ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು
 ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವಿನ ಆಯ್ಕೆಯು ಕೆಲಸದ ಯಂತ್ರದ ಅವಶ್ಯಕತೆಗಳಿಂದ ನಿರ್ಧರಿಸಲ್ಪಡುತ್ತದೆ. ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಕೆಲಸ ಮಾಡುವ ಯಂತ್ರವು ಎಲ್ಲಾ ಸಂಭಾವ್ಯ ವಿಧಾನಗಳಲ್ಲಿ ನಿಗದಿತ ತಂತ್ರಜ್ಞಾನವನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಬೇಕು: ಲೋಡ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವುದು, ಸ್ವೀಕರಿಸುವುದು ಮತ್ತು ಹೊರಹಾಕುವುದು, ನಿಲ್ಲಿಸುವುದು, ವೇಗವನ್ನು ಬದಲಾಯಿಸುವುದು, ನಿರಂತರ ಲೋಡ್. ಈ ವಿಧಾನಗಳ ಸ್ವರೂಪವನ್ನು ಮುಖ್ಯವಾಗಿ ಎಂಜಿನ್ ಮತ್ತು ಕೆಲಸದ ಯಂತ್ರದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ ... ಎಂಜಿನ್ ಮತ್ತು ಕೆಲಸ ಮಾಡುವ ಯಂತ್ರದ ಎರಡೂ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡುವ ಮುಖ್ಯ ಮಾನದಂಡವೆಂದರೆ ಅವುಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು.
ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವಿನ ಆಯ್ಕೆಯು ಕೆಲಸದ ಯಂತ್ರದ ಅವಶ್ಯಕತೆಗಳಿಂದ ನಿರ್ಧರಿಸಲ್ಪಡುತ್ತದೆ. ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಕೆಲಸ ಮಾಡುವ ಯಂತ್ರವು ಎಲ್ಲಾ ಸಂಭಾವ್ಯ ವಿಧಾನಗಳಲ್ಲಿ ನಿಗದಿತ ತಂತ್ರಜ್ಞಾನವನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಬೇಕು: ಲೋಡ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವುದು, ಸ್ವೀಕರಿಸುವುದು ಮತ್ತು ಹೊರಹಾಕುವುದು, ನಿಲ್ಲಿಸುವುದು, ವೇಗವನ್ನು ಬದಲಾಯಿಸುವುದು, ನಿರಂತರ ಲೋಡ್. ಈ ವಿಧಾನಗಳ ಸ್ವರೂಪವನ್ನು ಮುಖ್ಯವಾಗಿ ಎಂಜಿನ್ ಮತ್ತು ಕೆಲಸದ ಯಂತ್ರದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ ... ಎಂಜಿನ್ ಮತ್ತು ಕೆಲಸ ಮಾಡುವ ಯಂತ್ರದ ಎರಡೂ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡುವ ಮುಖ್ಯ ಮಾನದಂಡವೆಂದರೆ ಅವುಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು.
ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ನ ಯಾಂತ್ರಿಕ ಲಕ್ಷಣವೆಂದರೆ ಮೋಟಾರು ω=φ(Md) ಅಥವಾ n = e(Md) ಅಭಿವೃದ್ಧಿಪಡಿಸಿದ ಟಾರ್ಕ್ನಲ್ಲಿ ಶಾಫ್ಟ್ನ ತಿರುಗುವಿಕೆಯ ವೇಗದ ಅವಲಂಬನೆಯಾಗಿದೆ, ಅಲ್ಲಿ ω - ಶಾಫ್ಟ್, ರಾಡ್ನ ತಿರುಗುವಿಕೆಯ ಕೋನೀಯ ವೇಗ / ಸೆಕೆಂಡ್, ಎನ್ - ಶಾಫ್ಟ್ ತಿರುಗುವಿಕೆಯ ವೇಗ, ಆರ್ಪಿಎಂ
ಮೋಟರ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣವನ್ನು ನೈಸರ್ಗಿಕ ಅವಲಂಬನೆ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ n = f (M) ವಿದ್ಯುತ್ ನೆಟ್ವರ್ಕ್ನ ನಾಮಮಾತ್ರದ ನಿಯತಾಂಕಗಳೊಂದಿಗೆ ಪಡೆಯಲಾಗುತ್ತದೆ, ಸಾಮಾನ್ಯ ಸಂಪರ್ಕ ಯೋಜನೆ ಮತ್ತು ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಹೆಚ್ಚುವರಿ ಪ್ರತಿರೋಧಗಳಿಲ್ಲದೆ.
ಹೆಚ್ಚುವರಿ ಪ್ರತಿರೋಧಗಳು ಇದ್ದಲ್ಲಿ ಅಥವಾ ನಾಮಮಾತ್ರವನ್ನು ಹೊರತುಪಡಿಸಿ ವೋಲ್ಟೇಜ್ ಅಥವಾ ಆವರ್ತನದೊಂದಿಗೆ ನೆಟ್ವರ್ಕ್ನಿಂದ ಮೋಟರ್ ಅನ್ನು ನೀಡಿದರೆ, ಮೋಟರ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಕೃತಕ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ ... ನಿಸ್ಸಂಶಯವಾಗಿ, ಮೋಟರ್ ಅನಂತ ಸಂಖ್ಯೆಯ ಕೃತಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೊಂದಿದೆ ಮತ್ತು ಕೇವಲ ಒಂದು ನೈಸರ್ಗಿಕ.
ಹೆಚ್ಚಿನ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ಗಳು, ಲೋಡ್ ಅಡಿಯಲ್ಲಿ, ಟಾರ್ಕ್ ಹೆಚ್ಚಾದಂತೆ ವೇಗದಲ್ಲಿ ಕಡಿಮೆಯಾಗುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ ವಿಶಿಷ್ಟತೆಯನ್ನು ಬೀಳುವಿಕೆ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ ... ಟಾರ್ಕ್ ಬದಲಾವಣೆಯೊಂದಿಗೆ ಎಂಜಿನ್ ವೇಗದಲ್ಲಿನ ಬದಲಾವಣೆಯ ಮಟ್ಟವನ್ನು ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳ ಠೀವಿ ಎಂದು ಕರೆಯುವ ಮೂಲಕ ಅಂದಾಜಿಸಲಾಗಿದೆ, ಇದನ್ನು ಅನುಪಾತ α = ΔM / Δω ಅಥವಾ α = ΔM ನಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ / ΔN
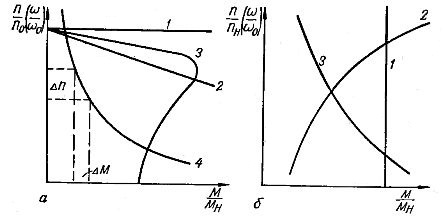
ಅಕ್ಕಿ. 1. ವಿವಿಧ ರೀತಿಯ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು: a — ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ಗಳು, b — ಉತ್ಪಾದನಾ ಯಂತ್ರಗಳು.
ಕ್ಷಣದಲ್ಲಿನ ಬದಲಾವಣೆಯ ಮೌಲ್ಯಗಳು ಮತ್ತು ಬಿಗಿತದ ನಿರ್ಣಯದಲ್ಲಿನ ಕುಸಿತದ ದರವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಸಾಪೇಕ್ಷ ಘಟಕಗಳಲ್ಲಿ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ. ವಿವಿಧ ರೀತಿಯ ಎಂಜಿನ್ಗಳ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೋಲಿಸಲು ಇದು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ.
ಬಿಗಿತದ ಮಟ್ಟವನ್ನು ಅವಲಂಬಿಸಿ, ಎಂಜಿನ್ಗಳ ಎಲ್ಲಾ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಕೆಳಗಿನ ಗುಂಪುಗಳಾಗಿ ವಿಂಗಡಿಸಲಾಗಿದೆ.
1. ಠೀವಿ ಮೌಲ್ಯದೊಂದಿಗೆ ಸಂಪೂರ್ಣ ಭಾರೀ ಕಾರ್ಯಕ್ಷಮತೆ α = ∞... ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್ಗಳು ಅಂತಹ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೊಂದಿವೆ (ಕರ್ವ್ 1, ಚಿತ್ರ 1, a) ತಿರುಗುವಿಕೆಯ ಕಟ್ಟುನಿಟ್ಟಾದ ಸ್ಥಿರ ವೇಗದೊಂದಿಗೆ.
2. ಹೆಚ್ಚುತ್ತಿರುವ ಟಾರ್ಕ್ ಮತ್ತು α = 40 — 10 ರೊಂದಿಗೆ ವೇಗದಲ್ಲಿ ತುಲನಾತ್ಮಕವಾಗಿ ಸಣ್ಣ ಕುಸಿತದೊಂದಿಗೆ ಘನ ಗುಣಲಕ್ಷಣಗಳು.ಈ ಗುಂಪು ಸ್ವತಂತ್ರ ಪ್ರಚೋದನೆ (ಕರ್ವ್ 2) ಮತ್ತು ರೇಖೀಯ ವಿಭಾಗದಲ್ಲಿ (ಕರ್ವ್ 3) ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ಗಳ ಗುಣಲಕ್ಷಣಗಳೊಂದಿಗೆ DC ಮೋಟಾರ್ಗಳ ನೈಸರ್ಗಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಒಳಗೊಂಡಿದೆ.
3. ಹೆಚ್ಚುತ್ತಿರುವ ಟಾರ್ಕ್ನೊಂದಿಗೆ ಮತ್ತು α = 10 ವರೆಗಿನ ಬಿಗಿತದೊಂದಿಗೆ ವೇಗದಲ್ಲಿ ದೊಡ್ಡ ಸಾಪೇಕ್ಷ ಕುಸಿತದೊಂದಿಗೆ ಮೃದುವಾದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು DC ಮೋಟಾರ್ಗಳನ್ನು ಸರಣಿ ಪ್ರಚೋದನೆಯೊಂದಿಗೆ (ಕರ್ವ್ 4), ಸ್ವತಂತ್ರವಾಗಿ ಉತ್ತೇಜಿತ ಮೋಟಾರ್ಗಳು ಹೆಚ್ಚಿನ ಆರ್ಮೇಚರ್ ಪ್ರತಿರೋಧದೊಂದಿಗೆ ಮತ್ತು ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು ಹೆಚ್ಚುವರಿ ಪ್ರತಿರೋಧವನ್ನು ಹೊಂದಿವೆ. ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ.
ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವಿನ ಕಾರ್ಯಾಚರಣೆಯ ಸಮಯದಲ್ಲಿ, ಕೆಲಸ ಮಾಡುವ ಯಂತ್ರದ ಪ್ರತಿರೋಧವನ್ನು ಜಯಿಸಲು, ಮೋಟಾರ್ ಒಂದು ನಿರ್ದಿಷ್ಟ ಕ್ಷಣವನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಬೇಕು. ಆದ್ದರಿಂದ, ಎಂಜಿನ್ ಅನ್ನು ಆಯ್ಕೆಮಾಡುವಾಗ, ಎಂಜಿನ್ ಮತ್ತು ಕೆಲಸ ಮಾಡುವ ಯಂತ್ರದ ಗುಣಲಕ್ಷಣಗಳ ಪತ್ರವ್ಯವಹಾರವನ್ನು ಗುರುತಿಸುವುದು ಮೊದಲು ಅಗತ್ಯವಾಗಿರುತ್ತದೆ.

ಕೆಲಸ ಮಾಡುವ ಯಂತ್ರಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು
ಕೆಲಸ ಮಾಡುವ ಯಂತ್ರದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣವು ಡ್ರೈವ್ ಶಾಫ್ಟ್ನ ತಿರುಗುವಿಕೆಯ ವೇಗದ ಮೇಲೆ ಯಂತ್ರದ ಸ್ಥಿರ ಪ್ರತಿರೋಧದ ಕ್ಷಣದ ಅವಲಂಬನೆಯಾಗಿದೆ. ಜಂಟಿ ನಿರ್ಮಾಣದ ಅನುಕೂಲಕ್ಕಾಗಿ, ಈ ಅವಲಂಬನೆಯನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಮೋಟಾರ್ ಗುಣಲಕ್ಷಣದ ರೀತಿಯಲ್ಲಿಯೇ ವ್ಯಕ್ತಪಡಿಸಲಾಗುತ್ತದೆ, ರೂಪದಲ್ಲಿ ω=φ(Ms -Ms) ಅಥವಾ n =e(Miss).
ಸ್ಥಿರ ಪ್ರತಿರೋಧದ ಕ್ಷಣ Ms, ಅಥವಾ ಸಂಕ್ಷಿಪ್ತವಾಗಿ ಸ್ಥಿರ ಕ್ಷಣ, ವೇಗವು ಬದಲಾಗದೆ ಇದ್ದಾಗ ಸ್ಥಿರ (ಸ್ಥಾಯಿ) ಮೋಡ್ನಲ್ಲಿ ಡ್ರೈವ್ ಶಾಫ್ಟ್ನಲ್ಲಿ ಯಂತ್ರದಿಂದ ರಚಿಸಲಾದ ಪ್ರತಿರೋಧದ ಕ್ಷಣವಾಗಿದೆ.
ಚಲನಶಾಸ್ತ್ರದ ಯೋಜನೆಯ ಅಂಶಗಳ ಮೇಲೆ ಸ್ಥಿರ ಶಕ್ತಿಗಳು ಅಥವಾ ಕ್ಷಣಗಳ ವಿತರಣೆಯು ತಿಳಿದಿದ್ದರೆ ಯಂತ್ರದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಪ್ರಾಯೋಗಿಕವಾಗಿ ಅಥವಾ ಲೆಕ್ಕಾಚಾರದ ಮೂಲಕ ಪಡೆಯಬಹುದು.ಯಂತ್ರಗಳ ಸ್ಥಿರ ಕ್ಷಣಗಳು ವೇಗದ ಮೇಲೆ ಮಾತ್ರವಲ್ಲದೆ ಇತರ ಪ್ರಮಾಣಗಳ ಮೇಲೂ ಅವಲಂಬಿತವಾಗಬಹುದು, ಆದ್ದರಿಂದ, ವಿದ್ಯುತ್ ಡ್ರೈವ್ಗಳ ಪ್ರಾಯೋಗಿಕ ಲೆಕ್ಕಾಚಾರದಲ್ಲಿ, ಪ್ರತಿಯೊಂದು ಪ್ರಕರಣವನ್ನು ಪ್ರತ್ಯೇಕವಾಗಿ ಪರಿಗಣಿಸುವುದು ಅವಶ್ಯಕ.
ವಿವಿಧ ಕೆಲಸ ಮಾಡುವ ಯಂತ್ರಗಳ ಸ್ಥಿರ ಕ್ಷಣಗಳನ್ನು ಅವುಗಳ ವೇಗ ಅವಲಂಬನೆಯ ಸ್ವರೂಪಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಗುಂಪುಗಳಾಗಿ ವಿಂಗಡಿಸಲಾಗಿದೆ (ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು). ಆಚರಣೆಯಲ್ಲಿ ಅತ್ಯಂತ ಸಾಮಾನ್ಯವಾದವು ಈ ಕೆಳಗಿನವುಗಳಾಗಿವೆ.
1. ಸ್ಥಿರ ಕ್ಷಣವು ಸ್ವಲ್ಪಮಟ್ಟಿಗೆ ಅವಲಂಬಿತವಾಗಿರುತ್ತದೆ ಅಥವಾ ಪ್ರಾಯೋಗಿಕವಾಗಿ ವೇಗವನ್ನು ಅವಲಂಬಿಸಿಲ್ಲ (ಕರ್ವ್ 1, ಚಿತ್ರ 2, ಬಿ). ಅಂತಹ ಗುಣಲಕ್ಷಣಗಳು ಎತ್ತುವ ಕಾರ್ಯವಿಧಾನಗಳು, ಕ್ರೇನ್ಗಳು, ವಿಂಚ್ಗಳು, ಹೋಸ್ಟ್ಗಳು ಮತ್ತು ನಿರಂತರ ಹೊರೆಯಲ್ಲಿ ಬೆಲ್ಟ್ ಕನ್ವೇಯರ್ಗಳನ್ನು ಹೊಂದಿವೆ.
2. ಯಂತ್ರದ ಸ್ಥಿರ ಕ್ಷಣವು ವೇಗದ ಚೌಕಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಹೆಚ್ಚಾಗುತ್ತದೆ (ಕರ್ವ್ 2). ಈ ಗುಣಲಕ್ಷಣ, ಅಕ್ಷೀಯ ಅಭಿಮಾನಿಗಳ ಗುಣಲಕ್ಷಣವನ್ನು ಫ್ಯಾನ್ನ ಗುಣಲಕ್ಷಣ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ ಮತ್ತು ವಿಶ್ಲೇಷಣಾತ್ಮಕವಾಗಿ ಸೂತ್ರದ ರೂಪದಲ್ಲಿ ಪ್ರಸ್ತುತಪಡಿಸಲಾಗುತ್ತದೆ: Mc = Mo + kn2, ಇಲ್ಲಿ Mo ಎಂಬುದು ಆರಂಭಿಕ ಸ್ಥಿರ ಕ್ಷಣವಾಗಿದೆ, ಹೆಚ್ಚಾಗಿ ಘರ್ಷಣೆಯ ಶಕ್ತಿಗಳಿಂದಾಗಿ, ಸಾಮಾನ್ಯವಾಗಿ ಮಾಡುವುದಿಲ್ಲ ವೇಗವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ, k ಪ್ರಾಯೋಗಿಕ ಗುಣಾಂಕವಾಗಿದೆ. ಅಭಿಮಾನಿಗಳ ಜೊತೆಗೆ, ಕೇಂದ್ರಾಪಗಾಮಿ ಮತ್ತು ಸುಳಿಯ ಪಂಪ್ಗಳು, ವಿಭಜಕಗಳು, ಕೇಂದ್ರಾಪಗಾಮಿಗಳು, ಪ್ರೊಪೆಲ್ಲರ್ಗಳು, ಟರ್ಬೋಚಾರ್ಜರ್ಗಳು ಮತ್ತು ತಿರುಗುವ ಡ್ರಮ್ ಐಡ್ಲರ್ಗಳು ಫ್ಯಾನ್ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೊಂದಿವೆ.
3. ಹೆಚ್ಚುತ್ತಿರುವ ವೇಗದೊಂದಿಗೆ ಸ್ಥಿರ ಕ್ಷಣವು ಕಡಿಮೆಯಾಗುತ್ತದೆ (ಕರ್ವ್ 3). ಈ ಗುಂಪು ಕೆಲವು ಕನ್ವೇಯರ್ ಕಾರ್ಯವಿಧಾನಗಳು ಮತ್ತು ಕೆಲವು ಲೋಹದ ಕತ್ತರಿಸುವ ಯಂತ್ರಗಳ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಒಳಗೊಂಡಿದೆ.
4. ಸ್ಥಿರ ಕ್ಷಣವು ಅಸ್ಪಷ್ಟವಾಗಿ ವೇಗದೊಂದಿಗೆ ಬದಲಾಗುತ್ತದೆ, ತಾಂತ್ರಿಕ ಪ್ರಕ್ರಿಯೆಯ ವಿಶಿಷ್ಟತೆಗಳ ಕಾರಣದಿಂದಾಗಿ ತೀಕ್ಷ್ಣವಾದ ಪರಿವರ್ತನೆಯೊಂದಿಗೆ. ಈ ಗುಂಪಿನ ಗುಣಲಕ್ಷಣಗಳು ಆಗಾಗ್ಗೆ ದೊಡ್ಡ ಓವರ್ಲೋಡ್ಗಳೊಂದಿಗೆ ಕೆಲಸ ಮಾಡುವ ಯಂತ್ರಗಳನ್ನು ಹೊಂದಿವೆ, ಇದು ಕೆಲವೊಮ್ಮೆ ಸಂಪೂರ್ಣ ನಿಲುಗಡೆಗೆ ಕಾರಣವಾಗುತ್ತದೆ.ಉದಾಹರಣೆಗೆ, ಏಕ-ಬಕೆಟ್ ಅಗೆಯುವ ಯಂತ್ರಕ್ಕಾಗಿ ಸ್ಕೂಪಿಂಗ್ ಯಾಂತ್ರಿಕತೆ, ಸ್ಕ್ರಾಪರ್ ಕನ್ವೇಯರ್, ಸಾಗಿಸಿದ ದ್ರವ್ಯರಾಶಿ, ಕ್ರಷರ್ಗಳು ಮತ್ತು ಇತರ ಯಂತ್ರಗಳನ್ನು ನಿರ್ಬಂಧಿಸುವ ಅಡಿಯಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ.
ಪಟ್ಟಿ ಮಾಡಲಾದವುಗಳ ಜೊತೆಗೆ, ಪ್ರಾಯೋಗಿಕವಾಗಿ ಯಂತ್ರಗಳ ಇತರ ರೀತಿಯ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳಿವೆ, ಉದಾಹರಣೆಗೆ, ಪಿಸ್ಟನ್ ಪಂಪ್ಗಳು ಮತ್ತು ಕಂಪ್ರೆಸರ್ಗಳು, ಅವರ ಸ್ಥಿರ ಕ್ಷಣಗಳು ಮಾರ್ಗವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ.