ವೇಗದ ಕಾರ್ಯವಾಗಿ ಮೋಟಾರ್ ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ಗಳು
 ಮೋಟಾರು ನಿಯಂತ್ರಣದಲ್ಲಿ, ಮೋಟಾರು ರೋಟರ್ ವೇಗದ ಕಾರ್ಯವಾಗಿ ವೇಗವನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡಲಾಗುತ್ತದೆ, ಅದು ಬದಲಾಗುತ್ತಿರುವಾಗ ಅನುಗುಣವಾದ ನಿಯಂತ್ರಣ ಅಂಶಗಳ ಮೇಲೆ ಪ್ರಭಾವ ಬೀರುತ್ತದೆ.
ಮೋಟಾರು ನಿಯಂತ್ರಣದಲ್ಲಿ, ಮೋಟಾರು ರೋಟರ್ ವೇಗದ ಕಾರ್ಯವಾಗಿ ವೇಗವನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡಲಾಗುತ್ತದೆ, ಅದು ಬದಲಾಗುತ್ತಿರುವಾಗ ಅನುಗುಣವಾದ ನಿಯಂತ್ರಣ ಅಂಶಗಳ ಮೇಲೆ ಪ್ರಭಾವ ಬೀರುತ್ತದೆ.
ಮೋಟಾರ್ ಸ್ಟಾರ್ಟಿಂಗ್ ಕಂಟ್ರೋಲ್ ಸರ್ಕ್ಯೂಟ್ಗಳಲ್ಲಿ ಸ್ಪೀಡ್ ಕಂಟ್ರೋಲ್ ರಿಲೇಗಳು ಅಥವಾ ಸಣ್ಣ ಅಳತೆಯ ಎಲೆಕ್ಟ್ರಿಕ್ ಜನರೇಟರ್ಗಳನ್ನು ಬಳಸಬಹುದು. ಆದಾಗ್ಯೂ, ವಿನ್ಯಾಸದ ಸಂಕೀರ್ಣತೆ, ಹೆಚ್ಚಿನ ವೆಚ್ಚ ಮತ್ತು ಸಾಕಷ್ಟು ವಿಶ್ವಾಸಾರ್ಹತೆಯಿಂದಾಗಿ ಈ ಉದ್ದೇಶಗಳಿಗಾಗಿ ಅವುಗಳನ್ನು ಅತ್ಯಂತ ವಿರಳವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಆದ್ದರಿಂದ, ಎಂಜಿನ್ ವೇಗವನ್ನು ಪರೋಕ್ಷ ವಿಧಾನಗಳಿಂದ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ. ಅಸಮಕಾಲಿಕ ಮತ್ತು ಸಿಂಕ್ರೊನಸ್ ಮೋಟರ್ಗಳಲ್ಲಿ, ತಿರುಗುವಿಕೆಯ ಆವರ್ತನವನ್ನು ರೋಟರ್ ಪ್ರವಾಹದ ಇಎಮ್ಎಫ್ ಮತ್ತು ಆವರ್ತನದಿಂದ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ನೇರ ಪ್ರವಾಹದ ಮೋಟಾರ್ಗಳಲ್ಲಿ ಆರ್ಮೇಚರ್ ಇಎಮ್ಎಫ್ನಿಂದ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ.
ಅಂಜೂರದಲ್ಲಿ. 1, a ಮತ್ತು b ತಿರುಗುವಿಕೆಯ ಆವರ್ತನವನ್ನು ಅವಲಂಬಿಸಿ ಮತ್ತು ಪ್ರಾರಂಭದ ಸಮಯದಿಂದ EMF ಮತ್ತು ಆರ್ಮೇಚರ್ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಅವಲಂಬಿಸಿ ಸಮಾನಾಂತರ-ಪ್ರಚೋದಿತ DC ಮೋಟರ್ನ ಸ್ವಯಂಚಾಲಿತ ಪ್ರಾರಂಭಕ್ಕಾಗಿ ಯೋಜನೆಗಳನ್ನು ತೋರಿಸುತ್ತದೆ. ತಿರುಗುವಿಕೆಯ ಆವರ್ತನದ ನಿಯಂತ್ರಣವನ್ನು ಮೋಟರ್ನ ಇಎಮ್ಎಫ್ ಅನ್ನು ಅಳೆಯುವ ಮೂಲಕ ನಡೆಸಲಾಗುತ್ತದೆ, ಇದು ತಿರುಗುವಿಕೆಯ ಆವರ್ತನಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಬದಲಾಗುತ್ತದೆ.
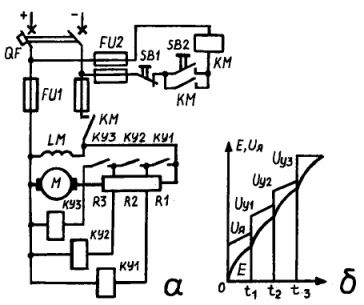
ಅಕ್ಕಿ. 1.ವೇಗದ ಕಾರ್ಯವಾಗಿ ಕಂಟ್ರೋಲ್ ಸರ್ಕ್ಯೂಟ್ಗಳು: a ಮತ್ತು b — ಸರ್ಕ್ಯೂಟ್ ಮತ್ತು ಸಮಾನಾಂತರ-ಪ್ರಚೋದಿತ DC ಮೋಟರ್ನ ಆರಂಭಿಕ ರೇಖಾಚಿತ್ರ
EMF ಎಂಜಿನ್ ವೇಗಕ್ಕೆ ಅನುಗುಣವಾಗಿರುವುದರಿಂದ, ಆರಂಭಿಕ ರಿಯೊಸ್ಟಾಟ್ನ ಪ್ರತ್ಯೇಕ ಹಂತಗಳ ಸ್ವಯಂಚಾಲಿತ ಇನ್ಪುಟ್ ಅನ್ನು ವೇಗವರ್ಧಕ ಸಂಪರ್ಕಗಳಾದ KM1, KM2 ಮತ್ತು KMZ ಗಳ ವೋಲ್ಟೇಜ್ನ ನಿರ್ದಿಷ್ಟ ಪ್ರಮಾಣದಲ್ಲಿ ನಡೆಸಲಾಗುತ್ತದೆ, ಪ್ರತಿಯೊಂದೂ ನಿರ್ದಿಷ್ಟ ಹಿಂತೆಗೆದುಕೊಳ್ಳುವಿಕೆಗೆ ಹೊಂದಿಸಲಾಗಿದೆ. ಮೌಲ್ಯ. ಸ್ಟಾರ್ಟರ್ ಅನ್ನು ಒತ್ತುವ ಮೂಲಕ ಗುಂಡಿಗಳು SB2 KM ಲೈನ್ ಕಾಂಟ್ಯಾಕ್ಟರ್ ಅನ್ನು ಆನ್ ಮಾಡುತ್ತದೆ. ಎಲ್ಲಾ ಪ್ರತಿರೋಧಗಳು R1, R2, R3 ಅನ್ನು ಆರ್ಮೇಚರ್ ವಿಂಡಿಂಗ್ನೊಂದಿಗೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಪ್ರಸ್ತುತವನ್ನು ಮಿತಿಗೊಳಿಸುತ್ತದೆ.
ಒಂದು ನಿರ್ದಿಷ್ಟ ವೇಗದಲ್ಲಿ n1, ಕಾಂಟ್ಯಾಕ್ಟರ್ K1 ನ ಸುರುಳಿಯ ವೋಲ್ಟೇಜ್ Uy1 ಆಗಿದೆ

ಇಲ್ಲಿ ಇದು ಯಂತ್ರದ ಗುಣಾಂಕವಾಗಿದೆ.
Uy1 ಪುಲ್-ಡೌನ್ ವೋಲ್ಟೇಜ್ಗೆ ಸಮಾನವಾದಾಗ, ಸಂಪರ್ಕಕಾರ KM1 ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ ಮತ್ತು ಪ್ರತಿರೋಧ R1 ಅನ್ನು ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಮಾಡುತ್ತದೆ. n2 ಮತ್ತು n3 ತಿರುಗುವವರೆಗೆ ತಿರುಗುವಿಕೆಯ ವೇಗದಲ್ಲಿ ಮತ್ತಷ್ಟು ಹೆಚ್ಚಳವು ಸಂಪರ್ಕಕಾರರ K2 ಸುರುಳಿಗಳ ಮೇಲಿನ ವೋಲ್ಟೇಜ್ ಹೆಚ್ಚಳಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ ಮತ್ತು ಮೌಲ್ಯಗಳಿಗೆ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್


ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಸಂಪರ್ಕಕಾರರು K2 ಮತ್ತು ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ ಸರಣಿಯಲ್ಲಿ ಕೆಲಸ ಮಾಡುತ್ತದೆ ಮತ್ತು ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ ಪ್ರತಿರೋಧಗಳು R2 ಮತ್ತು R3. ಪ್ರತಿರೋಧ R3 ಅನ್ನು ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಮಾಡಿದ ನಂತರ, ಆರಂಭಿಕ ಪ್ರಕ್ರಿಯೆಯು ಪೂರ್ಣಗೊಳ್ಳುತ್ತದೆ ಮತ್ತು ಮೋಟಾರು ದೀರ್ಘಕಾಲದವರೆಗೆ ಚಲಿಸಬಹುದು.
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ EMF ಸ್ಲಿಪ್ಗೆ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ, ಅಂದರೆ E2s = E2s. ಇಲ್ಲಿ E2 ಸ್ಥಾಯಿ ರೋಟರ್ನ emf ಆಗಿದೆ.
ಕಡಿಮೆ ಸ್ಲಿಪ್, ಕಡಿಮೆ ಇಎಮ್ಎಫ್, ಅಂದರೆ, ಮೋಟಾರ್ ರೋಟರ್ ವೇಗವು ಹೆಚ್ಚಾಗುತ್ತದೆ. ಗಾಯದ ರೋಟರ್ನೊಂದಿಗೆ ಎಸಿ ಮೋಟಾರ್ಗಳ ಪ್ರಾರಂಭವನ್ನು ನಿಯಂತ್ರಿಸಲು, ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಇಎಮ್ಎಫ್ನ ಮೌಲ್ಯವನ್ನು ನಿಯಂತ್ರಿಸುವ ರಿಲೇಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಆರಂಭದ ಪ್ರತಿರೋಧಗಳನ್ನು ಈ ವೋಲ್ಟೇಜ್ಗಳಿಗೆ ಸರಿಹೊಂದಿಸುವ ಅನುಗುಣವಾದ ಸಾಧನಗಳು (ರಿಲೇಗಳು, ಸಂಪರ್ಕಕಾರರು).
ಗಾಯದ-ರೋಟರ್ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ಗಳು ಮತ್ತು ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್ಗಳ ನಿಯಂತ್ರಣಕ್ಕಾಗಿ, ಆವರ್ತನ ವಿಧಾನವನ್ನು ವೇಗದ ಕಾರ್ಯವಾಗಿಯೂ ಬಳಸಬಹುದು. ಈ ವಿಧಾನವು ಸ್ಟೇಟರ್ ಫೀಲ್ಡ್ n0 ಮತ್ತು ರೋಟರ್ n2 ರ ಆವರ್ತನದ ಆವರ್ತನದ ಮೇಲೆ ರೋಟರ್ ಕರೆಂಟ್ f2 ಆವರ್ತನದ ತಿಳಿದಿರುವ ಅವಲಂಬನೆಯನ್ನು ಆಧರಿಸಿದೆ, ಅಂದರೆ.
ಪ್ರತಿ ರೋಟರ್ ವೇಗವು ನಿರ್ದಿಷ್ಟ ಎಫ್ 2 ಮೌಲ್ಯಕ್ಕೆ ಅನುಗುಣವಾಗಿರುವುದರಿಂದ, ಆ ಆವರ್ತನಕ್ಕೆ ಹೊಂದಿಸಲಾದ ರಿಲೇ ಮತ್ತು ಮೋಟರ್ ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ಗೆ ಸಂಪರ್ಕಪಡಿಸಲಾಗುತ್ತದೆ ಕಾಂಟ್ಯಾಕ್ಟರ್ ಕಾಯಿಲ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಕಾಂಟ್ಯಾಕ್ಟರ್ ನಿರ್ದಿಷ್ಟ ವೇಗದಲ್ಲಿ ಪ್ರತಿರೋಧ ಹಂತಗಳನ್ನು ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ ಮಾಡುತ್ತದೆ.
ಎದುರಾಳಿ ಮೋಟರ್ಗಳಿಂದ ಬ್ರೇಕಿಂಗ್ ವೇಗವನ್ನು ಅವಲಂಬಿಸಿ ಮಾಡಲಾಗುತ್ತದೆ ವೇಗ ನಿಯಂತ್ರಣ ರಿಲೇ SR. ಚಿತ್ರ 2 ರಲ್ಲಿ, a, b ವಿರೋಧದಿಂದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳನ್ನು ನಿಲ್ಲಿಸುವ ಉದಾಹರಣೆಗಳನ್ನು ತೋರಿಸುತ್ತದೆ.
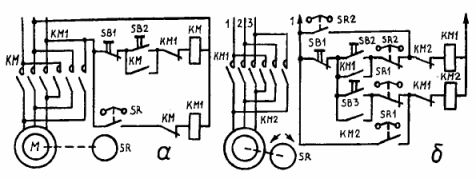
ಅಕ್ಕಿ. 2. ವಿರೋಧದ ಮೂಲಕ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳನ್ನು ನಿಲ್ಲಿಸುವ ಯೋಜನೆಗಳು: a - ರಿವರ್ಸಿಬಲ್ ಅಲ್ಲ; ಬಿ - ಹಿಂತಿರುಗಿಸಬಹುದಾದ
ಈ ಯೋಜನೆಗಳು ಹೇಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ ಎಂಬುದನ್ನು ನೋಡೋಣ.
SB2 ಗುಂಡಿಯನ್ನು ಒತ್ತುವುದರಿಂದ ಸಂಪರ್ಕಕಾರ KM ನ ಸುರುಳಿಯನ್ನು ಆನ್ ಮಾಡುತ್ತದೆ (Fig. 2, a ನೋಡಿ), ಇದು ವಿದ್ಯುತ್ ಸಂಪರ್ಕಗಳನ್ನು ಮುಚ್ಚುತ್ತದೆ ಮತ್ತು SB2 ಬಟನ್ ಅನ್ನು ನಿರ್ಬಂಧಿಸುತ್ತದೆ. ಅದೇ ಸಮಯದಲ್ಲಿ, ಬ್ರೇಕ್ ಕಾಂಟಕ್ಟರ್ KM1 ಮತ್ತು ವೇಗ ನಿಯಂತ್ರಣ ರಿಲೇ SR ನ ಸುರುಳಿಯ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಆರಂಭಿಕ ಬ್ಲಾಕ್ KM ನ ಸಂಪರ್ಕವು ಅವುಗಳನ್ನು ನೆಟ್ವರ್ಕ್ನಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸುತ್ತದೆ. ಮೋಟಾರ್ ರೋಟರ್ ಒಂದು ನಿರ್ದಿಷ್ಟ ವೇಗವನ್ನು ತಲುಪಿದಾಗ, SR ಸಂಪರ್ಕವು ಮುಚ್ಚಲ್ಪಡುತ್ತದೆ, ಆದರೆ ಇದು ಇನ್ನು ಮುಂದೆ KM1 ಸಂಪರ್ಕಕಾರಕ ಕಾರ್ಯನಿರ್ವಹಿಸಲು ಕಾರಣವಾಗುವುದಿಲ್ಲ. ಎಂಜಿನ್ ಸಾಮಾನ್ಯವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವುದನ್ನು ಮುಂದುವರಿಸುತ್ತದೆ.
ಕೌಂಟರ್-ಸ್ವಿಚಿಂಗ್ ಬ್ರೇಕ್ನೊಂದಿಗೆ ಮೋಟಾರ್ ಅನ್ನು ನಿಲ್ಲಿಸುವುದು SB ಗುಂಡಿಯನ್ನು ಒತ್ತುವ ಮೂಲಕ ಮಾಡಲಾಗುತ್ತದೆ.ಅದೇ ಸಮಯದಲ್ಲಿ, ಕಾಂಟ್ಯಾಕ್ಟರ್ KM ನ ಕಾಯಿಲ್ ಅನ್ನು ತಟಸ್ಥಗೊಳಿಸಲಾಗುತ್ತದೆ, ಮತ್ತು ಅದರ ಮುಖ್ಯ ಸಂಪರ್ಕಗಳು ಕಣ್ಮರೆಯಾಗುತ್ತವೆ ಮತ್ತು ನೆಟ್ವರ್ಕ್ನಿಂದ ಮೋಟರ್ ಅನ್ನು ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸುತ್ತವೆ. KM1 ನ ಬ್ರೇಕ್ ಕಾಂಟಕ್ಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ KM ತೆರೆಯುವ ಸಂಪರ್ಕವು ಮುಚ್ಚಲ್ಪಡುತ್ತದೆ. ಈ ಕ್ಷಣದಲ್ಲಿ ಸ್ಪೀಡ್ ಕಂಟ್ರೋಲ್ ರಿಲೇ SR ನ ಸಂಪರ್ಕವನ್ನು ಮುಚ್ಚಲಾಗಿದೆ, ಬ್ರೇಕ್ ಕಾಂಟಕ್ಟರ್ನ ಮುಖ್ಯ ಸಂಪರ್ಕಗಳನ್ನು ತಕ್ಷಣವೇ ಆನ್ ಮಾಡಲಾಗುತ್ತದೆ ಮತ್ತು ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ರಿವರ್ಸ್ಗೆ ಬದಲಾಯಿಸಲಾಗುತ್ತದೆ, ಕಾಂತೀಯ ಕ್ಷೇತ್ರವು ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ, ಅಂದರೆ. ಕೌಂಟರ್ ಸ್ವಿಚಿಂಗ್ ಮೂಲಕ ರೋಟರ್ ಮತ್ತು ಮೋಟರ್ನ ತಿರುಗುವಿಕೆಯನ್ನು ನಿಲ್ಲಿಸಲಾಗುತ್ತದೆ. ರೋಟರ್ನ ವೇಗವು ಕಡಿಮೆಯಾಗುತ್ತದೆ ಮತ್ತು ನಿರ್ದಿಷ್ಟ ಸಣ್ಣ ಮೌಲ್ಯದಲ್ಲಿ ಅದರ RKS ಸ್ಪೀಡ್ ಕಂಟ್ರೋಲ್ ರಿಲೇ ಸಂಪರ್ಕಗಳು ಮುಖ್ಯದಿಂದ ಮೋಟಾರ್ ಅನ್ನು ತೆರೆಯುತ್ತದೆ ಮತ್ತು ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸುತ್ತದೆ.
ವಿರುದ್ಧವಾದ ಬ್ರೇಕಿಂಗ್ (Fig. 2, b) ನೊಂದಿಗೆ ಹಿಮ್ಮುಖ ನಿಯಂತ್ರಣದ ಸಂದರ್ಭದಲ್ಲಿ, SB1 ಬಟನ್ ಅನ್ನು ಒತ್ತುವ ಮೂಲಕ ಮೋಟಾರ್ ಅನ್ನು ಮುಂದಕ್ಕೆ ಪ್ರಾರಂಭಿಸಲಾಗುತ್ತದೆ, ಇದು ಕಾಂಟ್ಯಾಕ್ಟರ್ KM1 ನ ಸುರುಳಿಯ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಮುಚ್ಚುವ ಮೂಲಕ ಮೋಟಾರ್ ಅನ್ನು ಸಂಪರ್ಕಿಸಲಾಗಿದೆ ಎಂದು ಖಚಿತಪಡಿಸುತ್ತದೆ. ಜಾಲಬಂಧ. ಮೋಟಾರ್ ರೋಟರ್ ತಿರುಗಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ ಮತ್ತು ಅದು ನಿರ್ದಿಷ್ಟ ವೇಗವನ್ನು ತಲುಪಿದಾಗ, ವೇಗ ನಿಯಂತ್ರಣ ರಿಲೇಯ ಮುಚ್ಚುವ ಸಂಪರ್ಕ SR1 ಮುಚ್ಚುತ್ತದೆ ಮತ್ತು ಆರಂಭಿಕ ಸಂಪರ್ಕ SR2 ತೆರೆಯುತ್ತದೆ.
ಕಾಂಟ್ಯಾಕ್ಟರ್ KM2 ನ ಕಾಯಿಲ್ ಅನ್ನು ಬದಲಾಯಿಸುವುದು ಸಂಭವಿಸುವುದಿಲ್ಲ ಏಕೆಂದರೆ ಸಂಪರ್ಕಕಾರ KM1 ನ ಆರಂಭಿಕ ಸಂಪರ್ಕವು ಅದರ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಮುರಿದಿದೆ. ಈ ಸ್ಥಾನದಲ್ಲಿ, SB ಗುಂಡಿಯನ್ನು ಒತ್ತುವವರೆಗೂ ಮೋಟಾರ್ ಚಾಲನೆಯಲ್ಲಿ ಮುಂದುವರಿಯುತ್ತದೆ. SB ಗುಂಡಿಯನ್ನು ಒತ್ತಿದಾಗ, ಕಾಯಿಲ್ KM1 ರ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಆಫ್ ಮಾಡಲಾಗಿದೆ. ಇದು ಬ್ರೇಕ್ ಸಂಪರ್ಕ KM1 ಅನ್ನು ಮುಚ್ಚುತ್ತದೆ ಮತ್ತು ಕಾಂಟ್ಯಾಕ್ಟರ್ KM2 ನ ಕಾಯಿಲ್ ಸರ್ಕ್ಯೂಟ್ ವಿದ್ಯುತ್ ಪಡೆಯುತ್ತದೆ.
ಮೋಟಾರ್ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ರಿವರ್ಸ್ ಮಾಡಲು ತೊಡಗುತ್ತದೆ. ರೋಟರ್ ಜಡತ್ವದಿಂದ ಅದೇ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗುವುದನ್ನು ಮುಂದುವರೆಸಿದಾಗ, ವಿರೋಧ ಬ್ರೇಕಿಂಗ್ ಸಂಭವಿಸುತ್ತದೆ.ವೇಗವು ನಿರ್ದಿಷ್ಟ ಸಣ್ಣ ಮೌಲ್ಯಕ್ಕೆ ಕಡಿಮೆಯಾದಾಗ, ವೇಗ ನಿಯಂತ್ರಣ ರಿಲೇ ಅದರ ಸಂಪರ್ಕ SR1 ಅನ್ನು ತೆರೆಯುತ್ತದೆ, ಸಂಪರ್ಕಕಾರ KM2 ಆಫ್ ಮಾಡುತ್ತದೆ ಮತ್ತು ನೆಟ್ವರ್ಕ್ನಿಂದ ಮೋಟರ್ ಅನ್ನು ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸುತ್ತದೆ.
ಎಂಜಿನ್ ಅನ್ನು ಹಿಮ್ಮುಖವಾಗಿ ಪ್ರಾರಂಭಿಸಲು, SB2 ಬಟನ್ ಒತ್ತಿರಿ. ಇಡೀ ಪ್ರಕ್ರಿಯೆಯು ವಿವರಿಸಿದಂತೆಯೇ ಇರುತ್ತದೆ. ಈಗ ಬ್ರೇಕ್ ಕಾಂಟ್ಯಾಕ್ಟರ್ನ ಪಾತ್ರವನ್ನು KM1 ಸಂಪರ್ಕಕಾರರಿಂದ ಆಡಲಾಗುತ್ತದೆ, ಮತ್ತು ವೇಗ ನಿಯಂತ್ರಣ ರಿಲೇಯ SR2 ಸಂಪರ್ಕಗಳು ಬ್ರೇಕಿಂಗ್ ಪ್ರಕ್ರಿಯೆಯನ್ನು ನಿಯಂತ್ರಿಸುತ್ತದೆ.
ಸಿಂಕ್ರೊನಸ್ ಮೋಟರ್ನ ಸ್ವಯಂಚಾಲಿತ ಪ್ರಾರಂಭವು ಪ್ರಸಿದ್ಧ ತೊಂದರೆಗಳೊಂದಿಗೆ ಸಂಬಂಧಿಸಿದೆ, ಏಕೆಂದರೆ ಈ ಸಂದರ್ಭದಲ್ಲಿ ಆರಂಭಿಕ ಪ್ರವಾಹವನ್ನು ಮಿತಿಗೊಳಿಸಲು ಮಾತ್ರವಲ್ಲದೆ ನೆಟ್ವರ್ಕ್ನೊಂದಿಗೆ ಯಂತ್ರವನ್ನು ಸಿಂಕ್ರೊನೈಸ್ ಮಾಡಲು ಸಹ ಅಗತ್ಯವಾಗಿರುತ್ತದೆ.
ಕಡಿಮೆ ಶಕ್ತಿಯ ಸಿಂಕ್ರೊನಸ್ ಮೋಟರ್ಗಾಗಿ ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 3. ಇನ್ರಶ್ ಪ್ರಸ್ತುತ ಮಿತಿಯನ್ನು ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನಲ್ಲಿ ಸೇರಿಸಲಾದ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧಗಳಿಂದ ಒದಗಿಸಲಾಗುತ್ತದೆ. ಎಂಜಿನ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವ ಮೊದಲು, AC ಮತ್ತು DC ಮುಖ್ಯಗಳ ಸ್ವಯಂಚಾಲಿತ ಇನ್ಪುಟ್ ಸ್ವಿಚ್ಗಳು QF ಮತ್ತು QF1 ಅನ್ನು ಆನ್ ಮಾಡಿ, ಇದು ಗರಿಷ್ಠ ಮತ್ತು ಉಷ್ಣ ರಕ್ಷಣೆಯನ್ನು ಒದಗಿಸುತ್ತದೆ. ಪ್ರಾರಂಭ ಬಟನ್ SB2 ಅನ್ನು ಒತ್ತುವ ಮೂಲಕ, ಸಂಪರ್ಕಕಾರ KM ನ ಕಾಯಿಲ್ ಅನ್ನು ಆನ್ ಮಾಡಲಾಗಿದೆ, ಮತ್ತು KM ನ ಮುಖ್ಯ ಸಂಪರ್ಕಗಳ ಮೂಲಕ ಸಿಂಕ್ರೊನಸ್ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ಆರಂಭಿಕ ಪ್ರತಿರೋಧಕಗಳು Rn ಮೂಲಕ ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ. ಕಾಯಿಲ್ ಸ್ವಯಂ-ಲಾಕಿಂಗ್ ಆಗಿದೆ ಮತ್ತು ಡಿಸಿ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಅದರ ಸಂಪರ್ಕವು ಲಾಕಿಂಗ್ ರಿಲೇ ಕೆವಿ ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಅದರ ಮುಚ್ಚುವ ಸಂಪರ್ಕವು ಮುಚ್ಚುವುದು, ಸ್ವಿಚ್ ಆನ್ ಮಾಡಲು ಕಾಂಟ್ಯಾಕ್ಟರ್ಸ್ ಕೆ 1 ಮತ್ತು ಕೆ 2 ಗಳ ಸುರುಳಿಗಳನ್ನು ಸಿದ್ಧಪಡಿಸುತ್ತದೆ.
LM ರೋಟರ್ನ ಪ್ರಚೋದನೆಯ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಆವರ್ತನ ಪ್ರಸಾರಗಳು KF1 ಮತ್ತು KF2 ಎಂಜಿನ್ ವೇಗವನ್ನು ಅವಲಂಬಿಸಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ.ಪ್ರಾರಂಭದಲ್ಲಿ, ರೋಟರ್ ಸ್ಲಿಪ್ ಉತ್ತಮವಾದಾಗ, ರಿಲೇಗಳು KF1 ಮತ್ತು KF2 ನ ಬ್ರೇಕಿಂಗ್ ಸಂಪರ್ಕಗಳು ತೆರೆದುಕೊಳ್ಳುತ್ತವೆ.KV ನಿರ್ಬಂಧಿಸುವ ರಿಲೇ ಆನ್ ಆಗುವ ಮೊದಲು ಸುರುಳಿಗಳ ತೆರೆಯುವಿಕೆ ಸಂಭವಿಸುತ್ತದೆ ಮತ್ತು K1 ಸುರುಳಿಯು ಶಕ್ತಿಯನ್ನು ಪಡೆಯುವುದಿಲ್ಲ. ರಿಲೇ ನಿಯಂತ್ರಣಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಎಂಜಿನ್ RPM ಸರಿಸುಮಾರು 60-95% ಸಿಂಕ್ರೊನಸ್ ಆಗಿ ತಲುಪಿದಾಗ ರಿಲೇ ಸಂಪರ್ಕಗಳು KF1 ಮತ್ತು KF2 ಮತ್ತೆ ಮುಚ್ಚಲ್ಪಡುತ್ತವೆ.
ರಿಲೇ KF1 ನ ಸಂಪರ್ಕಗಳನ್ನು ಮುಚ್ಚಿದ ನಂತರ, ಕಾಂಟ್ಯಾಕ್ಟರ್ K1 ನ ಕಾಯಿಲ್ ಆನ್ ಆಗುತ್ತದೆ, ಮುಖ್ಯ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ ಅದರ ಸಂಪರ್ಕಗಳು ಆರಂಭಿಕ ಪ್ರತಿರೋಧಕಗಳು Rp ಅನ್ನು ಶಾರ್ಟ್-ಸರ್ಕ್ಯೂಟ್ ಮಾಡುತ್ತದೆ ಮತ್ತು ಸ್ಟೇಟರ್ ಪೂರ್ಣ ಲೈನ್ ವೋಲ್ಟೇಜ್ಗೆ ಆನ್ ಆಗುತ್ತದೆ. ರಿಲೇ KF2 ನ ತೆರೆದ ಸಂಪರ್ಕಗಳನ್ನು ಮುಚ್ಚಿದಾಗ, ಸಂಪರ್ಕಕಾರ K2 ನ ಸುರುಳಿಯನ್ನು ಪೂರೈಸಲು ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ರಚಿಸಲಾಗುತ್ತದೆ, ಸಂಪರ್ಕಕಾರ K1 ನಿಂದ ಸ್ವತಂತ್ರವಾಗಿ, ಅದರ ಸಂಪರ್ಕವು ಸಿಂಕ್ರೊನಸ್ ವೇಗದ ಸರಿಸುಮಾರು 60% ವೇಗದಲ್ಲಿ ತೆರೆಯುತ್ತದೆ.
ಕಾಂಟಕ್ಟರ್ K2 ಎರಡು ವಿಂಡ್ಗಳನ್ನು ಹೊಂದಿದೆ: ಒಂದು ಮುಖ್ಯ, ಎಳೆಯುವ KM1 ಮತ್ತು ಎರಡನೇ ಅಂಕುಡೊಂಕಾದ KM2, ಲಾಕ್ ಅನ್ನು ಬಿಡುಗಡೆ ಮಾಡಲು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ, ಇದು ಸಂಪರ್ಕಗಾರನೊಂದಿಗೆ ಒದಗಿಸಲಾಗಿದೆ. ಟೇಕ್-ಅಪ್ ಕಾಯಿಲ್ KM1 ಅನ್ನು ಸ್ವಿಚ್ ಮಾಡಿದ ನಂತರ, ಮುಚ್ಚುವ ಸಂಪರ್ಕಗಳು K2 ಪ್ರಚೋದನೆಯ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಮುಚ್ಚುತ್ತವೆ, ಮತ್ತು ಆರಂಭಿಕ ಸಂಪರ್ಕಗಳು K2 ತೆರೆದುಕೊಳ್ಳುತ್ತವೆ, ಡಿಸ್ಚಾರ್ಜ್ ರೆಸಿಸ್ಟರ್ಗಳಾದ R1 ಮತ್ತು R2 ನಿಂದ ರೋಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸುತ್ತದೆ ಮತ್ತು ರೋಟರ್ ಅನ್ನು DC ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಿಸುತ್ತದೆ.
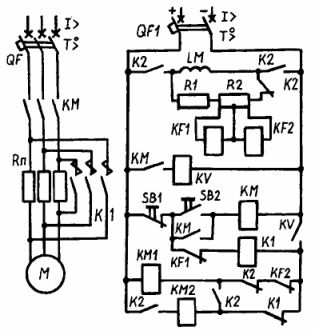
ಅಕ್ಕಿ. 3. ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್ ನಿಯಂತ್ರಣ ಯೋಜನೆ
ಸಂಪರ್ಕಕಾರ K2 ನ ಸಂಪರ್ಕಗಳು ಈ ಕೆಳಗಿನ ಕ್ರಮದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ. N / O ಸಂಪರ್ಕ K2 ಪಿಕಪ್ ಕಾಯಿಲ್ನ ಪೂರೈಕೆ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ತೆರೆಯುತ್ತದೆ, ಆದರೆ ನಿರ್ಬಂಧಿಸುವ ಕ್ರಿಯೆಯು ಸಂಪರ್ಕಕವನ್ನು ಶಕ್ತಿಯುತವಾಗಿರಿಸುತ್ತದೆ. ಮುಚ್ಚುವ ಸಂಪರ್ಕಗಳು ಕೆ 2 ಎರಡು ಸುರುಳಿಗಳ ಸರಬರಾಜು ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಮತ್ತು ಕಾಯಿಲ್ KM2 ನ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಮುಚ್ಚಿ, ನಂತರದ ಸ್ವಿಚಿಂಗ್ಗಾಗಿ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಸಿದ್ಧಪಡಿಸುತ್ತದೆ. ಕಾಯಿಲ್ KM2 ನಿಂದ ಲಾಕ್ ಮಾಡುವ ಕಾರ್ಯವಿಧಾನವನ್ನು ಬಿಡುಗಡೆ ಮಾಡಿದ ತಕ್ಷಣ ಕಾಯಿಲ್ K2 ಅನ್ನು ಡಿ-ಎನರ್ಜೈಸ್ ಮಾಡಲಾಗುತ್ತದೆ. SB1 ಗುಂಡಿಯನ್ನು ಒತ್ತುವ ಮೂಲಕ ಮೋಟಾರು ಮುಖ್ಯದಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಂಡಿದೆ.ಕಾಯಿಲ್ ಕೆ 1 ತನ್ನ ಆರಂಭಿಕ ಸಂಪರ್ಕವನ್ನು ಕಾಯಿಲ್ ಕೆಎಂ 2 ರ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಬಿಡುಗಡೆ ಮಾಡುತ್ತದೆ, ಇದು ತಾಳವನ್ನು ಬಿಡುಗಡೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ಕಾಯಿಲ್ ಕೆಎಂ 1 ಅನ್ನು ಆಫ್ ಮಾಡುತ್ತದೆ, ಅದರ ನಂತರ ಸರ್ಕ್ಯೂಟ್ ಅದರ ಮೂಲ ಸ್ಥಾನಕ್ಕೆ ಮರಳುತ್ತದೆ.