ಆವರ್ತನದೊಂದಿಗೆ ಪಂಪ್ ಘಟಕಗಳ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್
 ಕೇಂದ್ರಾಪಗಾಮಿ ಪಂಪ್ಗಳ ಕಾರ್ಯಾಚರಣಾ ವಿಧಾನಗಳು ತಮ್ಮ ಚಕ್ರಗಳ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಸರಿಹೊಂದಿಸಲು ಹೆಚ್ಚು ಶಕ್ತಿಯ ಸಮರ್ಥವಾಗಿವೆ. ಹೊಂದಾಣಿಕೆಯ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಅನ್ನು ಡ್ರೈವ್ ಮೋಟರ್ ಆಗಿ ಬಳಸಿದರೆ ಚಕ್ರಗಳ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಬದಲಾಯಿಸಬಹುದು.
ಕೇಂದ್ರಾಪಗಾಮಿ ಪಂಪ್ಗಳ ಕಾರ್ಯಾಚರಣಾ ವಿಧಾನಗಳು ತಮ್ಮ ಚಕ್ರಗಳ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಸರಿಹೊಂದಿಸಲು ಹೆಚ್ಚು ಶಕ್ತಿಯ ಸಮರ್ಥವಾಗಿವೆ. ಹೊಂದಾಣಿಕೆಯ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಅನ್ನು ಡ್ರೈವ್ ಮೋಟರ್ ಆಗಿ ಬಳಸಿದರೆ ಚಕ್ರಗಳ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಬದಲಾಯಿಸಬಹುದು.
ಗ್ಯಾಸ್ ಟರ್ಬೈನ್ಗಳು ಮತ್ತು ಆಂತರಿಕ ದಹನಕಾರಿ ಎಂಜಿನ್ಗಳ ವಿನ್ಯಾಸ ಮತ್ತು ಗುಣಲಕ್ಷಣಗಳು ಅಗತ್ಯವಿರುವ ವ್ಯಾಪ್ತಿಯೊಳಗೆ ತಿರುಗುವಿಕೆಯ ವೇಗದಲ್ಲಿ ಬದಲಾವಣೆಯನ್ನು ಒದಗಿಸುತ್ತವೆ.
ಪ್ರತಿ ಯಾಂತ್ರಿಕತೆಯ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಸರಿಹೊಂದಿಸುವ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಸಾಧನದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಅನುಕೂಲಕರವಾಗಿ ವಿಶ್ಲೇಷಿಸಲಾಗುತ್ತದೆ.
ಪಂಪ್ ಮತ್ತು ವಿದ್ಯುತ್ ಮೋಟರ್ ಅನ್ನು ಒಳಗೊಂಡಿರುವ ಪಂಪ್ ಮಾಡುವ ಘಟಕದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಪರಿಗಣಿಸಿ. ಅಂಜೂರದಲ್ಲಿ. 1 ಚೆಕ್ ವಾಲ್ವ್ (ಕರ್ವ್ 1) ಮತ್ತು ಅಳಿಲು-ಕೇಜ್ ರೋಟರ್ (ಕರ್ವ್ 2) ನೊಂದಿಗೆ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ ಹೊಂದಿದ ಕೇಂದ್ರಾಪಗಾಮಿ ಪಂಪ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ತೋರಿಸುತ್ತದೆ.
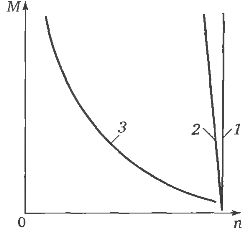
ಅಕ್ಕಿ. 1. ಪಂಪಿಂಗ್ ಘಟಕದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು
ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಟಾರ್ಕ್ ಮೌಲ್ಯಗಳು ಮತ್ತು ಪಂಪ್ನ ಪ್ರತಿರೋಧ ಟಾರ್ಕ್ ನಡುವಿನ ವ್ಯತ್ಯಾಸವನ್ನು ಡೈನಾಮಿಕ್ ಟಾರ್ಕ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.ಮೋಟರ್ನ ಟಾರ್ಕ್ ಪಂಪ್ನ ಪ್ರತಿರೋಧದ ಕ್ಷಣಕ್ಕಿಂತ ಹೆಚ್ಚಿದ್ದರೆ, ಡೈನಾಮಿಕ್ ಟಾರ್ಕ್ ಅನ್ನು ಧನಾತ್ಮಕವಾಗಿ ಪರಿಗಣಿಸಲಾಗುತ್ತದೆ, ಅದು ಕಡಿಮೆಯಿದ್ದರೆ, ಅದು ಋಣಾತ್ಮಕವಾಗಿರುತ್ತದೆ.
ಧನಾತ್ಮಕ ಡೈನಾಮಿಕ್ ಕ್ಷಣದ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ, ಪಂಪ್ ಘಟಕವು ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ಕೆಲಸ ಮಾಡಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ, ಅಂದರೆ. ವೇಗವನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ. ಡೈನಾಮಿಕ್ ಟಾರ್ಕ್ ಋಣಾತ್ಮಕವಾಗಿದ್ದರೆ, ಪಂಪ್ ಘಟಕವು ವಿಳಂಬದೊಂದಿಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಅಂದರೆ. ನಿಧಾನಗೊಳಿಸು.
ಈ ಕ್ಷಣಗಳು ಸಮಾನವಾದಾಗ, ಸ್ಥಾಯಿ ಕಾರ್ಯಾಚರಣೆಯ ವಿಧಾನವು ನಡೆಯುತ್ತದೆ, ಅಂದರೆ. ಪಂಪ್ ಘಟಕವು ಸ್ಥಿರ ವೇಗದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಈ ವೇಗ ಮತ್ತು ಅನುಗುಣವಾದ ಟಾರ್ಕ್ ಅನ್ನು ವಿದ್ಯುತ್ ಮೋಟರ್ ಮತ್ತು ಪಂಪ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳ ಛೇದಕದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ (ಅಂಜೂರ 1 ರಲ್ಲಿ ಪಾಯಿಂಟ್ a).
ಒಂದು ರೀತಿಯಲ್ಲಿ ಅಥವಾ ಇನ್ನೊಂದರಲ್ಲಿ ಹೊಂದಾಣಿಕೆಯ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣವು ಬದಲಾಗಿದರೆ, ಉದಾಹರಣೆಗೆ, ವಿದ್ಯುತ್ ಮೋಟರ್ನ ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಹೆಚ್ಚುವರಿ ಪ್ರತಿರೋಧಕವನ್ನು ಪರಿಚಯಿಸುವ ಮೂಲಕ ಮೃದುವಾಗಲು (ಚಿತ್ರ 1 ರಲ್ಲಿ ಕರ್ವ್ 3), ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಟಾರ್ಕ್ ಪ್ರತಿರೋಧದ ಕ್ಷಣದಲ್ಲಿ ಚಿಕ್ಕದಾಗುತ್ತದೆ.
ನಕಾರಾತ್ಮಕ ಡೈನಾಮಿಕ್ ಟಾರ್ಕ್ನ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ, ಪಂಪ್ ಘಟಕವು ವಿಳಂಬದೊಂದಿಗೆ ಕೆಲಸ ಮಾಡಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ, ಅಂದರೆ. ಟಾರ್ಕ್ ಮತ್ತು ಪ್ರತಿರೋಧದ ಕ್ಷಣ ಸಮತೋಲನವನ್ನು ಮತ್ತೆ ತನಕ ನಿಧಾನಗೊಳಿಸುತ್ತದೆ (ಅಂಜೂರ 1 ರಲ್ಲಿ ಪಾಯಿಂಟ್ ಬಿ). ಈ ಹಂತವು ವೇಗ ಮತ್ತು ಟಾರ್ಕ್ನ ಐಜೆನ್ವಾಲ್ಯೂಗೆ ಅನುರೂಪವಾಗಿದೆ.
ಹೀಗಾಗಿ, ಪಂಪ್ ಮಾಡುವ ಘಟಕದ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ನಿಯಂತ್ರಿಸುವ ಪ್ರಕ್ರಿಯೆಯು ನಿರಂತರವಾಗಿ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಟಾರ್ಕ್ನಲ್ಲಿನ ಬದಲಾವಣೆಗಳು ಮತ್ತು ಪಂಪ್ನ ಪ್ರತಿರೋಧದ ಕ್ಷಣದೊಂದಿಗೆ ಇರುತ್ತದೆ.
ಪಂಪ್ಗೆ ಕಟ್ಟುನಿಟ್ಟಾಗಿ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ನ ವೇಗವನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಅಥವಾ ಪಂಪ್ ಅನ್ನು ವಿದ್ಯುತ್ ಮೋಟರ್ಗೆ ಸಂಪರ್ಕಿಸುವ ಪ್ರಸರಣದ ಗೇರ್ ಅನುಪಾತವನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಪಂಪ್ ವೇಗದ ನಿಯಂತ್ರಣವನ್ನು ಮಾಡಬಹುದು, ಇದು ಸ್ಥಿರ ವೇಗದಲ್ಲಿ ಚಲಿಸುತ್ತದೆ.

ವಿದ್ಯುತ್ ಮೋಟಾರುಗಳ ತಿರುಗುವಿಕೆಯ ವೇಗದ ನಿಯಂತ್ರಣ
ಎಸಿ ಮೋಟಾರ್ಗಳನ್ನು ಮುಖ್ಯವಾಗಿ ಪಂಪ್ ಮಾಡುವ ಘಟಕಗಳಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ. AC ಮೋಟರ್ನ ತಿರುಗುವಿಕೆಯ ವೇಗವು ಪೂರೈಕೆಯ ಪ್ರವಾಹದ ಆವರ್ತನವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ f, ಪೋಲ್ ಜೋಡಿಗಳ ಸಂಖ್ಯೆ p ಮತ್ತು ಸ್ಲಿಪ್ s. ಈ ನಿಯತಾಂಕಗಳಲ್ಲಿ ಒಂದು ಅಥವಾ ಹೆಚ್ಚಿನದನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ, ನೀವು ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ ಮತ್ತು ಅದರೊಂದಿಗೆ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಪಂಪ್ನ ವೇಗವನ್ನು ಬದಲಾಯಿಸಬಹುದು.
ಆವರ್ತನ ವಿದ್ಯುತ್ ಡ್ರೈವ್ನ ಮುಖ್ಯ ಅಂಶವಾಗಿದೆ ಆವರ್ತನ ಪರಿವರ್ತಕ… ಇನ್ವರ್ಟರ್ ಸ್ಥಿರ ಗ್ರಿಡ್ ಆವರ್ತನ f1 ಅನ್ನು ವೇರಿಯೇಬಲ್ e2 ಆಗಿ ಪರಿವರ್ತಿಸುತ್ತದೆ. ಆವರ್ತನ e2 ಗೆ ಅನುಗುಣವಾಗಿ ಪರಿವರ್ತಕದ ಔಟ್ಪುಟ್ಗೆ ಸಂಪರ್ಕಗೊಂಡಿರುವ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ವೇಗವನ್ನು ಬದಲಾಯಿಸುತ್ತದೆ.
ಆವರ್ತನ ಪರಿವರ್ತಕದೊಂದಿಗೆ, ಮುಖ್ಯ ವೋಲ್ಟೇಜ್ U1 ಮತ್ತು ಆವರ್ತನವು ಪ್ರಾಯೋಗಿಕವಾಗಿ ಬದಲಾಗುವುದಿಲ್ಲ f1 ಅನ್ನು ವೇರಿಯಬಲ್ ನಿಯತಾಂಕಗಳಾಗಿ ಪರಿವರ್ತಿಸಲಾಗುತ್ತದೆ U2 ಮತ್ತು e2 ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಗೆ ಅವಶ್ಯಕ. ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ನ ಸ್ಥಿರ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು, ಪ್ರಸ್ತುತ ಮತ್ತು ಕಾಂತೀಯ ಹರಿವಿನ ಪರಿಭಾಷೆಯಲ್ಲಿ ಅದರ ಓವರ್ಲೋಡ್ ಅನ್ನು ಮಿತಿಗೊಳಿಸಲು, ಆವರ್ತನ ಪರಿವರ್ತಕದಲ್ಲಿ ಹೆಚ್ಚಿನ ಶಕ್ತಿಯ ಸೂಚಕಗಳನ್ನು ನಿರ್ವಹಿಸಲು, ಅದರ ಪ್ರಕಾರವನ್ನು ಅವಲಂಬಿಸಿ ಅದರ ಇನ್ಪುಟ್ ಮತ್ತು ಔಟ್ಪುಟ್ ನಿಯತಾಂಕಗಳ ನಡುವಿನ ನಿರ್ದಿಷ್ಟ ಅನುಪಾತವನ್ನು ನಿರ್ವಹಿಸಬೇಕು. ಯಾಂತ್ರಿಕ ಪಂಪ್ ಗುಣಲಕ್ಷಣಗಳು. ಈ ಸಂಬಂಧಗಳನ್ನು ಆವರ್ತನ ನಿಯಂತ್ರಣ ಕಾನೂನು ಸಮೀಕರಣದಿಂದ ಪಡೆಯಲಾಗಿದೆ.
ಪಂಪ್ಗಳಿಗಾಗಿ, ಅನುಪಾತವನ್ನು ಗಮನಿಸಬೇಕು:
U1 / f1 = U2 / f2 = const
ಅಂಜೂರದಲ್ಲಿ. ಆವರ್ತನ ನಿಯಂತ್ರಣದೊಂದಿಗೆ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು 2 ತೋರಿಸುತ್ತದೆ.ಆವರ್ತನ f2 ಕಡಿಮೆಯಾದಂತೆ, ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣವು n — M ನಿರ್ದೇಶಾಂಕಗಳಲ್ಲಿ ಅದರ ಸ್ಥಾನವನ್ನು ಬದಲಾಯಿಸುವುದಿಲ್ಲ, ಆದರೆ ಸ್ವಲ್ಪ ಮಟ್ಟಿಗೆ ಅದರ ಆಕಾರವನ್ನು ಬದಲಾಯಿಸುತ್ತದೆ. ನಿರ್ದಿಷ್ಟವಾಗಿ, ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಗರಿಷ್ಠ ಟಾರ್ಕ್ ಕಡಿಮೆಯಾಗುತ್ತದೆ. ಇದು U1 / f1 = U2 / f2 = const ನ ಅನುಪಾತದೊಂದಿಗೆ ಮತ್ತು ಆವರ್ತನ f1 ನಲ್ಲಿನ ಬದಲಾವಣೆಯು ಮೋಟಾರ್ ಟಾರ್ಕ್ನ ಪ್ರಮಾಣದಲ್ಲಿ ಸ್ಟೇಟರ್ನ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧದ ಪರಿಣಾಮವನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುವುದಿಲ್ಲ ಎಂಬ ಅಂಶದಿಂದಾಗಿ.

ಅಕ್ಕಿ. 2. ಗರಿಷ್ಠ (1) ಮತ್ತು ಕಡಿಮೆ (2) ಆವರ್ತನಗಳಲ್ಲಿ ಆವರ್ತನ ವಿದ್ಯುತ್ ಡ್ರೈವ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು
ಆವರ್ತನವನ್ನು ಸರಿಹೊಂದಿಸುವಾಗ, ಈ ಪ್ರಭಾವವನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಂಡು, ಗರಿಷ್ಠ ಟಾರ್ಕ್ ಬದಲಾಗದೆ ಉಳಿಯುತ್ತದೆ, ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣದ ಆಕಾರವನ್ನು ಸಂರಕ್ಷಿಸಲಾಗಿದೆ, ಅದರ ಸ್ಥಾನ ಮಾತ್ರ ಬದಲಾಗುತ್ತದೆ.
ಇದರೊಂದಿಗೆ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು ನಾಡಿ ಅಗಲ ಮಾಡ್ಯುಲೇಶನ್ (PWM) ಸೈನುಸೈಡಲ್ ಅನ್ನು ಸಮೀಪಿಸುವ ಪ್ರಸ್ತುತ ಮತ್ತು ವೋಲ್ಟೇಜ್ ವಕ್ರಾಕೃತಿಗಳ ಆಕಾರವನ್ನು ಪರಿವರ್ತಕದ ಔಟ್ಪುಟ್ನಲ್ಲಿ ಒದಗಿಸಲಾಗುತ್ತದೆ ಎಂಬ ಅಂಶದಿಂದಾಗಿ ಹೆಚ್ಚಿನ ಶಕ್ತಿ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೊಂದಿವೆ. ಇತ್ತೀಚೆಗೆ, IGBT ಮಾಡ್ಯೂಲ್ಗಳನ್ನು ಆಧರಿಸಿದ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು (ಇನ್ಸುಲೇಟೆಡ್ ಗೇಟ್ ಬೈಪೋಲಾರ್ ಟ್ರಾನ್ಸಿಸ್ಟರ್ಗಳು) ಹೆಚ್ಚು ವ್ಯಾಪಕವಾಗಿವೆ.
IGBT ಮಾಡ್ಯೂಲ್ ಹೆಚ್ಚಿನ ದಕ್ಷತೆಯ ಪ್ರಮುಖ ಅಂಶವಾಗಿದೆ. ಇದು ಕಡಿಮೆ ವೋಲ್ಟೇಜ್ ಡ್ರಾಪ್, ಹೆಚ್ಚಿನ ವೇಗ ಮತ್ತು ಕಡಿಮೆ ಸ್ವಿಚಿಂಗ್ ಪವರ್ ಅನ್ನು ಒಳಗೊಂಡಿದೆ. Asynchronous ಮೋಟಾರ್ ಅನ್ನು ನಿಯಂತ್ರಿಸಲು PWM ಮತ್ತು ವೆಕ್ಟರ್ ಅಲ್ಗಾರಿದಮ್ನೊಂದಿಗೆ IGBT ಮಾಡ್ಯೂಲ್ಗಳನ್ನು ಆಧರಿಸಿದ ಆವರ್ತನ ಪರಿವರ್ತಕವು ಇತರ ರೀತಿಯ ಪರಿವರ್ತಕಗಳಿಗಿಂತ ಪ್ರಯೋಜನಗಳನ್ನು ಹೊಂದಿದೆ. ಇದು ಸಂಪೂರ್ಣ ಔಟ್ಪುಟ್ ಆವರ್ತನ ಶ್ರೇಣಿಯ ಮೇಲೆ ಹೆಚ್ಚಿನ ಶಕ್ತಿಯ ಅಂಶವನ್ನು ಹೊಂದಿದೆ.
ಪರಿವರ್ತಕದ ಸ್ಕೀಮ್ಯಾಟಿಕ್ ರೇಖಾಚಿತ್ರವನ್ನು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 3.
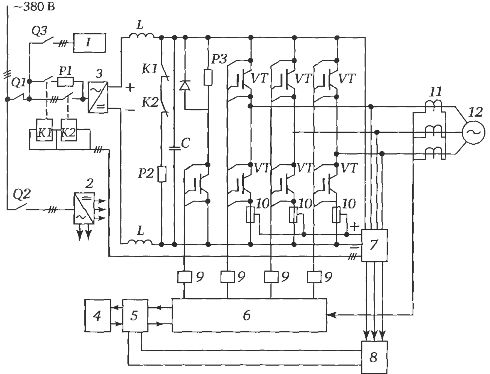
ಅಕ್ಕಿ. 3.IGBT ಮಾಡ್ಯೂಲ್ಗಳ ಆವರ್ತನ ಪರಿವರ್ತಕದ ಯೋಜನೆ: 1 - ಅಭಿಮಾನಿಗಳ ಬ್ಲಾಕ್; 2 - ವಿದ್ಯುತ್ ಸರಬರಾಜು; 3 - ಅನಿಯಂತ್ರಿತ ರಿಕ್ಟಿಫೈಯರ್; 4 - ನಿಯಂತ್ರಣ ಫಲಕ; 5 - ನಿಯಂತ್ರಣ ಫಲಕ ಬೋರ್ಡ್; 6 - PWM; 7 - ವೋಲ್ಟೇಜ್ ಪರಿವರ್ತನೆ ಘಟಕ; 8 - ಸಿಸ್ಟಮ್ ನಿಯಂತ್ರಣ ಮಂಡಳಿ; 9 - ಚಾಲಕರು; 10 - ಇನ್ವರ್ಟರ್ ಘಟಕಕ್ಕೆ ಫ್ಯೂಸ್ಗಳು; 11 - ಪ್ರಸ್ತುತ ಸಂವೇದಕಗಳು; 12 - ಅಸಮಕಾಲಿಕ ಅಳಿಲು-ಕೇಜ್ ಮೋಟಾರ್; Q1, Q2, Q3 - ಪವರ್ ಸರ್ಕ್ಯೂಟ್, ಕಂಟ್ರೋಲ್ ಸರ್ಕ್ಯೂಟ್ ಮತ್ತು ಫ್ಯಾನ್ ಯೂನಿಟ್ಗಾಗಿ ಸ್ವಿಚ್ಗಳು; ಕೆ 1, ಕೆ 2 - ಕೆಪಾಸಿಟರ್ಗಳು ಮತ್ತು ಪವರ್ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಚಾರ್ಜ್ ಮಾಡಲು ಸಂಪರ್ಕಕಾರರು; ಸಿ - ಕೆಪಾಸಿಟರ್ ಬ್ಯಾಂಕ್; ಆರ್ಎಲ್, ಆರ್ 2, ಆರ್ 3 - ಕೆಪಾಸಿಟರ್ ಚಾರ್ಜ್ನ ಪ್ರವಾಹವನ್ನು ಸೀಮಿತಗೊಳಿಸುವ ಪ್ರತಿರೋಧಕಗಳು, ಕೆಪಾಸಿಟರ್ಗಳ ಡಿಸ್ಚಾರ್ಜ್ ಮತ್ತು ಡ್ರೈನ್ ಬ್ಲಾಕ್; ವಿಟಿ - ಇನ್ವರ್ಟರ್ ಪವರ್ ಸ್ವಿಚ್ಗಳು (ಐಜಿಬಿಟಿ ಮಾಡ್ಯೂಲ್ಗಳು)
ಆವರ್ತನ ಪರಿವರ್ತಕದ ಔಟ್ಪುಟ್ನಲ್ಲಿ, ವೋಲ್ಟೇಜ್ (ಪ್ರಸ್ತುತ) ಕರ್ವ್ ರಚನೆಯಾಗುತ್ತದೆ, ಸೈನುಸಾಯ್ಡ್ನಿಂದ ಸ್ವಲ್ಪ ವಿಭಿನ್ನವಾಗಿದೆ, ಹೆಚ್ಚಿನ ಹಾರ್ಮೋನಿಕ್ ಘಟಕಗಳನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಅವರ ಉಪಸ್ಥಿತಿಯು ವಿದ್ಯುತ್ ಮೋಟರ್ನಲ್ಲಿನ ನಷ್ಟಗಳ ಹೆಚ್ಚಳಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ. ಈ ಕಾರಣಕ್ಕಾಗಿ, ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ದರದ ವೇಗಕ್ಕೆ ಸಮೀಪವಿರುವ ವೇಗದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸಿದಾಗ, ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ ಓವರ್ಲೋಡ್ ಆಗಿದೆ.
ಕಡಿಮೆ ವೇಗದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವಾಗ, ಪಂಪ್ ಡ್ರೈವ್ಗಳಲ್ಲಿ ಬಳಸುವ ಸ್ವಯಂ-ಗಾಳಿ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳಿಗೆ ತಂಪಾಗಿಸುವ ಪರಿಸ್ಥಿತಿಗಳು ಹದಗೆಡುತ್ತವೆ. ಪಂಪಿಂಗ್ ಘಟಕಗಳ ಸಾಮಾನ್ಯ ನಿಯಂತ್ರಣ ವ್ಯಾಪ್ತಿಯಲ್ಲಿ (1: 2 ಅಥವಾ 1: 3), ವಾತಾಯನ ಪರಿಸ್ಥಿತಿಗಳ ಈ ಕ್ಷೀಣಿಸುವಿಕೆಯು ಹರಿವಿನ ಪ್ರಮಾಣ ಮತ್ತು ಪಂಪ್ ಹೆಡ್ನಲ್ಲಿನ ಕಡಿತದಿಂದಾಗಿ ಲೋಡ್ನಲ್ಲಿ ಗಮನಾರ್ಹವಾದ ಕಡಿತದಿಂದ ಸರಿದೂಗಿಸಲ್ಪಡುತ್ತದೆ.
ನಾಮಮಾತ್ರ ಮೌಲ್ಯಕ್ಕೆ (50 Hz) ಸಮೀಪವಿರುವ ಆವರ್ತನಗಳಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವಾಗ, ಹೆಚ್ಚಿನ ಆದೇಶದ ಹಾರ್ಮೋನಿಕ್ಸ್ನ ಸಂಯೋಜನೆಯೊಂದಿಗೆ ತಂಪಾಗಿಸುವ ಪರಿಸ್ಥಿತಿಗಳ ಕ್ಷೀಣಿಸುವಿಕೆಯು ಅನುಮತಿಸುವ ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯನ್ನು 8-15% ರಷ್ಟು ಕಡಿಮೆ ಮಾಡುವ ಅಗತ್ಯವಿದೆ.ಈ ಕಾರಣದಿಂದಾಗಿ, ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಗರಿಷ್ಠ ಟಾರ್ಕ್ 1 - 2%, ಅದರ ದಕ್ಷತೆ - 1 - 4%, cosφ - 5-7% ರಷ್ಟು ಕಡಿಮೆಯಾಗುತ್ತದೆ.
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ ಅನ್ನು ಓವರ್ಲೋಡ್ ಮಾಡುವುದನ್ನು ತಪ್ಪಿಸಲು, ಅದರ ವೇಗದ ಮೇಲಿನ ಮೌಲ್ಯವನ್ನು ಮಿತಿಗೊಳಿಸಲು ಅಥವಾ ಹೆಚ್ಚು ಶಕ್ತಿಯುತವಾದ ವಿದ್ಯುತ್ ಮೋಟರ್ನೊಂದಿಗೆ ಡ್ರೈವ್ ಅನ್ನು ಸಜ್ಜುಗೊಳಿಸಲು ಇದು ಅಗತ್ಯವಾಗಿರುತ್ತದೆ. ಪಂಪಿಂಗ್ ಘಟಕವು e2> 50 Hz ಆವರ್ತನದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸಲು ವಿನ್ಯಾಸಗೊಳಿಸಿದಾಗ ಕೊನೆಯ ಅಳತೆ ಕಡ್ಡಾಯವಾಗಿದೆ. ಇಂಜಿನ್ ಕ್ರಾಂತಿಗಳ ಮೇಲಿನ ಮೌಲ್ಯವನ್ನು ಸೀಮಿತಗೊಳಿಸುವುದು ಆವರ್ತನ e2 ಅನ್ನು 48 Hz ಗೆ ಸೀಮಿತಗೊಳಿಸುವ ಮೂಲಕ ಮಾಡಲಾಗುತ್ತದೆ. ಡ್ರೈವ್ ಮೋಟರ್ನ ರೇಟ್ ಮಾಡಲಾದ ಶಕ್ತಿಯ ಹೆಚ್ಚಳವು ಹತ್ತಿರದ ಪ್ರಮಾಣಿತ ಮೌಲ್ಯಕ್ಕೆ ದುಂಡಾಗಿರುತ್ತದೆ.

ವೇರಿಯಬಲ್ ಎಲೆಕ್ಟ್ರಿಕ್ ಬ್ಲಾಕ್ ಡ್ರೈವ್ಗಳ ಗುಂಪು ನಿಯಂತ್ರಣ
ಅನೇಕ ಪಂಪ್ ಸೆಟ್ಗಳು ಹಲವಾರು ಬ್ಲಾಕ್ಗಳನ್ನು ಒಳಗೊಂಡಿರುತ್ತವೆ. ನಿಯಮದಂತೆ, ಎಲ್ಲಾ ಘಟಕಗಳು ಹೊಂದಾಣಿಕೆಯ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಅನ್ನು ಹೊಂದಿಲ್ಲ. ಎರಡು ಅಥವಾ ಮೂರು ಸ್ಥಾಪಿಸಲಾದ ಘಟಕಗಳಿಂದ, ಹೊಂದಾಣಿಕೆಯ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವಿನೊಂದಿಗೆ ಒಂದನ್ನು ಸಜ್ಜುಗೊಳಿಸಲು ಸಾಕು. ಪರಿವರ್ತಕವು ಘಟಕಗಳಲ್ಲಿ ಒಂದಕ್ಕೆ ಶಾಶ್ವತವಾಗಿ ಸಂಪರ್ಕಗೊಂಡಿದ್ದರೆ, ಅವುಗಳ ಮೋಟಾರು ಸಂಪನ್ಮೂಲದ ಅಸಮ ಬಳಕೆ ಇರುತ್ತದೆ, ಏಕೆಂದರೆ ವೇರಿಯಬಲ್ ಸ್ಪೀಡ್ ಡ್ರೈವ್ ಹೊಂದಿದ ಘಟಕವನ್ನು ಹೆಚ್ಚು ಸಮಯ ಬಳಸಲಾಗುತ್ತದೆ.
ನಿಲ್ದಾಣದಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾದ ಎಲ್ಲಾ ಬ್ಲಾಕ್ಗಳ ನಡುವೆ ಲೋಡ್ನ ಏಕರೂಪದ ವಿತರಣೆಗಾಗಿ, ಗುಂಪು ನಿಯಂತ್ರಣ ಕೇಂದ್ರಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಲಾಗಿದೆ, ಅದರ ಸಹಾಯದಿಂದ ಬ್ಲಾಕ್ಗಳನ್ನು ಪರಿವರ್ತಕಕ್ಕೆ ಸರಣಿಯಲ್ಲಿ ಸಂಪರ್ಕಿಸಬಹುದು. ನಿಯಂತ್ರಣ ಕೇಂದ್ರಗಳನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಕಡಿಮೆ ವೋಲ್ಟೇಜ್ ಘಟಕಗಳಿಗೆ (380 V) ತಯಾರಿಸಲಾಗುತ್ತದೆ.
ವಿಶಿಷ್ಟವಾಗಿ, ಕಡಿಮೆ ವೋಲ್ಟೇಜ್ ನಿಯಂತ್ರಣ ಕೇಂದ್ರಗಳನ್ನು ಎರಡು ಅಥವಾ ಮೂರು ಘಟಕಗಳನ್ನು ನಿಯಂತ್ರಿಸಲು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ.ಕಡಿಮೆ-ವೋಲ್ಟೇಜ್ ನಿಯಂತ್ರಣ ಕೇಂದ್ರಗಳು ಸರ್ಕ್ಯೂಟ್ ಬ್ರೇಕರ್ಗಳನ್ನು ಒಳಗೊಂಡಿರುತ್ತವೆ, ಅದು ಹಂತ-ಹಂತದ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ ಮತ್ತು ಗ್ರೌಂಡಿಂಗ್ ವಿರುದ್ಧ ರಕ್ಷಣೆ ನೀಡುತ್ತದೆ, ಓವರ್ಲೋಡ್ನಿಂದ ಸಾಧನಗಳನ್ನು ರಕ್ಷಿಸಲು ಥರ್ಮಲ್ ರಿಲೇಗಳು, ಹಾಗೆಯೇ ನಿಯಂತ್ರಣ ಉಪಕರಣಗಳು (ಸ್ವಿಚ್ಗಳು, ಬಟನ್ ಪೋಸ್ಟ್ಗಳು ಮತ್ತು ಇತರರು.).
ನಿಯಂತ್ರಣ ಕೇಂದ್ರದ ಸ್ವಿಚಿಂಗ್ ಸರ್ಕ್ಯೂಟ್ ಅಗತ್ಯವಾದ ಇಂಟರ್ಲಾಕ್ಗಳನ್ನು ಒಳಗೊಂಡಿದೆ, ಅದು ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಯಾವುದೇ ಆಯ್ದ ಬ್ಲಾಕ್ಗೆ ಸಂಪರ್ಕಿಸಲು ಮತ್ತು ಪಂಪಿಂಗ್ ಅಥವಾ ಊದುವ ಘಟಕದ ತಾಂತ್ರಿಕ ಕಾರ್ಯಾಚರಣೆಯ ವಿಧಾನವನ್ನು ತೊಂದರೆಯಾಗದಂತೆ ವರ್ಕಿಂಗ್ ಬ್ಲಾಕ್ಗಳನ್ನು ಬದಲಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ.
ನಿಯಂತ್ರಣ ಕೇಂದ್ರಗಳು, ನಿಯಮದಂತೆ, ವಿದ್ಯುತ್ ಅಂಶಗಳೊಂದಿಗೆ (ಸ್ವಯಂಚಾಲಿತ ಸ್ವಿಚ್ಗಳು, ಸಂಪರ್ಕಕಾರರು, ಇತ್ಯಾದಿ) ನಿಯಂತ್ರಣ ಮತ್ತು ನಿಯಂತ್ರಣ ಸಾಧನಗಳನ್ನು (ಮೈಕ್ರೊಪ್ರೊಸೆಸರ್ ನಿಯಂತ್ರಕಗಳು, ಇತ್ಯಾದಿ) ಒಳಗೊಂಡಿರುತ್ತವೆ.
ಗ್ರಾಹಕರ ಕೋರಿಕೆಯ ಮೇರೆಗೆ, ಬ್ಯಾಕ್ಅಪ್ ಪವರ್ (ಎಟಿಎಸ್) ಸ್ವಯಂಚಾಲಿತ ಸ್ವಿಚಿಂಗ್ ಆನ್ ಮಾಡಲು, ಸೇವಿಸಿದ ವಿದ್ಯುತ್ನ ವಾಣಿಜ್ಯ ಮಾಪನ, ಸ್ಥಗಿತಗೊಳಿಸುವ ಉಪಕರಣಗಳ ನಿಯಂತ್ರಣಕ್ಕಾಗಿ ಕೇಂದ್ರಗಳು ಸಾಧನಗಳನ್ನು ಹೊಂದಿವೆ.
ಅಗತ್ಯವಿದ್ದರೆ, ಹೆಚ್ಚುವರಿ ಸಾಧನಗಳನ್ನು ನಿಯಂತ್ರಣ ಕೇಂದ್ರಕ್ಕೆ ಪರಿಚಯಿಸಲಾಗುತ್ತದೆ, ಇದು ಘಟಕಗಳ ಸಾಫ್ಟ್ ಸ್ಟಾರ್ಟರ್ನ ಆವರ್ತನ ಪರಿವರ್ತಕದೊಂದಿಗೆ ಬಳಕೆಯನ್ನು ಖಚಿತಪಡಿಸುತ್ತದೆ.
ಸ್ವಯಂಚಾಲಿತ ನಿಯಂತ್ರಣ ಕೇಂದ್ರಗಳು ಒದಗಿಸುತ್ತವೆ:
-
ತಾಂತ್ರಿಕ ನಿಯತಾಂಕದ ಸೆಟ್ ಮೌಲ್ಯವನ್ನು ನಿರ್ವಹಿಸುವುದು (ಒತ್ತಡ, ಮಟ್ಟ, ತಾಪಮಾನ, ಇತ್ಯಾದಿ);
-
ನಿಯಂತ್ರಿತ ಮತ್ತು ನಿಯಂತ್ರಿತ ಘಟಕಗಳ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ಗಳ ಕಾರ್ಯಾಚರಣಾ ವಿಧಾನಗಳ ನಿಯಂತ್ರಣ (ಸೇವಿಸುವ ಪ್ರಸ್ತುತ, ಶಕ್ತಿಯ ನಿಯಂತ್ರಣ) ಮತ್ತು ಅವುಗಳ ರಕ್ಷಣೆ;
-
ಮುಖ್ಯ ಸಾಧನದ ವೈಫಲ್ಯದ ಸಂದರ್ಭದಲ್ಲಿ ಬ್ಯಾಕಪ್ ಸಾಧನದ ಸ್ವಯಂಚಾಲಿತ ಪ್ರಾರಂಭ;
-
ಆವರ್ತನ ಪರಿವರ್ತಕದ ವೈಫಲ್ಯದ ಸಂದರ್ಭದಲ್ಲಿ ಬ್ಲಾಕ್ಗಳನ್ನು ನೇರವಾಗಿ ನೆಟ್ವರ್ಕ್ಗೆ ಬದಲಾಯಿಸುವುದು;
-
ಬ್ಯಾಕಪ್ (ATS) ಎಲೆಕ್ಟ್ರಿಕಲ್ ಇನ್ಪುಟ್ನ ಸ್ವಯಂಚಾಲಿತ ಸ್ವಿಚಿಂಗ್;
-
ವಿದ್ಯುತ್ ಸರಬರಾಜು ನೆಟ್ವರ್ಕ್ನಲ್ಲಿ ನಷ್ಟ ಮತ್ತು ಆಳವಾದ ವೋಲ್ಟೇಜ್ ಹನಿಗಳ ನಂತರ ನಿಲ್ದಾಣದ ಸ್ವಯಂಚಾಲಿತ ಮರುಸಂಪರ್ಕ (AR);
-
ಒಂದು ನಿರ್ದಿಷ್ಟ ಸಮಯದಲ್ಲಿ ಕೆಲಸದ ಘಟಕಗಳನ್ನು ನಿಲ್ಲಿಸುವ ಮತ್ತು ಪ್ರಾರಂಭಿಸುವುದರೊಂದಿಗೆ ನಿಲ್ದಾಣದ ಕಾರ್ಯಾಚರಣೆಯ ಮೋಡ್ನ ಸ್ವಯಂಚಾಲಿತ ಬದಲಾವಣೆ;
-
ನಿಯಂತ್ರಿತ ಘಟಕವು ನಾಮಮಾತ್ರದ ವೇಗವನ್ನು ತಲುಪಿದರೆ, ಅಗತ್ಯ ನೀರು ಸರಬರಾಜನ್ನು ಒದಗಿಸದಿದ್ದರೆ ಹೆಚ್ಚುವರಿ ಅನಿಯಂತ್ರಿತ ಘಟಕದ ಸ್ವಯಂಚಾಲಿತ ಸಕ್ರಿಯಗೊಳಿಸುವಿಕೆ;
-
ಮೋಟಾರ್ ಸಂಪನ್ಮೂಲಗಳ ಏಕರೂಪದ ಬಳಕೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಕೆಲವು ಮಧ್ಯಂತರಗಳಲ್ಲಿ ಕೆಲಸದ ಬ್ಲಾಕ್ಗಳ ಸ್ವಯಂಚಾಲಿತ ಪರ್ಯಾಯ;
-
ನಿಯಂತ್ರಣ ಫಲಕದಿಂದ ಅಥವಾ ನಿಯಂತ್ರಣ ಫಲಕದಿಂದ ಪಂಪ್ ಮಾಡುವ (ಊದುವ) ಘಟಕದ ಕಾರ್ಯಾಚರಣೆಯ ಕ್ರಮದ ಕಾರ್ಯಾಚರಣೆಯ ನಿಯಂತ್ರಣ.
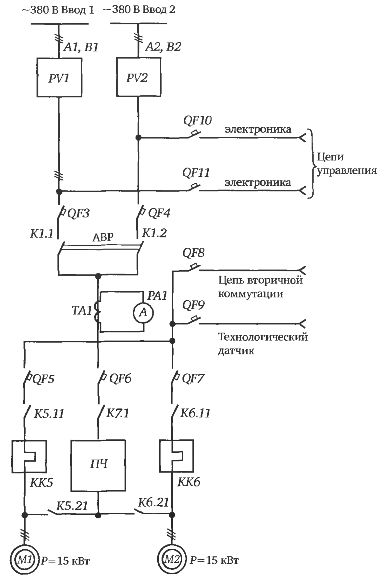
ಅಕ್ಕಿ. 4. ವೇರಿಯಬಲ್ ಆವರ್ತನ ಪಂಪ್ಗಳ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ಗಳ ಗುಂಪು ನಿಯಂತ್ರಣಕ್ಕಾಗಿ ನಿಲ್ದಾಣ
ಪಂಪ್ ಮಾಡುವ ಘಟಕಗಳಲ್ಲಿ ವೇರಿಯಬಲ್ ಆವರ್ತನವನ್ನು ಬಳಸುವ ದಕ್ಷತೆ
ವೇರಿಯಬಲ್ ಫ್ರೀಕ್ವೆನ್ಸಿ ಡ್ರೈವಿನ ಬಳಕೆಯು ಶಕ್ತಿಯನ್ನು ಗಮನಾರ್ಹವಾಗಿ ಉಳಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ, ಏಕೆಂದರೆ ಕಡಿಮೆ ಹರಿವಿನ ದರದಲ್ಲಿ ದೊಡ್ಡ ಪಂಪಿಂಗ್ ಘಟಕಗಳನ್ನು ಬಳಸಲು ಇದು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಇದಕ್ಕೆ ಧನ್ಯವಾದಗಳು, ಘಟಕಗಳ ಘಟಕ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೆಚ್ಚಿಸುವ ಮೂಲಕ, ಅವುಗಳ ಒಟ್ಟು ಸಂಖ್ಯೆಯನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಮತ್ತು ಅದರ ಪ್ರಕಾರ, ಕಟ್ಟಡಗಳ ಒಟ್ಟಾರೆ ಆಯಾಮಗಳನ್ನು ಕಡಿಮೆ ಮಾಡಲು, ನಿಲ್ದಾಣದ ಹೈಡ್ರಾಲಿಕ್ ಯೋಜನೆಯನ್ನು ಸರಳಗೊಳಿಸಲು ಮತ್ತು ಪೈಪ್ಲೈನ್ ಸಂಖ್ಯೆಯನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಸಾಧ್ಯವಿದೆ. ಕವಾಟಗಳು.
ಹೀಗಾಗಿ, ಪಂಪಿಂಗ್ ಘಟಕಗಳಲ್ಲಿ ಹೊಂದಾಣಿಕೆಯ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಬಳಕೆಯು ವಿದ್ಯುತ್ ಮತ್ತು ನೀರನ್ನು ಉಳಿಸುವುದರ ಜೊತೆಗೆ, ಪಂಪಿಂಗ್ ಘಟಕಗಳ ಸಂಖ್ಯೆಯನ್ನು ಕಡಿಮೆ ಮಾಡಲು, ನಿಲ್ದಾಣದ ಹೈಡ್ರಾಲಿಕ್ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಸರಳಗೊಳಿಸಲು ಮತ್ತು ಪಂಪಿಂಗ್ ಸ್ಟೇಷನ್ ಕಟ್ಟಡದ ನಿರ್ಮಾಣದ ಪರಿಮಾಣವನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಅನುಮತಿಸುತ್ತದೆ.ಈ ಸಂಬಂಧದಲ್ಲಿ, ದ್ವಿತೀಯ ಆರ್ಥಿಕ ಪರಿಣಾಮಗಳು ಉದ್ಭವಿಸುತ್ತವೆ: ಕಟ್ಟಡದ ತಾಪನ, ಬೆಳಕು ಮತ್ತು ದುರಸ್ತಿ ವೆಚ್ಚಗಳು ಕಡಿಮೆಯಾಗುತ್ತವೆ, ಕಡಿಮೆ ವೆಚ್ಚಗಳು, ನಿಲ್ದಾಣಗಳ ಉದ್ದೇಶ ಮತ್ತು ಇತರ ನಿರ್ದಿಷ್ಟ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಅವಲಂಬಿಸಿ, 20-50% ರಷ್ಟು ಕಡಿಮೆ ಮಾಡಬಹುದು.
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳಿಗೆ ತಾಂತ್ರಿಕ ದಸ್ತಾವೇಜನ್ನು ಪಂಪ್ ಮಾಡುವ ಘಟಕಗಳಲ್ಲಿ ಹೊಂದಾಣಿಕೆ ಮಾಡಬಹುದಾದ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವಿನ ಬಳಕೆಯು ಶುದ್ಧ ಮತ್ತು ತ್ಯಾಜ್ಯ ನೀರನ್ನು ಪಂಪ್ ಮಾಡಲು ಖರ್ಚು ಮಾಡಿದ ಶಕ್ತಿಯನ್ನು 50% ವರೆಗೆ ಉಳಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ ಮತ್ತು ಮರುಪಾವತಿ ಅವಧಿಯು ಮೂರರಿಂದ ಒಂಬತ್ತು ತಿಂಗಳವರೆಗೆ ಇರುತ್ತದೆ.
ಅದೇ ಸಮಯದಲ್ಲಿ, ಆಪರೇಟಿಂಗ್ ಪಂಪ್ ಘಟಕಗಳಲ್ಲಿ ನಿಯಂತ್ರಿತ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ನ ಪರಿಣಾಮಕಾರಿತ್ವದ ಲೆಕ್ಕಾಚಾರಗಳು ಮತ್ತು ವಿಶ್ಲೇಷಣೆಯು 75 kW ವರೆಗಿನ ಶಕ್ತಿಯೊಂದಿಗೆ ಘಟಕಗಳನ್ನು ಹೊಂದಿರುವ ಸಣ್ಣ ಪಂಪ್ ಘಟಕಗಳಿಗೆ, ವಿಶೇಷವಾಗಿ ಅವು ದೊಡ್ಡ ಸ್ಥಿರ ಒತ್ತಡದ ಘಟಕದೊಂದಿಗೆ ಕೆಲಸ ಮಾಡುವಾಗ, ಅದು ತಿರುಗುತ್ತದೆ ಎಂದು ತೋರಿಸುತ್ತದೆ. ನಿಯಂತ್ರಿತ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ಗಳನ್ನು ಬಳಸಲು ಸೂಕ್ತವಲ್ಲ. ಈ ಸಂದರ್ಭಗಳಲ್ಲಿ, ಥ್ರೊಟ್ಲಿಂಗ್ ಬಳಸಿ, ಕೆಲಸ ಮಾಡುವ ಪಂಪ್ ಘಟಕಗಳ ಸಂಖ್ಯೆಯನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ನೀವು ಸರಳವಾದ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಗಳನ್ನು ಬಳಸಬಹುದು.
ಪಂಪ್ ಯುನಿಟ್ ಯಾಂತ್ರೀಕೃತಗೊಂಡ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ವೇರಿಯಬಲ್ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಬಳಕೆಯು ಒಂದು ಕಡೆ ಶಕ್ತಿಯ ಬಳಕೆಯನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ಮತ್ತೊಂದೆಡೆ ಹೆಚ್ಚುವರಿ ಬಂಡವಾಳ ವೆಚ್ಚಗಳು ಬೇಕಾಗುತ್ತದೆ, ಆದ್ದರಿಂದ ಪಂಪ್ ಘಟಕಗಳಲ್ಲಿ ವೇರಿಯಬಲ್ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಅನ್ನು ಬಳಸುವ ಸಾಧ್ಯತೆಯನ್ನು ಕಡಿಮೆ ವೆಚ್ಚವನ್ನು ಹೋಲಿಸುವ ಮೂಲಕ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಎರಡು ಆಯ್ಕೆಗಳಲ್ಲಿ: ಮೂಲ ಮತ್ತು ಹೊಸದು. ಹೊಂದಾಣಿಕೆಯ ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಹೊಂದಿದ ಪಂಪಿಂಗ್ ಘಟಕವನ್ನು ಹೊಸ ಆಯ್ಕೆಯಾಗಿ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ ಮತ್ತು ಅದರ ಘಟಕಗಳು ಸ್ಥಿರ ವೇಗದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಘಟಕವನ್ನು ಮುಖ್ಯವಾಗಿ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ.