೋಬೋಟ್ಗೆ ಯಾವುದು ಸುಲಭವಾಗಬಹುದು, ಅದು ಲೋಹ, ಮರ ಅಥವಾ ಪ್ಲಾಸ್ಟಿಕ್ ಆಗಿರಬಹುದು. ನಿಖರವಾದ ಮತ್ತು ಬಾಳಿಕೆ ಬರುವ ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ಗಳು ಈ ಕಾರ್ಯಗಳನ್ನು ಬ್ಯಾಂಗ್ನೊಂದಿಗೆ ನಿರ್ವಹಿಸುತ್ತಾರೆ. ಕೆಲಸದ ಪ್ರದೇಶವು ಸೀಮಿತವಾಗಿಲ್ಲ, ವಿಸ್ತೃತ ಅಕ್ಷ ಅಥವಾ ಹಲವಾರು ನಿಯಂತ್ರಿತ ಅಕ್ಷಗಳನ್ನು ಸ್ಥಾಪಿಸಲು ಸಾಕು, ಇದು ಅತ್ಯುತ್ತಮ ನಮ್ಯತೆ ಮತ್ತು ಹೆಚ್ಚಿನ ವೇಗವನ್ನು ನೀಡುತ್ತದೆ. ಒಬ್ಬರು ಇದನ್ನು ಮಾಡಲು ಸಾಧ್ಯವಿಲ್ಲ.
ಮಿಲ್ಲಿಂಗ್ ಉಪಕರಣದ ತಿರುಗುವಿಕೆಯ ಆವರ್ತನಗಳು ನಿಮಿಷಕ್ಕೆ ಹತ್ತು ಸಾವಿರ ಕ್ರಾಂತಿಗಳನ್ನು ತಲುಪುತ್ತವೆ, ಮತ್ತು ಸ್ತರಗಳ ಗ್ರೈಂಡಿಂಗ್ ಸಂಪೂರ್ಣವಾಗಿ ಸರಳ ಪುನರಾವರ್ತಿತ ಚಲನೆಗಳ ಸರಣಿಯಾಗಿ ರೂಪಾಂತರಗೊಳ್ಳುತ್ತದೆ. ಆದರೆ ಹಿಂದೆ, ಮರಳು ಮತ್ತು ಅಪಘರ್ಷಕ ಮೇಲ್ಮೈ ಚಿಕಿತ್ಸೆಯನ್ನು ಕೊಳಕು ಮತ್ತು ಭಾರವಾದ ಮತ್ತು ತುಂಬಾ ಹಾನಿಕಾರಕವೆಂದು ಪರಿಗಣಿಸಲಾಗಿತ್ತು. ಅಪಘರ್ಷಕ ಬೆಲ್ಟ್ ಅನ್ನು ಹಾದುಹೋದ ನಂತರ ಭಾವಿಸಿದ ಚಕ್ರ ಸಂಸ್ಕರಣೆಯ ಸಮಯದಲ್ಲಿ ಪೇಸ್ಟ್ ಅನ್ನು ಈಗ ಸ್ವಯಂಚಾಲಿತವಾಗಿ ನೀಡಲಾಗುತ್ತದೆ. ಆಪರೇಟರ್ಗೆ ವೇಗವಾಗಿ ಮತ್ತು ಸುರಕ್ಷಿತವಾಗಿದೆ.
ಕೈಗಾರಿಕಾ ರೊಬೊಟಿಕ್ಸ್ನ ನಿರೀಕ್ಷೆಗಳು ಅಗಾಧವಾಗಿವೆ, ಏಕೆಂದರೆ ರೋಬೋಟ್ಗಳನ್ನು ಮೂಲಭೂತವಾಗಿ ಯಾವುದೇ ಉತ್ಪಾದನಾ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಮತ್ತು ಅನಿಯಮಿತ ಪ್ರಮಾಣದಲ್ಲಿ ಪರಿಚಯಿಸಬಹುದು.ಸ್ವಯಂಚಾಲಿತ ಕೆಲಸದ ಗುಣಮಟ್ಟವು ಕೆಲವೊಮ್ಮೆ ತುಂಬಾ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ, ಅದು ಮಾನವ ಕೈಗಳಿಗೆ ಸರಳವಾಗಿ ಸಾಧಿಸಲಾಗುವುದಿಲ್ಲ. ದೋಷಗಳು ಮತ್ತು ತಪ್ಪುಗಳು ಸ್ವೀಕಾರಾರ್ಹವಲ್ಲದ ಸಂಪೂರ್ಣ ದೊಡ್ಡ ಕೈಗಾರಿಕೆಗಳಿವೆ: ವಿಮಾನ ತಯಾರಿಕೆ, ನಿಖರವಾದ ವೈದ್ಯಕೀಯ ಉಪಕರಣಗಳು, ಅಲ್ಟ್ರಾ-ನಿಖರವಾದ ಶಸ್ತ್ರಾಸ್ತ್ರಗಳು, ಇತ್ಯಾದಿ. ವೈಯಕ್ತಿಕ ಉದ್ಯಮಗಳ ಸ್ಪರ್ಧಾತ್ಮಕತೆಯ ಹೆಚ್ಚಳ ಮತ್ತು ಅವರ ಆರ್ಥಿಕತೆಯ ಮೇಲೆ ಧನಾತ್ಮಕ ಪರಿಣಾಮವನ್ನು ನಮೂದಿಸಬಾರದು.