ವಿವಿಧ ವಿಧಾನಗಳು, ವೋಲ್ಟೇಜ್ಗಳು ಮತ್ತು ಆವರ್ತನಗಳಲ್ಲಿ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು
 ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು n = f (M) ಅಥವಾ n=e (I) ಎಂದು ವ್ಯಕ್ತಪಡಿಸಬಹುದು. ಆದಾಗ್ಯೂ, ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಅವಲಂಬನೆಯ ರೂಪದಲ್ಲಿ ವ್ಯಕ್ತಪಡಿಸಲಾಗುತ್ತದೆ M = f (S), ಅಲ್ಲಿ C - ಸ್ಲೈಡಿಂಗ್, S = (nc-n) / nc, ಅಲ್ಲಿ ns - ಸಿಂಕ್ರೊನಸ್ ವೇಗ.
ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು n = f (M) ಅಥವಾ n=e (I) ಎಂದು ವ್ಯಕ್ತಪಡಿಸಬಹುದು. ಆದಾಗ್ಯೂ, ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಅವಲಂಬನೆಯ ರೂಪದಲ್ಲಿ ವ್ಯಕ್ತಪಡಿಸಲಾಗುತ್ತದೆ M = f (S), ಅಲ್ಲಿ C - ಸ್ಲೈಡಿಂಗ್, S = (nc-n) / nc, ಅಲ್ಲಿ ns - ಸಿಂಕ್ರೊನಸ್ ವೇಗ.
ಪ್ರಾಯೋಗಿಕವಾಗಿ, ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳ ಚಿತ್ರಾತ್ಮಕ ನಿರ್ಮಾಣಕ್ಕಾಗಿ ಕ್ಲೋಸ್ ಸೂತ್ರ ಎಂಬ ಸರಳೀಕೃತ ಸೂತ್ರವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ:

ಇಲ್ಲಿ: Mk - ನಿರ್ಣಾಯಕ (ಗರಿಷ್ಠ) ಟಾರ್ಕ್ ಮೌಲ್ಯ. ಈ ಕ್ಷಣದ ಮೌಲ್ಯವು ನಿರ್ಣಾಯಕ ಸ್ಲಿಪ್ಗೆ ಅನುರೂಪವಾಗಿದೆ

ಅಲ್ಲಿ λm = Mk / Mn
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ ಬಳಸಿ ನಿರ್ವಹಿಸುವ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ಗೆ ಸಂಬಂಧಿಸಿದ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಲು ಕ್ಲೋಸ್ನ ಸೂತ್ರವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಕ್ಲೋಸ್ ಸೂತ್ರವನ್ನು ಬಳಸಿಕೊಂಡು, ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಪಾಸ್ಪೋರ್ಟ್ ಡೇಟಾದ ಪ್ರಕಾರ ನೀವು ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳ ಗ್ರಾಫ್ ಅನ್ನು ನಿರ್ಮಿಸಬಹುದು. ಪ್ರಾಯೋಗಿಕ ಲೆಕ್ಕಾಚಾರಗಳಿಗಾಗಿ, ರೂಟ್ ಮೊದಲು ನಿರ್ಣಾಯಕ ಕ್ಷಣವನ್ನು ನಿರ್ಧರಿಸುವಾಗ ಪ್ಲಸ್ ಚಿಹ್ನೆಯನ್ನು ಮಾತ್ರ ಸೂತ್ರದಲ್ಲಿ ಪರಿಗಣಿಸಬೇಕು.
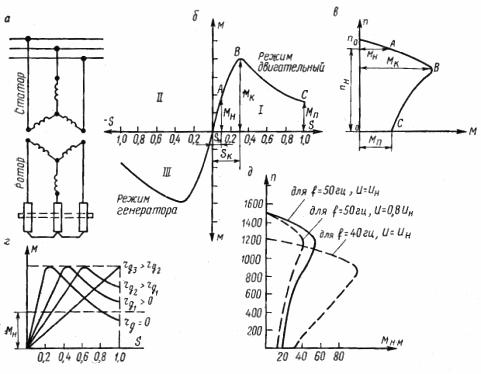
ಅಕ್ಕಿ. 1.ಅಸಮಕಾಲಿಕ ಮೋಟಾರು: a — ಸ್ಕೀಮ್ಯಾಟಿಕ್ ರೇಖಾಚಿತ್ರ, b — ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣ M = f (S) — ಮೋಟಾರ್ ಮತ್ತು ಜನರೇಟರ್ ವಿಧಾನಗಳಲ್ಲಿ ನೈಸರ್ಗಿಕ, c — ನೈಸರ್ಗಿಕ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣ n = f (M) ಮೋಟಾರು ಕ್ರಮದಲ್ಲಿ, d - ಕೃತಕ rheostat ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು , ಇ - ವಿವಿಧ ವೋಲ್ಟೇಜ್ಗಳು ಮತ್ತು ಆವರ್ತನಗಳಿಗೆ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು.

ಅಳಿಲು ಕೇಜ್ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್
ಅಂಜೂರದಿಂದ ನೋಡಬಹುದಾದಂತೆ. 1, I ಮತ್ತು III ಕ್ವಾಡ್ರಾಂಟ್ಗಳಲ್ಲಿ ಇರುವ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು. I ಚತುರ್ಭುಜದಲ್ಲಿ ವಕ್ರರೇಖೆಯ ಭಾಗವು ಧನಾತ್ಮಕ ಸ್ಲಿಪ್ ಮೌಲ್ಯಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ ಮತ್ತು ಅಸಮಕಾಲಿಕ ಮೋಟರ್ನ ಕಾರ್ಯಾಚರಣೆಯ ಮೋಡ್ ಅನ್ನು ನಿರೂಪಿಸುತ್ತದೆ, ಮತ್ತು III ಕ್ವಾಡ್ರಾಂಟ್ನಲ್ಲಿ, ಜನರೇಟರ್ ಮೋಡ್. ಎಂಜಿನ್ ಮೋಡ್ ಹೆಚ್ಚಿನ ಪ್ರಾಯೋಗಿಕ ಆಸಕ್ತಿಯನ್ನು ಹೊಂದಿದೆ.
ಮೋಟಾರ್ ಮೋಡ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳ ಗ್ರಾಫ್ ಮೂರು ವಿಶಿಷ್ಟ ಬಿಂದುಗಳನ್ನು ಒಳಗೊಂಡಿದೆ: A, B, C ಮತ್ತು ಷರತ್ತುಬದ್ಧವಾಗಿ ಎರಡು ವಿಭಾಗಗಳಾಗಿ ವಿಂಗಡಿಸಬಹುದು: OB ಮತ್ತು BC (Fig. 1, c).
ಪಾಯಿಂಟ್ A ಮೋಟಾರ್ನ ನಾಮಮಾತ್ರದ ಟಾರ್ಕ್ಗೆ ಅನುರೂಪವಾಗಿದೆ ಮತ್ತು Mn = 9.55•103•(Strn /nn) ಸೂತ್ರದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ
ಈ ಕ್ಷಣವು ಅನುರೂಪವಾಗಿದೆ ನಾಮಮಾತ್ರದ ಸ್ಲಿಪ್, ಇದು ಸಾಮಾನ್ಯ ಕೈಗಾರಿಕಾ ಅಪ್ಲಿಕೇಶನ್ನೊಂದಿಗೆ ಎಂಜಿನ್ಗಳಿಗೆ 1 ರಿಂದ 7% ವ್ಯಾಪ್ತಿಯಲ್ಲಿ ಮೌಲ್ಯವನ್ನು ಹೊಂದಿರುತ್ತದೆ, ಅಂದರೆ Sn = 1 - 7%. ಅದೇ ಸಮಯದಲ್ಲಿ, ಸಣ್ಣ ಎಂಜಿನ್ಗಳು ಹೆಚ್ಚು ಸ್ಲಿಪ್ ಹೊಂದಿರುತ್ತವೆ ಮತ್ತು ದೊಡ್ಡವುಗಳು ಕಡಿಮೆ.
ಶಾಕ್ ಲೋಡಿಂಗ್ಗಾಗಿ ಉದ್ದೇಶಿಸಲಾದ ಹೈ ಸ್ಲಿಪ್ ಮೋಟಾರ್ಗಳು Сn~ 15% ಅನ್ನು ಹೊಂದಿವೆ. ಇವುಗಳಲ್ಲಿ, ಉದಾಹರಣೆಗೆ, ಏಕ ಸರಣಿಯ AC ಮೋಟಾರ್ಗಳು ಸೇರಿವೆ.
ವಿಶಿಷ್ಟತೆಯ ಪಾಯಿಂಟ್ ಸಿ ಪ್ರಾರಂಭದಲ್ಲಿ ಮೋಟಾರ್ ಶಾಫ್ಟ್ನಲ್ಲಿ ಸಂಭವಿಸುವ ಆರಂಭಿಕ ಟಾರ್ಕ್ ಮೌಲ್ಯಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ. ಈ ಕ್ಷಣ Mp ಅನ್ನು ಆರಂಭಿಕ ಅಥವಾ ಪ್ರಾರಂಭ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಸ್ಲಿಪ್ ಏಕತೆಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ ಮತ್ತು ವೇಗವು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ. ಟಾರ್ಕ್ ಪ್ರಾರಂಭವಾಗುತ್ತಿದೆ ಉಲ್ಲೇಖಿತ ಕೋಷ್ಟಕದ ಡೇಟಾದಿಂದ ನಿರ್ಧರಿಸಲು ಸುಲಭವಾಗಿದೆ, ಇದು ಆರಂಭಿಕ ಟಾರ್ಕ್ನ ಅನುಪಾತವನ್ನು ನಾಮಮಾತ್ರ Mp / Mn ಗೆ ತೋರಿಸುತ್ತದೆ.
ವೋಲ್ಟೇಜ್ ಮತ್ತು ಪ್ರಸ್ತುತ ಆವರ್ತನದ ಸ್ಥಿರ ಮೌಲ್ಯಗಳಲ್ಲಿ ಆರಂಭಿಕ ಟಾರ್ಕ್ನ ಪ್ರಮಾಣವು ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಆರಂಭದಲ್ಲಿ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧವು ಹೆಚ್ಚಾದಂತೆ, ಆರಂಭಿಕ ಟಾರ್ಕ್ನ ಮೌಲ್ಯವು ಹೆಚ್ಚಾಗುತ್ತದೆ, ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧವು ಮೋಟರ್ನ ಒಟ್ಟು ಅನುಗಮನದ ಪ್ರತಿರೋಧಕ್ಕೆ ಸಮಾನವಾದಾಗ ಅದರ ಗರಿಷ್ಠ ಮಟ್ಟವನ್ನು ತಲುಪುತ್ತದೆ. ತರುವಾಯ, ರೋಟರ್ನ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧವು ಹೆಚ್ಚಾದಂತೆ, ಆರಂಭಿಕ ಟಾರ್ಕ್ನ ಮೌಲ್ಯವು ಕಡಿಮೆಯಾಗುತ್ತದೆ, ಮಿತಿಯಲ್ಲಿ ಶೂನ್ಯಕ್ಕೆ ಒಲವು ತೋರುತ್ತದೆ.
ಪಾಯಿಂಟ್ C (Fig. 1, b ಮತ್ತು c) n = 0 ರಿಂದ n = ns ವರೆಗಿನ ಕ್ರಾಂತಿಗಳ ಸಂಪೂರ್ಣ ಶ್ರೇಣಿಯಲ್ಲಿ ಎಂಜಿನ್ ಅನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಬಹುದಾದ ಗರಿಷ್ಠ ಕ್ಷಣಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ... ಈ ಕ್ಷಣವನ್ನು ನಿರ್ಣಾಯಕ (ಅಥವಾ ಉರುಳಿಸುವ) ಕ್ಷಣ Mk ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. . ನಿರ್ಣಾಯಕ ಕ್ಷಣವು ನಿರ್ಣಾಯಕ ಸ್ಲಿಪ್ Sk ಗೆ ಸಹ ಅನುರೂಪವಾಗಿದೆ. ನಿರ್ಣಾಯಕ ಸ್ಲಿಪ್ Sk ನ ಮೌಲ್ಯವು ಚಿಕ್ಕದಾಗಿದೆ, ಹಾಗೆಯೇ ನಾಮಮಾತ್ರದ ಸ್ಲಿಪ್ Сn ನ ಮೌಲ್ಯವು ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳ ಬಿಗಿತವನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ.
ಆರಂಭಿಕ ಮತ್ತು ನಿರ್ಣಾಯಕ ಕ್ಷಣಗಳನ್ನು ನಾಮಮಾತ್ರದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಅಳಿಲು-ಕೇಜ್ ಮೋಟಾರ್ ಎಲೆಕ್ಟ್ರಿಕ್ ಯಂತ್ರಗಳಿಗೆ GOST ಪ್ರಕಾರ, ಷರತ್ತು Mn / Mn = 0.9 - 1.2, Mk / Mn = 1.65 - 2.5 ಅನ್ನು ಪೂರೈಸಬೇಕು.
ನಿರ್ಣಾಯಕ ಕ್ಷಣದ ಮೌಲ್ಯವು ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧವನ್ನು ಅವಲಂಬಿಸಿಲ್ಲ ಎಂದು ಗಮನಿಸಬೇಕು, ಆದರೆ ನಿರ್ಣಾಯಕ ಸ್ಲಿಪ್ Сk ಈ ಪ್ರತಿರೋಧಕ್ಕೆ ನೇರವಾಗಿ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ.ಇದರರ್ಥ ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧದ ಹೆಚ್ಚಳದೊಂದಿಗೆ, ನಿರ್ಣಾಯಕ ಕ್ಷಣದ ಮೌಲ್ಯವು ಬದಲಾಗದೆ ಉಳಿಯುತ್ತದೆ, ಆದರೆ ಟಾರ್ಕ್ ಕರ್ವ್ನ ಗರಿಷ್ಠವು ಹೆಚ್ಚುತ್ತಿರುವ ಸ್ಲಿಪ್ ಮೌಲ್ಯಗಳಿಗೆ ಬದಲಾಗುತ್ತದೆ (ಚಿತ್ರ 1, ಡಿ).
ನಿರ್ಣಾಯಕ ಟಾರ್ಕ್ನ ಪ್ರಮಾಣವು ಸ್ಟೇಟರ್ಗೆ ಅನ್ವಯಿಸಲಾದ ವೋಲ್ಟೇಜ್ನ ಚೌಕಕ್ಕೆ ನೇರವಾಗಿ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ ಮತ್ತು ವೋಲ್ಟೇಜ್ಗಳ ಆವರ್ತನದ ವರ್ಗಕ್ಕೆ ಮತ್ತು ಸ್ಟೇಟರ್ನಲ್ಲಿನ ಪ್ರವಾಹದ ಆವರ್ತನಕ್ಕೆ ವಿಲೋಮ ಅನುಪಾತದಲ್ಲಿರುತ್ತದೆ.
ಉದಾಹರಣೆಗೆ, ಮೋಟಾರ್ಗೆ ಸರಬರಾಜು ಮಾಡಲಾದ ವೋಲ್ಟೇಜ್ ರೇಟ್ ಮಾಡಿದ ಮೌಲ್ಯದ 85% ಗೆ ಸಮನಾಗಿದ್ದರೆ, ನಿರ್ಣಾಯಕ ಟಾರ್ಕ್ನ ಪ್ರಮಾಣವು ರೇಟ್ ವೋಲ್ಟೇಜ್ನಲ್ಲಿ 0.852 = 0.7225 = 72.25% ನಿರ್ಣಾಯಕ ಟಾರ್ಕ್ ಆಗಿರುತ್ತದೆ.
ಆವರ್ತನವನ್ನು ಬದಲಾಯಿಸುವಾಗ ವಿರುದ್ಧವಾಗಿ ಗಮನಿಸಲಾಗಿದೆ. ಉದಾಹರಣೆಗೆ, = 60 Hz ನ ಪ್ರಸ್ತುತ ಆವರ್ತನದೊಂದಿಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸಲು ವಿನ್ಯಾಸಗೊಳಿಸಲಾದ ಮೋಟಾರ್ಗೆ, = 50 Hz ಆವರ್ತನದೊಂದಿಗೆ ಪೂರೈಕೆ ಪ್ರವಾಹ, ಆಗ ನಿರ್ಣಾಯಕ ಕ್ಷಣವು (60/50) 2=1.44 ಪಟ್ಟು ಹೆಚ್ಚು ಬರುತ್ತದೆ. ಅಧಿಕೃತ ಮೌಲ್ಯ ಅದರ ಆವರ್ತನ (ಚಿತ್ರ 1, ಇ).
ನಿರ್ಣಾಯಕ ಕ್ಷಣವು ಮೋಟಾರಿನ ತತ್ಕ್ಷಣದ ಓವರ್ಲೋಡ್ ಸಾಮರ್ಥ್ಯವನ್ನು ನಿರೂಪಿಸುತ್ತದೆ, ಅಂದರೆ, ಯಾವುದೇ ಹಾನಿಕಾರಕ ಪರಿಣಾಮಗಳಿಲ್ಲದೆ ಮೋಟಾರ್ ಯಾವ ಕ್ಷಣದಲ್ಲಿ (ಕೆಲವು ಸೆಕೆಂಡುಗಳಲ್ಲಿ) ಓವರ್ಲೋಡ್ ಅನ್ನು ತಡೆದುಕೊಳ್ಳಬಲ್ಲದು ಎಂಬುದನ್ನು ತೋರಿಸುತ್ತದೆ.

ಶೂನ್ಯದಿಂದ ಗರಿಷ್ಠ (ನಿರ್ಣಾಯಕ) ಮೌಲ್ಯಕ್ಕೆ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣದ ವಿಭಾಗವನ್ನು (ಚಿತ್ರ 1, ಬಿವಿ ನೋಡಿ) ಗುಣಲಕ್ಷಣದ ಸ್ಥಿರ ಭಾಗ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ ಮತ್ತು ವಿಭಾಗ BC (Fig. 1, c) - ಅಸ್ಥಿರ ಭಾಗ.
ಹೆಚ್ಚುತ್ತಿರುವ ಸ್ಲಿಪ್ನೊಂದಿಗೆ OF ಗುಣಲಕ್ಷಣಗಳ ಹೆಚ್ಚುತ್ತಿರುವ ಭಾಗದಲ್ಲಿ ಈ ವಿಭಾಗವನ್ನು ವಿವರಿಸಲಾಗಿದೆ, ಅಂದರೆ. ವೇಗ ಕಡಿಮೆಯಾದಂತೆ, ಎಂಜಿನ್ ಅಭಿವೃದ್ಧಿಪಡಿಸಿದ ಟಾರ್ಕ್ ಹೆಚ್ಚಾಗುತ್ತದೆ.ಇದರರ್ಥ ಲೋಡ್ ಹೆಚ್ಚಾದಂತೆ, ಅಂದರೆ, ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್ ಹೆಚ್ಚಾದಂತೆ, ಮೋಟರ್ನ ತಿರುಗುವಿಕೆಯ ವೇಗವು ಕಡಿಮೆಯಾಗುತ್ತದೆ ಮತ್ತು ಟಾರ್ಕ್ ಹೆಚ್ಚಾಗುತ್ತದೆ. ಲೋಡ್ ಕಡಿಮೆಯಾದಾಗ, ಇದಕ್ಕೆ ವಿರುದ್ಧವಾಗಿ, ವೇಗ ಹೆಚ್ಚಾಗುತ್ತದೆ ಮತ್ತು ಟಾರ್ಕ್ ಕಡಿಮೆಯಾಗುತ್ತದೆ. ಗುಣಲಕ್ಷಣದ ಸ್ಥಿರ ಭಾಗದ ವ್ಯಾಪ್ತಿಯ ಉದ್ದಕ್ಕೂ ಲೋಡ್ ಬದಲಾಗುತ್ತಿದ್ದಂತೆ, ಮೋಟಾರ್ ಬದಲಾವಣೆಯ ತಿರುಗುವಿಕೆಯ ವೇಗ ಮತ್ತು ಟಾರ್ಕ್.
ಮೋಟಾರು ನಿರ್ಣಾಯಕ ಟಾರ್ಕ್ಗಿಂತ ಹೆಚ್ಚಿನದನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಲು ಸಾಧ್ಯವಿಲ್ಲ, ಮತ್ತು ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್ ಹೆಚ್ಚಿದ್ದರೆ, ಮೋಟಾರ್ ಅನಿವಾರ್ಯವಾಗಿ ನಿಲ್ಲಬೇಕು. ಅವರು ಹೇಳಿದಂತೆ ಎಂಜಿನ್ ರೋಲ್ಓವರ್ ಸಂಭವಿಸುತ್ತದೆ.
ಸ್ಥಿರ U ಮತ್ತು I ನಲ್ಲಿ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣ ಮತ್ತು ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಹೆಚ್ಚುವರಿ ಪ್ರತಿರೋಧದ ಅನುಪಸ್ಥಿತಿಯನ್ನು ನೈಸರ್ಗಿಕ ಗುಣಲಕ್ಷಣ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ (ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಹೆಚ್ಚುವರಿ ಪ್ರತಿರೋಧವಿಲ್ಲದೆ ಗಾಯದ ರೋಟರ್ನೊಂದಿಗೆ ಅಳಿಲು-ಕೇಜ್ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಗುಣಲಕ್ಷಣ). ಕೃತಕ ಅಥವಾ ರಿಯೊಸ್ಟಾಟಿಕ್ ಗುಣಲಕ್ಷಣಗಳನ್ನು ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಹೆಚ್ಚುವರಿ ಪ್ರತಿರೋಧಕ್ಕೆ ಅನುಗುಣವಾಗಿರುತ್ತವೆ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ಎಲ್ಲಾ ಆರಂಭಿಕ ಟಾರ್ಕ್ ಮೌಲ್ಯಗಳು ವಿಭಿನ್ನವಾಗಿವೆ ಮತ್ತು ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ. ವಿಭಿನ್ನ ಪ್ರಮಾಣದ ಸ್ಲೈಡರ್ಗಳು ಒಂದೇ ನಾಮಮಾತ್ರದ ಟಾರ್ಕ್ Mn ಗೆ ಸಂಬಂಧಿಸಿವೆ. ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನ ಪ್ರತಿರೋಧವು ಹೆಚ್ಚಾದಂತೆ, ಸ್ಲಿಪ್ ಹೆಚ್ಚಾಗುತ್ತದೆ ಮತ್ತು ಆದ್ದರಿಂದ ಮೋಟಾರ್ ವೇಗವು ಕಡಿಮೆಯಾಗುತ್ತದೆ.
ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧವನ್ನು ಸೇರಿಸುವುದರಿಂದ, ಸ್ಥಿರ ಭಾಗದಲ್ಲಿ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣವು ಹೆಚ್ಚುತ್ತಿರುವ ಸ್ಲಿಪ್ನ ದಿಕ್ಕಿನಲ್ಲಿ ವಿಸ್ತರಿಸಲ್ಪಡುತ್ತದೆ, ಪ್ರತಿರೋಧಕ್ಕೆ ಅನುಗುಣವಾಗಿ.ಇದರರ್ಥ ಶಾಫ್ಟ್ ಲೋಡ್ ಅನ್ನು ಅವಲಂಬಿಸಿ ಮೋಟಾರ್ ವೇಗವು ಗಮನಾರ್ಹವಾಗಿ ಬದಲಾಗಲು ಪ್ರಾರಂಭವಾಗುತ್ತದೆ ಮತ್ತು ಹಾರ್ಡ್ ಗುಣಲಕ್ಷಣವು ಮೃದುವಾಗುತ್ತದೆ.