ಸ್ಟೇಟರ್ನ ಪೋಲ್ ಜೋಡಿಗಳ ಸಂಖ್ಯೆಯನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಕೋನೀಯ ವೇಗದ ನಿಯಂತ್ರಣ
 ಧ್ರುವ ಜೋಡಿಗಳ ಸಂಖ್ಯೆಯು ಹೆಚ್ಚಾದಂತೆ, ಕ್ಷೇತ್ರದ ಕೋನೀಯ ವೇಗವು ಕಡಿಮೆಯಾಗುತ್ತದೆ, ಆದ್ದರಿಂದ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ರೋಟರ್ ವೇಗವೂ ಕಡಿಮೆಯಾಗುತ್ತದೆ. ವಿಶೇಷ ಆವೃತ್ತಿ ಎರಡು-ವೇಗದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು, ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳು ಪ್ರತ್ಯೇಕ ಭಾಗಗಳನ್ನು ಒಳಗೊಂಡಿರುತ್ತವೆ. ಅವುಗಳನ್ನು ಎರಡು ವಿಭಿನ್ನ ರೀತಿಯಲ್ಲಿ ಮತ್ತೆ ಸಂಪರ್ಕಿಸಬಹುದು: ನಕ್ಷತ್ರ ಮತ್ತು ಡಬಲ್ ಸ್ಟಾರ್ (ಚಿತ್ರ 1, ಎ, ಬಿ) ಅಥವಾ ತ್ರಿಕೋನ ಮತ್ತು ಡಬಲ್ ಸ್ಟಾರ್ (ಚಿತ್ರ 1, ಬಿ, ಡಿ).
ಧ್ರುವ ಜೋಡಿಗಳ ಸಂಖ್ಯೆಯು ಹೆಚ್ಚಾದಂತೆ, ಕ್ಷೇತ್ರದ ಕೋನೀಯ ವೇಗವು ಕಡಿಮೆಯಾಗುತ್ತದೆ, ಆದ್ದರಿಂದ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ರೋಟರ್ ವೇಗವೂ ಕಡಿಮೆಯಾಗುತ್ತದೆ. ವಿಶೇಷ ಆವೃತ್ತಿ ಎರಡು-ವೇಗದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು, ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳು ಪ್ರತ್ಯೇಕ ಭಾಗಗಳನ್ನು ಒಳಗೊಂಡಿರುತ್ತವೆ. ಅವುಗಳನ್ನು ಎರಡು ವಿಭಿನ್ನ ರೀತಿಯಲ್ಲಿ ಮತ್ತೆ ಸಂಪರ್ಕಿಸಬಹುದು: ನಕ್ಷತ್ರ ಮತ್ತು ಡಬಲ್ ಸ್ಟಾರ್ (ಚಿತ್ರ 1, ಎ, ಬಿ) ಅಥವಾ ತ್ರಿಕೋನ ಮತ್ತು ಡಬಲ್ ಸ್ಟಾರ್ (ಚಿತ್ರ 1, ಬಿ, ಡಿ).
ಡಬಲ್ ಸ್ಟಾರ್ನಲ್ಲಿ, ಕ್ಷೇತ್ರದ ವೇಗ ಯಾವಾಗಲೂ ನಕ್ಷತ್ರ ಅಥವಾ ತ್ರಿಕೋನಕ್ಕಿಂತ ಎರಡು ಪಟ್ಟು ಇರುತ್ತದೆ. ಆದಾಗ್ಯೂ, ಈ ಸ್ವಿಚ್ಗಳು ಸಮಾನವಾಗಿಲ್ಲ. ಸತ್ಯವೆಂದರೆ ನಿರಂತರ ಕಾರ್ಯಾಚರಣೆಯ ಸಮಯದಲ್ಲಿ ಗರಿಷ್ಠ ಅನುಮತಿಸುವ ಟಾರ್ಕ್ ಅನ್ನು ವಿಂಡ್ಗಳ ತಾಪನ ಪರಿಸ್ಥಿತಿಗಳಿಗೆ ಅನುಗುಣವಾಗಿ ಗರಿಷ್ಠ ಅನುಮತಿಸುವ ಹಂತದ ಪ್ರವಾಹದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಹಂತದ ವೋಲ್ಟೇಜ್ನ ಚೌಕಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಸ್ಟೇಟರ್ ಫ್ಲಕ್ಸ್ ಅನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ. ದೀರ್ಘಾವಧಿಯ ಅನುಮತಿಸುವ ಶಕ್ತಿಯು ಅದೇ ಮೌಲ್ಯಗಳನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ.
ನೀವು ಮೋಟಾರ್ನ ವಿಂಡ್ಗಳನ್ನು ನಕ್ಷತ್ರದಿಂದ ಡಬಲ್ ಸ್ಟಾರ್ಗೆ ಬದಲಾಯಿಸಿದರೆ, ಹಂತದ ವೋಲ್ಟೇಜ್ ಬದಲಾಗುವುದಿಲ್ಲ ಮತ್ತು ಡೆಲ್ಟಾದಿಂದ ಡಬಲ್ ಸ್ಟಾರ್ಗೆ ಬದಲಾಯಿಸುವಾಗ, ಅದು √3 ಬಾರಿ ಕಡಿಮೆಯಾಗುತ್ತದೆ. ಆದರೆ ಡಬಲ್ ಸ್ಟಾರ್ನೊಂದಿಗೆ, ಪ್ರತಿ ಹಂತದಲ್ಲಿನ ಪ್ರವಾಹವು ನಕ್ಷತ್ರ ಅಥವಾ ಡೆಲ್ಟಾಕ್ಕಿಂತ ಎರಡು ಪಟ್ಟು ಹೆಚ್ಚಾಗಿರುತ್ತದೆ, ಏಕೆಂದರೆ ಪ್ರತಿ ಹಂತವು ಎರಡು ಸಮಾನಾಂತರ ಶಾಖೆಗಳನ್ನು ಹೊಂದಿರುತ್ತದೆ. ನಕ್ಷತ್ರದಿಂದ ಡಬಲ್ ಸ್ಟಾರ್ಗೆ ಹೋಗುವಾಗ, ವೇಗ ಮತ್ತು ಶಕ್ತಿಯು ದ್ವಿಗುಣಗೊಳ್ಳುತ್ತದೆ, ಆದ್ದರಿಂದ ನಿರ್ಣಾಯಕ ಕ್ಷಣವು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ (M = P /ω= const).
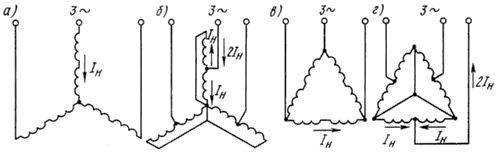
ಅಕ್ಕಿ. 1. ನಕ್ಷತ್ರ (ಎ) ಮತ್ತು ಡಬಲ್ ಸ್ಟಾರ್ (ಬಿ), ಡೆಲ್ಟಾಸ್ (ಸಿ) ಮತ್ತು ಡಬಲ್ ಸ್ಟಾರ್ (ಡಿ) ನಲ್ಲಿ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳನ್ನು ಸಂಪರ್ಕಿಸುವ ಯೋಜನೆಗಳು
ನೀವು ಡೆಲ್ಟಾದಿಂದ ಡಬಲ್ ಸ್ಟಾರ್ಗೆ ಹೋದರೆ, ಹಂತದ ವೋಲ್ಟೇಜ್ √3 ಬಾರಿ ಕಡಿಮೆಯಾಗುತ್ತದೆ. ನಂತರ, ಎರಡು-ಹಂತದ ಪ್ರವಾಹದೊಂದಿಗೆ ಸಹ, ವಿದ್ಯುತ್ 2 /√3 = l, 18 ಬಾರಿ ಮಾತ್ರ ಹೆಚ್ಚಾಗುತ್ತದೆ ಮತ್ತು ಬದಲಾಗದೆ ಪರಿಗಣಿಸಬಹುದು. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಕೋನೀಯ ವೇಗವು ಎರಡು ಪಟ್ಟು ಹೆಚ್ಚಾದಂತೆ, ಶಕ್ತಿಯು ಬಹುತೇಕ ಬದಲಾಗುತ್ತದೆ, ಮತ್ತು ಕ್ಷಣವು ಸರಿಸುಮಾರು ಎರಡು ಅಂಶಗಳಿಂದ ಕಡಿಮೆಯಾಗುತ್ತದೆ. ಹೀಗಾಗಿ, ಡ್ರೈವಿಂಗ್ ಲಿಫ್ಟಿಂಗ್ ಸಾಧನಗಳಿಗೆ ಮೋಟಾರ್ಗಳನ್ನು ಬಳಸಲು ಶಿಫಾರಸು ಮಾಡಲಾಗಿದೆ, ಅದರ ವಿಂಡ್ಗಳನ್ನು ನಕ್ಷತ್ರದಲ್ಲಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ ಮತ್ತು ಲೋಹದ ಕತ್ತರಿಸುವ ಯಂತ್ರಗಳನ್ನು ಚಾಲನೆ ಮಾಡಲು, ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳನ್ನು ಡೆಲ್ಟಾದಲ್ಲಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ.

ಅಕ್ಕಿ. 2. ಬಹು-ವೇಗದ ಮೋಟರ್ನ ಪಾಸ್ಪೋರ್ಟ್ ಡೇಟಾ
ಪರಸ್ಪರ ಪ್ರತ್ಯೇಕಿಸಲಾದ ಎರಡು ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳೊಂದಿಗೆ ಅಸಮಕಾಲಿಕ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳಿವೆ, ಅವುಗಳಲ್ಲಿ ಒಂದು ಸ್ವಿಚಿಂಗ್ ಇಲ್ಲದೆ, ಮತ್ತು ಎರಡನೆಯದು ಸ್ವಿಚಿಂಗ್ ಧ್ರುವಗಳೊಂದಿಗೆ. ಅದರ ನಂತರ, ಮೂರು-ವೇಗದ ಎಂಜಿನ್ಗಳನ್ನು ಪಡೆಯಲಾಗುತ್ತದೆ. ಎರಡೂ ವಿಂಡ್ಗಳು ಧ್ರುವ-ಬದಲಾಯಿಸಿದರೆ, ಮೋಟಾರ್ಗಳು ನಾಲ್ಕು-ಹಂತಗಳಾಗಿವೆ. ಕೆಲವು ಸಂದರ್ಭಗಳಲ್ಲಿ, ವಿಭಿನ್ನ ಸಂಖ್ಯೆಯ ಪೋಲ್ ಜೋಡಿಗಳೊಂದಿಗೆ ಎರಡು ಇನ್ಸುಲೇಟೆಡ್ ವಿಂಡ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. pp ಬದಲಾಯಿಸದೆ.ಉದಾಹರಣೆಗೆ, ಎಲಿವೇಟರ್ ಮೋಟಾರ್ಗಳಲ್ಲಿ p1 = 3 ಮತ್ತು p2 = 12, ಇದು 1000 ಮತ್ತು 250 rpm ನ ತಿರುಗುವಿಕೆಯ ಸಿಂಕ್ರೊನಸ್ ವೇಗಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ.
ಅಂಜೂರದಲ್ಲಿ. 3a ಎರಡು-ವೇಗದ ಸ್ಟಾರ್-ಟು-ಡಬಲ್-ಸ್ಟಾರ್ ಮೋಟಾರ್, ಮತ್ತು FIG ಗಾಗಿ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ತೋರಿಸುತ್ತದೆ. 3, ಬಿ - ತ್ರಿಕೋನದಿಂದ ಡಬಲ್ ಸ್ಟಾರ್ಗೆ ಬದಲಾಯಿಸುವಾಗ.
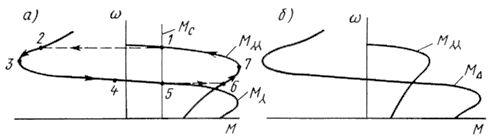
ಅಕ್ಕಿ. 3... ನಕ್ಷತ್ರದಿಂದ ಡಬಲ್ ಸ್ಟಾರ್ (ಎ) ಮತ್ತು ಡೆಲ್ಟಾದಿಂದ ಡಬಲ್ ಸ್ಟಾರ್ (ಬಿ) ಗೆ ಬದಲಾಯಿಸುವಾಗ ಅಸಮಕಾಲಿಕ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು
ಹೆಚ್ಚಿನ ವೇಗದಿಂದ ಕಡಿಮೆ ವೇಗಕ್ಕೆ ತ್ವರಿತ ಬದಲಾವಣೆಯ ಸಂದರ್ಭದಲ್ಲಿ, ಎಂಜಿನ್ ಸ್ವಲ್ಪ ಸಮಯದವರೆಗೆ ಚಲಿಸುತ್ತದೆ. ಅಮಾನತು ಮೋಡ್… ವಾಸ್ತವವಾಗಿ, ಕ್ಷೇತ್ರದ ವೇಗ ಕಡಿಮೆಯಾದರೆ, ಮೊದಲ ಕ್ಷಣದಲ್ಲಿ ರೋಟರ್ ಅದೇ ವೇಗದಲ್ಲಿ ತಿರುಗುವುದನ್ನು ಮುಂದುವರಿಸುತ್ತದೆ.
ಎಂಜಿನ್ ತಕ್ಷಣವೇ ಒಂದು ಗುಣಲಕ್ಷಣದಿಂದ ಇನ್ನೊಂದಕ್ಕೆ ಬದಲಾಗುತ್ತದೆ, ಅಂದರೆ. ಪಾಯಿಂಟ್ 1 ರಿಂದ ಪಾಯಿಂಟ್ 2 ವರೆಗೆ (ಚಿತ್ರ 3, ಎ). ಪುನರುತ್ಪಾದಕ ಬ್ರೇಕಿಂಗ್ ಅನುಸರಿಸುತ್ತದೆ (ಪಾಯಿಂಟ್ 2, 3, 4), ಪಾಯಿಂಟ್ 5 ನಲ್ಲಿ ಅದು ಸ್ಥಿರ ಸ್ಥಿತಿಯಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ. ನೀವು ಕಡಿಮೆ ವೇಗದಿಂದ ಹೆಚ್ಚಿನದಕ್ಕೆ ಬದಲಾಯಿಸಿದರೆ, ಮೋಟಾರ್ ತಕ್ಷಣವೇ ಪಾಯಿಂಟ್ 5 ರಿಂದ ಪಾಯಿಂಟ್ ಬಿ ಗೆ ಚಲಿಸುತ್ತದೆ, ನಂತರ ವೇಗವರ್ಧನೆಯು ಅನುಸರಿಸುತ್ತದೆ (ಪಾಯಿಂಟ್ 6 ಮತ್ತು 7) ಮತ್ತು ಪಾಯಿಂಟ್ 1 ನಲ್ಲಿ ಸಮತೋಲನ ಸ್ಥಿತಿ ಮತ್ತೆ ಕಾಣಿಸಿಕೊಳ್ಳುತ್ತದೆ.