ಮುಖ್ಯ ಕ್ರೇನ್ ಕಾರ್ಯವಿಧಾನಗಳ ಎಂಜಿನ್ಗಳ ಮೇಲೆ ಸ್ಥಿರ ಲೋಡ್ಗಳು
ಲೋಡ್ ಅನ್ನು ಎತ್ತುವ ಸ್ಥಿರ ಕ್ರಮದಲ್ಲಿ ಕ್ರೇನ್ ಹೋಸ್ಟ್ನ ಮೋಟಾರ್ ಶಾಫ್ಟ್ನ ಶಕ್ತಿ ಮತ್ತು ಟಾರ್ಕ್ ಅನ್ನು ಸೂತ್ರಗಳ ಮೂಲಕ ಲೆಕ್ಕಹಾಕಬಹುದು
ಇಲ್ಲಿ P ಮೋಟಾರ್ ಶಾಫ್ಟ್ ಪವರ್, kW; G ಎನ್ನುವುದು ಲೋಡ್ ಅನ್ನು ಎತ್ತುವ ಶಕ್ತಿ, N; G0 - ಹಿಡಿತದ ಸಾಧನದ ಎತ್ತುವ ಬಲ, N; M ಎಂಬುದು ಮೋಟಾರ್ ಶಾಫ್ಟ್ ಕ್ಷಣ, Nm; v ಎಂಬುದು ಲೋಡ್ ಅನ್ನು ಎತ್ತುವ ವೇಗ, m / s; D ಎಂಬುದು ಎಳೆಯುವ ವಿಂಚ್ ಡ್ರಮ್ನ ವ್ಯಾಸ, m; η - ಎತ್ತುವ ಕಾರ್ಯವಿಧಾನದ ದಕ್ಷತೆ; ನಾನು ಗೇರ್ಬಾಕ್ಸ್ ಮತ್ತು ಚೈನ್ ಹೋಸ್ಟ್ನ ಗೇರ್ ಅನುಪಾತವಾಗಿದೆ.
ಅವರೋಹಣ ಕ್ರಮದಲ್ಲಿ, ಅವರೋಹಣ ಲೋಡ್ Pgr ನ ತೂಕದ ಕ್ರಿಯೆಯ ಕಾರಣದಿಂದಾಗಿ ಘರ್ಷಣೆ ಶಕ್ತಿ Ptr ಮತ್ತು ಶಕ್ತಿಯ ನಡುವಿನ ವ್ಯತ್ಯಾಸಕ್ಕೆ ಸಮಾನವಾದ ಶಕ್ತಿಯನ್ನು ಕ್ರೇನ್ ಎಂಜಿನ್ ಅಭಿವೃದ್ಧಿಪಡಿಸುತ್ತದೆ:
ಮಧ್ಯಮ ಮತ್ತು ಭಾರವಾದ ಹೊರೆಗಳನ್ನು ಕಡಿಮೆ ಮಾಡುವಾಗ, ಗೇರ್ ಶಾಫ್ಟ್ನಿಂದ ಮೋಟಾರ್ಗೆ ಶಕ್ತಿಯನ್ನು ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ ಏಕೆಂದರೆ Pgr >> Ptr (ಬ್ರೇಕ್ ಬಿಡುಗಡೆ). ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಮೋಟಾರ್ ಶಾಫ್ಟ್ ಪವರ್, kW, ಸೂತ್ರದಿಂದ ವ್ಯಕ್ತಪಡಿಸಲಾಗುತ್ತದೆ

ಲೈಟ್ ಲೋಡ್ಗಳನ್ನು ಅಥವಾ ಖಾಲಿ ಹುಕ್ ಅನ್ನು ಕಡಿಮೆ ಮಾಡುವಾಗ, Pgr < Ptr ಇರುವ ಸಂದರ್ಭಗಳು ಇರಬಹುದು.ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಎಂಜಿನ್ ಚಲನೆಯ ಕ್ಷಣದೊಂದಿಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ (ವಿದ್ಯುತ್ ಅವರೋಹಣ) ಮತ್ತು ಶಕ್ತಿಯನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುತ್ತದೆ, kW,

ಕೊಟ್ಟಿರುವ ಸೂತ್ರಗಳ ಆಧಾರದ ಮೇಲೆ, ಹುಕ್ನಲ್ಲಿ ಯಾವುದೇ ಲೋಡ್ನಲ್ಲಿ ಕ್ರೇನ್ ಮೋಟರ್ನ ಶಕ್ತಿಯನ್ನು ನಿರ್ಧರಿಸಲು ಸಾಧ್ಯವಿದೆ. ಲೆಕ್ಕಾಚಾರ ಮಾಡುವಾಗ, ಯಾಂತ್ರಿಕತೆಯ ದಕ್ಷತೆಯು ಅದರ ಹೊರೆ (Fig. 1) ಮೇಲೆ ಅವಲಂಬಿತವಾಗಿರುತ್ತದೆ ಎಂದು ನೆನಪಿನಲ್ಲಿಡಬೇಕು.
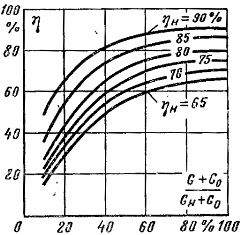
ಅಕ್ಕಿ. 1. ಲೋಡ್ನಲ್ಲಿ ಯಾಂತ್ರಿಕತೆಯ ದಕ್ಷತೆಯ ಅವಲಂಬನೆ.
ಸ್ಥಿರ ಕಾರ್ಯಾಚರಣೆಯ ಕ್ರಮದಲ್ಲಿ ಕ್ರೇನ್ನ ಚಲನೆಯ ಸಮತಲ ಕಾರ್ಯವಿಧಾನಗಳ ಮೋಟಾರ್ಗಳ ಶಾಫ್ಟ್ನಲ್ಲಿನ ಶಕ್ತಿ ಮತ್ತು ಟಾರ್ಕ್ ಅನ್ನು ಸೂತ್ರಗಳಿಂದ ನಿರ್ಧರಿಸಬಹುದು

ಅಲ್ಲಿ P ಎಂಬುದು ಕ್ರೇನ್ ಚಲನೆಯ ಕಾರ್ಯವಿಧಾನದ ಮೋಟಾರ್ ಶಾಫ್ಟ್ ಶಕ್ತಿ, kW; M ಎಂಬುದು ಚಲನೆಯ ಕಾರ್ಯವಿಧಾನದ ಮೋಟಾರ್ ಶಾಫ್ಟ್ ಕ್ಷಣ, Nm; ಜಿ - ಸಾಗಿಸಲಾದ ಸರಕುಗಳ ತೂಕ, ಎನ್; ಜಿ 1 - ಚಲನೆಯ ಕಾರ್ಯವಿಧಾನದ ಸ್ವಂತ ತೂಕ, ಎನ್; v - ಚಲನೆಯ ವೇಗ, m / s; R ಎಂಬುದು ಚಕ್ರದ ತ್ರಿಜ್ಯ, m; r ಎಂಬುದು ಚಕ್ರದ ಆಕ್ಸಲ್ನ ಕತ್ತಿನ ತ್ರಿಜ್ಯ, m; μ - ಸ್ಲೈಡಿಂಗ್ ಘರ್ಷಣೆಯ ಗುಣಾಂಕ (μ = 0.08-0.12); f - ರೋಲಿಂಗ್ ಘರ್ಷಣೆ ಗುಣಾಂಕ, m (f = 0.0005 - 0.001 m); η - ಚಲನೆಯ ಕಾರ್ಯವಿಧಾನದ ದಕ್ಷತೆ; k - ಹಳಿಗಳ ಮೇಲೆ ಚಕ್ರದ ಚಾಚುಪಟ್ಟಿಗಳ ಘರ್ಷಣೆಗೆ ಗುಣಾಂಕ ಲೆಕ್ಕಪತ್ರ; i - ಅಂಡರ್ಕ್ಯಾರೇಜ್ ರಿಡ್ಯೂಸರ್ನ ಗೇರ್ ಅನುಪಾತ.
ಹಲವಾರು ಎತ್ತುವ ಮತ್ತು ಸಾರಿಗೆ ಕಾರ್ಯವಿಧಾನಗಳಲ್ಲಿ, ಚಲನೆಯು ಸಮತಲ ದಿಕ್ಕಿನಲ್ಲಿ ನಡೆಯುವುದಿಲ್ಲ. ಗಾಳಿಯ ಹೊರೆ, ಇತ್ಯಾದಿಗಳ ಪರಿಣಾಮವೂ ಸಹ ಸಾಧ್ಯವಿದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ ಶಕ್ತಿಯನ್ನು ನಿರ್ಧರಿಸುವ ಸೂತ್ರವನ್ನು ಪ್ರತಿನಿಧಿಸಬಹುದು

ಹೆಚ್ಚುವರಿಯಾಗಿ ಗುರುತಿಸಲಾಗಿದೆ: α - ಸಮತಲ ಸಮತಲಕ್ಕೆ ಮಾರ್ಗದರ್ಶಿಗಳ ಇಳಿಜಾರಿನ ಕೋನ; ಎಫ್ - ನಿರ್ದಿಷ್ಟ ಗಾಳಿ ಲೋಡ್, N / m2; S ಎಂಬುದು ಗಾಳಿಯ ಒತ್ತಡವು 90 °, m2 ಕೋನದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಪ್ರದೇಶವಾಗಿದೆ.
ಕೊನೆಯ ಸೂತ್ರದಲ್ಲಿ, ಮೊದಲ ಪದವು ಸಮತಲ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ಘರ್ಷಣೆಯನ್ನು ಜಯಿಸಲು ಅಗತ್ಯವಿರುವ ಮೋಟಾರ್ ಶಾಫ್ಟ್ ಶಕ್ತಿಯನ್ನು ನಿರೂಪಿಸುತ್ತದೆ; ಎರಡನೆಯ ಪದವು ಲಿಫ್ಟ್ ಬಲಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ, ಮೂರನೆಯದು ಗಾಳಿಯ ಹೊರೆಯಿಂದ ವಿದ್ಯುತ್ ಘಟಕವಾಗಿದೆ.
ಹಲವಾರು ಕ್ರೇನ್ಗಳು ಟರ್ನ್ಟೇಬಲ್ ಅನ್ನು ಹೊಂದಿದ್ದು, ಅದರ ಮೇಲೆ ಕೆಲಸ ಮಾಡುವ ಉಪಕರಣಗಳಿವೆ. ಪ್ಲಾಟ್ಫಾರ್ಮ್ನ ಚಲನೆಯು ಗೇರ್ ವೀಲ್ (ಟರ್ನ್ಟೇಬಲ್) ಮೂಲಕ ಹರಡುತ್ತದೆ, ಅದರ ಮೇಲೆ ಡಿಕೆಪಿ ವ್ಯಾಸವನ್ನು ಅಳವಡಿಸಲಾಗಿದೆ. ವೇದಿಕೆ ಮತ್ತು ಸ್ಥಿರ ಬೇಸ್ ನಡುವೆ ಡಿಪಿ ವ್ಯಾಸವನ್ನು ಹೊಂದಿರುವ ರೋಲರುಗಳು (ರೋಲರುಗಳು) ಇವೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಘರ್ಷಣೆಯ ಬಲಗಳಿಂದಾಗಿ ಕ್ರೇನ್ ಮೋಟರ್ನ ಶಕ್ತಿ ಮತ್ತು ಟಾರ್ಕ್ ಪರಸ್ಪರ ಚಲನೆಯ ಸಂದರ್ಭದಲ್ಲಿ ಕಂಡುಬರುತ್ತದೆ, ಅವುಗಳೆಂದರೆ:

ಇಲ್ಲಿ, ತಿಳಿದಿರುವ ಮೌಲ್ಯಗಳ ಜೊತೆಗೆ: G2 ಅದರ ಮೇಲೆ ಎಲ್ಲಾ ಉಪಕರಣಗಳೊಂದಿಗೆ ತಿರುಗುವ ಮೇಜಿನ ತೂಕ, N; ωl - ಕೋನೀಯ ವೇಗ, ವೇದಿಕೆಗಳು, ರಾಡ್/ಸೆಕೆಂಡು; ಇನ್ - ಸ್ವಿಂಗ್ ಯಾಂತ್ರಿಕ ಗೇರ್ಬಾಕ್ಸ್ನ ಗೇರ್ ಅನುಪಾತ ಮತ್ತು ಪ್ರಸರಣದ ಡ್ರೈವ್ ಗೇರ್ - ಟರ್ನ್ಟೇಬಲ್.

ಕ್ರೇನ್ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವಿನ ಶಕ್ತಿಯನ್ನು ನಿರ್ಧರಿಸುವಾಗ, ಕೆಲವು ಸಂದರ್ಭಗಳಲ್ಲಿ ಇಳಿಜಾರಿನಲ್ಲಿ ಕೆಲಸ ಮಾಡುವಾಗ ಲೋಡ್ನಲ್ಲಿನ ಬದಲಾವಣೆಯನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುವುದು ಅವಶ್ಯಕ. ತಿರುಗುವ ಕಾರ್ಯವಿಧಾನಗಳ ಮೇಲೆ ಗಾಳಿಯ ಹೊರೆ ಲೋಡ್, ಕ್ರೇನ್ ಬೂಮ್ ಮತ್ತು ಕೌಂಟರ್ ವೇಟ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಗಾಳಿಯ ಶಕ್ತಿಗಳಲ್ಲಿನ ವ್ಯತ್ಯಾಸವನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಂಡು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ.
ಕ್ರೇನ್ ಕಾರ್ಯವಿಧಾನಗಳಿಗಾಗಿ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ಗಳನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸುವಾಗ, ಮೋಟಾರ್ ಆಯ್ಕೆಯ ಕೊನೆಯಲ್ಲಿ, ಅನುಮತಿಸುವ ವೇಗವರ್ಧಕ ಮೌಲ್ಯಗಳಿಗಾಗಿ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಅನ್ನು ಪರಿಶೀಲಿಸಲಾಗುತ್ತದೆ, ಅದರ ಡೇಟಾವನ್ನು ಕೋಷ್ಟಕ 1 ರಲ್ಲಿ ನೀಡಲಾಗಿದೆ
ಕೋಷ್ಟಕ 1 ಕಾರ್ಯವಿಧಾನಗಳ ಹೆಸರು ಮತ್ತು ಅವುಗಳ ಉದ್ದೇಶ
ಕಾರ್ಯವಿಧಾನಗಳ ಹೆಸರು ಮತ್ತು ಅವುಗಳ ಉದ್ದೇಶ ವೇಗವರ್ಧನೆ, m / s2 ದ್ರವ ಲೋಹಗಳು, ದುರ್ಬಲವಾದ ವಸ್ತುಗಳು, ಉತ್ಪನ್ನಗಳು, ವಿವಿಧ ಅಸೆಂಬ್ಲಿ ಕೆಲಸಗಳನ್ನು ಎತ್ತುವ ಉದ್ದೇಶದಿಂದ ಲಿಫ್ಟಿಂಗ್ ಕಾರ್ಯವಿಧಾನಗಳು 0.1 ಅಸೆಂಬ್ಲಿ ಮತ್ತು ಮೆಟಲರ್ಜಿಕಲ್ ಕಾರ್ಯಾಗಾರಗಳ ಉದ್ಯಾನವನಗಳ ಲಿಫ್ಟಿಂಗ್ ಕಾರ್ಯವಿಧಾನಗಳು 0.2 - 0.5 ಗ್ರಿಪ್ಪಿಂಗ್ ಕ್ರೇನ್ಗಳ ಲಿಫ್ಟಿಂಗ್ ಕಾರ್ಯವಿಧಾನಗಳು 0.8 ಯಾಂತ್ರಿಕತೆಗಳಿಗೆ ನಿಖರವಾದ ಜೋಡಣೆ ಕೆಲಸ ಮತ್ತು ದ್ರವ ಲೋಹಗಳ ಸಾಗಣೆಗೆ ಉದ್ದೇಶಿಸಲಾದ ಕ್ರೇನ್ಗಳ ಚಲನೆ, ದುರ್ಬಲವಾದ ವಸ್ತುಗಳು 0.1 - 0.2 ಪೂರ್ಣ ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಬಲದೊಂದಿಗೆ ಚಲನೆಯ ಕಾರ್ಯವಿಧಾನಗಳು 0.2 - 0.7 ಪೂರ್ಣ ಹಿಡಿತ ಕ್ರೇನ್ ಟ್ರಾಲಿಗಳು 0.8 - 1.4 ಕ್ರೇನ್ ಸ್ವಿವೆಲ್ಸ್ 0.5 - 1.5