ಆವರ್ತನ ಪರಿವರ್ತಕ - ವಿಧಗಳು, ಕಾರ್ಯಾಚರಣೆಯ ತತ್ವ, ಸಂಪರ್ಕ ಯೋಜನೆಗಳು
 ಯಾವುದೇ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ರೋಟರ್ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಒಳಗೆ ತಿರುಗುವ ವಿದ್ಯುತ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರದಿಂದ ಉಂಟಾಗುವ ಬಲಗಳಿಂದ ನಡೆಸಲ್ಪಡುತ್ತದೆ. ಇದರ ವೇಗವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ವಿದ್ಯುತ್ ಗ್ರಿಡ್ನ ಕೈಗಾರಿಕಾ ಆವರ್ತನದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ.
ಯಾವುದೇ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ರೋಟರ್ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಒಳಗೆ ತಿರುಗುವ ವಿದ್ಯುತ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರದಿಂದ ಉಂಟಾಗುವ ಬಲಗಳಿಂದ ನಡೆಸಲ್ಪಡುತ್ತದೆ. ಇದರ ವೇಗವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ವಿದ್ಯುತ್ ಗ್ರಿಡ್ನ ಕೈಗಾರಿಕಾ ಆವರ್ತನದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ.
ಇದರ ಪ್ರಮಾಣಿತ ಮೌಲ್ಯ 50 ಹರ್ಟ್ಜ್ ಒಂದು ಸೆಕೆಂಡಿನಲ್ಲಿ ಐವತ್ತು ಆಂದೋಲನ ಅವಧಿಗಳನ್ನು ಸೂಚಿಸುತ್ತದೆ. ಒಂದು ನಿಮಿಷದಲ್ಲಿ, ಅವರ ಸಂಖ್ಯೆಯು 60 ಪಟ್ಟು ಹೆಚ್ಚಾಗುತ್ತದೆ ಮತ್ತು 50 × 60 = 3000 ಕ್ರಾಂತಿಗಳು. ಅನ್ವಯಿಕ ವಿದ್ಯುತ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ ರೋಟರ್ ಅದೇ ಸಂಖ್ಯೆಯ ಬಾರಿ ತಿರುಗುತ್ತದೆ.
ಸ್ಟೇಟರ್ಗೆ ಅನ್ವಯಿಸಲಾದ ಮುಖ್ಯ ಆವರ್ತನದ ಮೌಲ್ಯವನ್ನು ನೀವು ಬದಲಾಯಿಸಿದರೆ, ನೀವು ರೋಟರ್ನ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಮತ್ತು ಅದಕ್ಕೆ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಡ್ರೈವ್ ಅನ್ನು ಸರಿಹೊಂದಿಸಬಹುದು. ಈ ತತ್ವವು ವಿದ್ಯುತ್ ಮೋಟಾರುಗಳ ನಿಯಂತ್ರಣದ ಆಧಾರವಾಗಿದೆ.
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳ ವಿಧಗಳು
ವಿನ್ಯಾಸದ ಪ್ರಕಾರ, ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು:
1. ಇಂಡಕ್ಷನ್ ಪ್ರಕಾರ;
2. ಎಲೆಕ್ಟ್ರಾನಿಕ್.
ತಯಾರಿಸಿದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು ಹಂತದ ರೋಟರ್ನೊಂದಿಗೆ ಯೋಜನೆಯ ಪ್ರಕಾರ ಮತ್ತು ಜನರೇಟರ್ ಮೋಡ್ನಲ್ಲಿ ಪ್ರಾರಂಭವಾಯಿತು, ಮೊದಲ ವಿಧದ ಪ್ರತಿನಿಧಿಗಳು. ಕಾರ್ಯಾಚರಣೆಯ ಸಮಯದಲ್ಲಿ, ಅವುಗಳು ಕಡಿಮೆ ದಕ್ಷತೆಯನ್ನು ಹೊಂದಿರುತ್ತವೆ ಮತ್ತು ಕಡಿಮೆ ದಕ್ಷತೆಯಿಂದ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೊಂದಿವೆ.ಆದ್ದರಿಂದ, ಅವರು ಉತ್ಪಾದನೆಯಲ್ಲಿ ವ್ಯಾಪಕವಾದ ಅಪ್ಲಿಕೇಶನ್ ಅನ್ನು ಕಂಡುಕೊಂಡಿಲ್ಲ ಮತ್ತು ಅತ್ಯಂತ ವಿರಳವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
ಎಲೆಕ್ಟ್ರಾನಿಕ್ ಆವರ್ತನ ಪರಿವರ್ತನೆ ವಿಧಾನವು ಅಸಮಕಾಲಿಕ ಮತ್ತು ಸಿಂಕ್ರೊನಸ್ ಯಂತ್ರಗಳ ಸುಗಮ ವೇಗ ನಿಯಂತ್ರಣವನ್ನು ಅನುಮತಿಸುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಎರಡು ನಿಯಂತ್ರಣ ತತ್ವಗಳಲ್ಲಿ ಒಂದನ್ನು ಅನ್ವಯಿಸಬಹುದು:
1. ಆವರ್ತನ (V / f) ಮೇಲೆ ತಿರುಗುವಿಕೆಯ ವೇಗದ ಅವಲಂಬನೆಯ ಪೂರ್ವನಿರ್ಧರಿತ ಗುಣಲಕ್ಷಣದ ಪ್ರಕಾರ;
2. ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣ ವಿಧಾನ.
ಮೊದಲ ವಿಧಾನವು ಸರಳ ಮತ್ತು ಕಡಿಮೆ ಪರಿಪೂರ್ಣವಾಗಿದೆ, ಮತ್ತು ಎರಡನೆಯದು ನಿರ್ಣಾಯಕ ಕೈಗಾರಿಕಾ ಉಪಕರಣಗಳ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ನಿಖರವಾಗಿ ನಿಯಂತ್ರಿಸಲು ಬಳಸಲಾಗುತ್ತದೆ.
ಆವರ್ತನ ಪರಿವರ್ತನೆ ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣದ ವೈಶಿಷ್ಟ್ಯಗಳು
ಈ ವಿಧಾನದ ನಡುವಿನ ವ್ಯತ್ಯಾಸವೆಂದರೆ ಪರಸ್ಪರ ಕ್ರಿಯೆ, ರೋಟರ್ ಕ್ಷೇತ್ರದ ಆವರ್ತನದೊಂದಿಗೆ ತಿರುಗುವ ಮ್ಯಾಗ್ನೆಟಿಕ್ ಫ್ಲಕ್ಸ್ನ «ಸ್ಪೇಸ್ ವೆಕ್ಟರ್» ಮೇಲೆ ಪರಿವರ್ತಕ ನಿಯಂತ್ರಣ ಸಾಧನದ ಪ್ರಭಾವ.
ಈ ತತ್ತ್ವದ ಮೇಲೆ ಕೆಲಸ ಮಾಡಲು ಪರಿವರ್ತಕಗಳಿಗೆ ಕ್ರಮಾವಳಿಗಳನ್ನು ಎರಡು ರೀತಿಯಲ್ಲಿ ರಚಿಸಲಾಗಿದೆ:
1. ಸಂವೇದಕರಹಿತ ನಿಯಂತ್ರಣ;
2. ಹರಿವಿನ ನಿಯಂತ್ರಣ.
ಮೊದಲ ವಿಧಾನವು ಅನುಕ್ರಮಗಳ ಪರ್ಯಾಯದ ಮೇಲೆ ಒಂದು ನಿರ್ದಿಷ್ಟ ಅವಲಂಬನೆಯನ್ನು ನಿರ್ಧರಿಸುವುದನ್ನು ಆಧರಿಸಿದೆ ನಾಡಿ ಅಗಲ ಮಾಡ್ಯುಲೇಶನ್ (PWM) ಪೂರ್ವನಿಗದಿ ಕ್ರಮಾವಳಿಗಳಿಗಾಗಿ ಇನ್ವರ್ಟರ್. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಪರಿವರ್ತಕ ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ನ ವೈಶಾಲ್ಯ ಮತ್ತು ಆವರ್ತನವು ಸ್ಲಿಪ್ ಕರೆಂಟ್ ಮತ್ತು ಲೋಡ್ನಿಂದ ನಿಯಂತ್ರಿಸಲ್ಪಡುತ್ತದೆ, ಆದರೆ ರೋಟರ್ ವೇಗದ ಪ್ರತಿಕ್ರಿಯೆಯನ್ನು ಬಳಸದೆಯೇ.
ಆವರ್ತನ ಪರಿವರ್ತಕದೊಂದಿಗೆ ಸಮಾನಾಂತರವಾಗಿ ಸಂಪರ್ಕಿಸಲಾದ ಹಲವಾರು ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳನ್ನು ನಿಯಂತ್ರಿಸುವಾಗ ಈ ವಿಧಾನವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.ಫ್ಲಕ್ಸ್ ನಿಯಂತ್ರಣವು ಮೋಟರ್ನ ಒಳಗಿನ ಆಪರೇಟಿಂಗ್ ಪ್ರವಾಹಗಳನ್ನು ಅವುಗಳ ವಿಭಜನೆಯೊಂದಿಗೆ ಸಕ್ರಿಯ ಮತ್ತು ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಘಟಕಗಳಾಗಿ ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ ವೆಕ್ಟರ್ಗಳಿಗೆ ವೈಶಾಲ್ಯ, ಆವರ್ತನ ಮತ್ತು ಕೋನವನ್ನು ಹೊಂದಿಸಲು ಪರಿವರ್ತಕ ಕಾರ್ಯಾಚರಣೆಗೆ ಹೊಂದಾಣಿಕೆಗಳನ್ನು ಮಾಡುತ್ತದೆ.
ಇದು ಎಂಜಿನ್ನ ನಿಖರತೆಯನ್ನು ಸುಧಾರಿಸುತ್ತದೆ ಮತ್ತು ಅದರ ಹೊಂದಾಣಿಕೆಯ ಮಿತಿಗಳನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ. ಹರಿವಿನ ನಿಯಂತ್ರಣದ ಬಳಕೆಯು ಕ್ರೇನ್ ಹೋಸ್ಟ್ಗಳು ಅಥವಾ ಕೈಗಾರಿಕಾ ಅಂಕುಡೊಂಕಾದ ಯಂತ್ರಗಳಂತಹ ಹೆಚ್ಚಿನ ಡೈನಾಮಿಕ್ ಲೋಡ್ಗಳೊಂದಿಗೆ ಕಡಿಮೆ ವೇಗದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಡ್ರೈವ್ಗಳ ಸಾಮರ್ಥ್ಯಗಳನ್ನು ವಿಸ್ತರಿಸುತ್ತದೆ.
ವೆಕ್ಟರ್ ತಂತ್ರಜ್ಞಾನದ ಬಳಕೆಯು ಡೈನಾಮಿಕ್ ಟಾರ್ಕ್ ನಿಯಂತ್ರಣವನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸಲು ಅನುಮತಿಸುತ್ತದೆ ಮೂರು-ಹಂತದ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳು.
ಸಮಾನ ಸರ್ಕ್ಯೂಟ್
ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಮೂಲಭೂತ ಸರಳೀಕೃತ ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಈ ಕೆಳಗಿನಂತೆ ಪ್ರತಿನಿಧಿಸಬಹುದು.
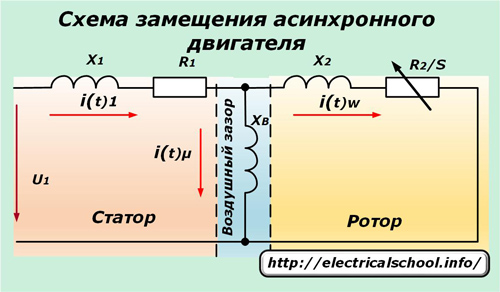
ವೋಲ್ಟೇಜ್ u1 ಅನ್ನು ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳಿಗೆ ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ, ಇದು ಸಕ್ರಿಯ ಪ್ರತಿರೋಧ R1 ಮತ್ತು ಅನುಗಮನದ ಪ್ರತಿರೋಧ X1 ಅನ್ನು ಹೊಂದಿರುತ್ತದೆ. ಇದು, ಗಾಳಿಯ ಅಂತರದ Xv ಯ ಪ್ರತಿರೋಧವನ್ನು ಹೊರಬಂದು, ರೋಟರ್ ವಿಂಡಿಂಗ್ ಆಗಿ ರೂಪಾಂತರಗೊಳ್ಳುತ್ತದೆ, ಅದರಲ್ಲಿ ಅದರ ಪ್ರತಿರೋಧವನ್ನು ಮೀರಿಸುವ ಪ್ರವಾಹವನ್ನು ಉಂಟುಮಾಡುತ್ತದೆ.
ವೆಕ್ಟರ್ ಸರ್ಕ್ಯೂಟ್ನ ಸಮಾನ ಸರ್ಕ್ಯೂಟ್
ಇದರ ನಿರ್ಮಾಣವು ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನಲ್ಲಿ ನಡೆಯುವ ಪ್ರಕ್ರಿಯೆಗಳನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳಲು ಸಹಾಯ ಮಾಡುತ್ತದೆ.

ಸ್ಟೇಟರ್ ಪ್ರವಾಹದ ಶಕ್ತಿಯನ್ನು ಎರಡು ಭಾಗಗಳಾಗಿ ವಿಂಗಡಿಸಲಾಗಿದೆ:
-
iµ - ಹರಿವು-ರೂಪಿಸುವ ವಿಭಾಗ;
-
iw - ಕ್ಷಣವನ್ನು ಉತ್ಪಾದಿಸುವ ಘಟಕ.
ಈ ಸಂದರ್ಭದಲ್ಲಿ, ರೋಟರ್ ಸ್ಲಿಪ್-ಅವಲಂಬಿತ ಸಕ್ರಿಯ ಪ್ರತಿರೋಧ R2 / s ಅನ್ನು ಹೊಂದಿದೆ.
ಸಂವೇದಕರಹಿತ ನಿಯಂತ್ರಣಕ್ಕಾಗಿ, ಈ ಕೆಳಗಿನವುಗಳನ್ನು ಅಳೆಯಲಾಗುತ್ತದೆ:
-
ವೋಲ್ಟೇಜ್ u1;
-
ಪ್ರಸ್ತುತ i1.
ಅವರ ಮೌಲ್ಯಗಳ ಪ್ರಕಾರ, ಅವರು ಲೆಕ್ಕಾಚಾರ ಮಾಡುತ್ತಾರೆ:
-
iµ - ಹರಿವನ್ನು ರೂಪಿಸುವ ಹರಿವಿನ ಘಟಕ;
-
iw - ಮೌಲ್ಯವನ್ನು ಉತ್ಪಾದಿಸುವ ಟಾರ್ಕ್.
ಲೆಕ್ಕಾಚಾರದ ಅಲ್ಗಾರಿದಮ್ ಈಗ ಪ್ರಸ್ತುತ ನಿಯಂತ್ರಕಗಳೊಂದಿಗೆ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಎಲೆಕ್ಟ್ರಾನಿಕ್ ಸಮಾನ ಸರ್ಕ್ಯೂಟ್ ಅನ್ನು ಒಳಗೊಂಡಿದೆ, ಇದು ವಿದ್ಯುತ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ಶುದ್ಧತ್ವ ಪರಿಸ್ಥಿತಿಗಳು ಮತ್ತು ಉಕ್ಕಿನಲ್ಲಿನ ಕಾಂತೀಯ ಶಕ್ತಿಯ ನಷ್ಟಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ.
ಪ್ರಸ್ತುತ ವೆಕ್ಟರ್ಗಳ ಎರಡೂ ಘಟಕಗಳು, ಕೋನ ಮತ್ತು ವೈಶಾಲ್ಯದಲ್ಲಿ ವಿಭಿನ್ನವಾಗಿವೆ, ರೋಟರ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯೊಂದಿಗೆ ಒಟ್ಟಿಗೆ ತಿರುಗುತ್ತವೆ ಮತ್ತು ಸ್ಥಾಯಿ ಸ್ಟೇಟರ್ ಓರಿಯಂಟೇಶನ್ ಸಿಸ್ಟಮ್ ಆಗುತ್ತವೆ.
ಈ ತತ್ತ್ವದ ಪ್ರಕಾರ, ಆವರ್ತನ ಪರಿವರ್ತಕದ ನಿಯತಾಂಕಗಳನ್ನು ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಹೊರೆಗೆ ಅನುಗುಣವಾಗಿ ಸರಿಹೊಂದಿಸಲಾಗುತ್ತದೆ.
ಆವರ್ತನ ಪರಿವರ್ತಕದ ಕಾರ್ಯಾಚರಣೆಯ ತತ್ವ
ಇನ್ವರ್ಟರ್ ಎಂದೂ ಕರೆಯಲ್ಪಡುವ ಈ ಸಾಧನವು ಮುಖ್ಯ ವಿದ್ಯುತ್ ಸರಬರಾಜಿನ ತರಂಗ ರೂಪದಲ್ಲಿ ಎರಡು ಬದಲಾವಣೆಯನ್ನು ಆಧರಿಸಿದೆ.
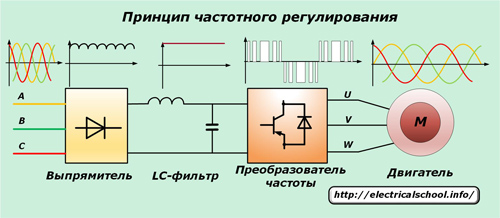
ಆರಂಭದಲ್ಲಿ, ಸೈನುಸೈಡಲ್ ಹಾರ್ಮೋನಿಕ್ಸ್ ಅನ್ನು ತೆಗೆದುಹಾಕುವ ಆದರೆ ಸಿಗ್ನಲ್ ತರಂಗಗಳನ್ನು ಬಿಡುವ ಶಕ್ತಿಯುತ ಡಯೋಡ್ಗಳೊಂದಿಗೆ ರಿಕ್ಟಿಫೈಯರ್ಗೆ ಕೈಗಾರಿಕಾ ವೋಲ್ಟೇಜ್ ಅನ್ನು ನೀಡಲಾಗುತ್ತದೆ. ಅವುಗಳ ತೆಗೆದುಹಾಕುವಿಕೆಗಾಗಿ, ಇಂಡಕ್ಟನ್ಸ್ (LC-ಫಿಲ್ಟರ್) ಹೊಂದಿರುವ ಕೆಪಾಸಿಟರ್ ಬ್ಯಾಂಕ್ ಅನ್ನು ಒದಗಿಸಲಾಗುತ್ತದೆ, ಇದು ಸರಿಪಡಿಸಿದ ವೋಲ್ಟೇಜ್ಗೆ ಸ್ಥಿರವಾದ, ಮೃದುವಾದ ಆಕಾರವನ್ನು ಒದಗಿಸುತ್ತದೆ.
ಸಿಗ್ನಲ್ ನಂತರ ಆವರ್ತನ ಪರಿವರ್ತಕದ ಇನ್ಪುಟ್ಗೆ ಹೋಗುತ್ತದೆ, ಇದು ಆರು ಮೂರು-ಹಂತದ ಸೇತುವೆಯ ಸರ್ಕ್ಯೂಟ್ ಆಗಿದೆ ವಿದ್ಯುತ್ ಟ್ರಾನ್ಸಿಸ್ಟರ್ಗಳು ರಿವರ್ಸ್ ಪೋಲಾರಿಟಿ ವೋಲ್ಟೇಜ್ ಪ್ರೊಟೆಕ್ಷನ್ ಡಯೋಡ್ಗಳೊಂದಿಗೆ IGBT ಅಥವಾ MOSFET ಸರಣಿ. ಈ ಉದ್ದೇಶಗಳಿಗಾಗಿ ಹಿಂದೆ ಬಳಸಿದ ಥೈರಿಸ್ಟರ್ಗಳು ಸಾಕಷ್ಟು ವೇಗವನ್ನು ಹೊಂದಿಲ್ಲ ಮತ್ತು ದೊಡ್ಡ ಅಡಚಣೆಗಳೊಂದಿಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ.
ಮೋಟರ್ನ "ಬ್ರೇಕ್" ಮೋಡ್ ಅನ್ನು ಆನ್ ಮಾಡಲು, ಶಕ್ತಿಯನ್ನು ಹೊರಹಾಕುವ ಶಕ್ತಿಯುತ ಪ್ರತಿರೋಧಕವನ್ನು ಹೊಂದಿರುವ ನಿಯಂತ್ರಿತ ಟ್ರಾನ್ಸಿಸ್ಟರ್ ಅನ್ನು ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಸ್ಥಾಪಿಸಬಹುದು. ಈ ತಂತ್ರವು ಫಿಲ್ಟರ್ ಕೆಪಾಸಿಟರ್ಗಳನ್ನು ಓವರ್ಚಾರ್ಜ್ ಮತ್ತು ಹಾನಿಯಿಂದ ರಕ್ಷಿಸಲು ಮೋಟಾರ್ನಿಂದ ಉತ್ಪತ್ತಿಯಾಗುವ ವೋಲ್ಟೇಜ್ ಅನ್ನು ತೆಗೆದುಹಾಕಲು ಅನುಮತಿಸುತ್ತದೆ.
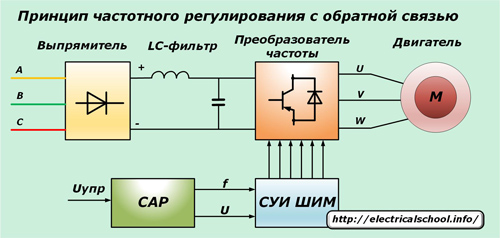
ಪರಿವರ್ತಕದ ವೆಕ್ಟರ್ ಆವರ್ತನ ನಿಯಂತ್ರಣ ವಿಧಾನವು ಎಸಿಎಸ್ ಸಿಸ್ಟಮ್ಗಳಿಂದ ಸಿಗ್ನಲ್ನ ಸ್ವಯಂಚಾಲಿತ ನಿಯಂತ್ರಣವನ್ನು ನಿರ್ವಹಿಸುವ ಸರ್ಕ್ಯೂಟ್ಗಳನ್ನು ರಚಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ. ಇದಕ್ಕಾಗಿ ನಿರ್ವಹಣಾ ವ್ಯವಸ್ಥೆಯನ್ನು ಬಳಸಲಾಗುತ್ತದೆ:
1. ವೈಶಾಲ್ಯ;
2. PWM (ನಾಡಿ ಅಗಲ ಸಿಮ್ಯುಲೇಶನ್).
ವೈಶಾಲ್ಯ ನಿಯಂತ್ರಣ ವಿಧಾನವು ಇನ್ಪುಟ್ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಬದಲಾಯಿಸುವುದರ ಮೇಲೆ ಆಧಾರಿತವಾಗಿದೆ, ಮತ್ತು PWM ಸ್ಥಿರವಾದ ಇನ್ಪುಟ್ ವೋಲ್ಟೇಜ್ನಲ್ಲಿ ವಿದ್ಯುತ್ ಟ್ರಾನ್ಸಿಸ್ಟರ್ಗಳನ್ನು ಬದಲಾಯಿಸುವ ಅಲ್ಗಾರಿದಮ್ ಅನ್ನು ಆಧರಿಸಿದೆ.
PWM ನಿಯಂತ್ರಣದೊಂದಿಗೆ, ರೆಕ್ಟಿಫೈಯರ್ನ ಧನಾತ್ಮಕ ಮತ್ತು ಋಣಾತ್ಮಕ ಟರ್ಮಿನಲ್ಗಳಿಗೆ ಕಟ್ಟುನಿಟ್ಟಾದ ಕ್ರಮದಲ್ಲಿ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ಸಂಪರ್ಕಿಸಿದಾಗ ಸಿಗ್ನಲ್ ಮಾಡ್ಯುಲೇಶನ್ ಅವಧಿಯನ್ನು ರಚಿಸಲಾಗುತ್ತದೆ.
ಜನರೇಟರ್ನ ಗಡಿಯಾರದ ಆವರ್ತನವು ಸಾಕಷ್ಟು ಹೆಚ್ಚಿರುವುದರಿಂದ, ನಂತರ ಇಂಡಕ್ಟಿವ್ ಪ್ರತಿರೋಧವನ್ನು ಹೊಂದಿರುವ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ನ ವಿಂಡಿಂಗ್ನಲ್ಲಿ, ಅವುಗಳನ್ನು ಸಾಮಾನ್ಯ ಸೈನ್ ತರಂಗಕ್ಕೆ ಸುಗಮಗೊಳಿಸಲಾಗುತ್ತದೆ.
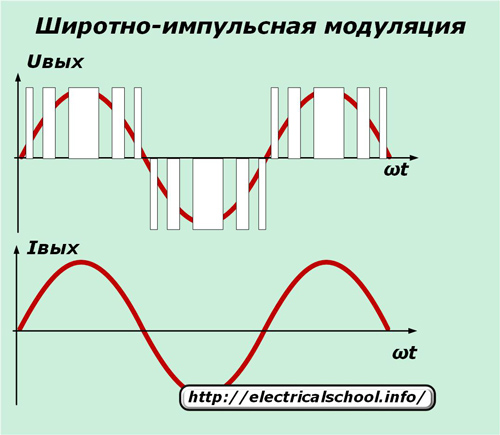
PWM ನಿಯಂತ್ರಣ ವಿಧಾನಗಳು ಶಕ್ತಿಯ ನಷ್ಟಗಳ ನಿರ್ಮೂಲನೆಯನ್ನು ಗರಿಷ್ಠಗೊಳಿಸುತ್ತವೆ ಮತ್ತು ಆವರ್ತನ ಮತ್ತು ವೈಶಾಲ್ಯದ ಏಕಕಾಲಿಕ ನಿಯಂತ್ರಣದಿಂದಾಗಿ ಹೆಚ್ಚಿನ ಪರಿವರ್ತನೆ ದಕ್ಷತೆಯನ್ನು ಒದಗಿಸುತ್ತದೆ. GTO ಸರಣಿಯ ಪವರ್-ಲಾಕ್ಡ್ ಥೈರಿಸ್ಟರ್ ನಿಯಂತ್ರಣ ತಂತ್ರಜ್ಞಾನಗಳು ಅಥವಾ ಇನ್ಸುಲೇಟೆಡ್-ಗೇಟ್ IGBT ಟ್ರಾನ್ಸಿಸ್ಟರ್ಗಳ ಬೈಪೋಲಾರ್ ಬ್ರ್ಯಾಂಡ್ಗಳ ಅಭಿವೃದ್ಧಿಯಿಂದಾಗಿ ಅವು ಲಭ್ಯವಿವೆ.
ಮೂರು-ಹಂತದ ಮೋಟರ್ ಅನ್ನು ನಿಯಂತ್ರಿಸಲು ಅವರ ಸೇರ್ಪಡೆಯ ತತ್ವಗಳನ್ನು ಫೋಟೋದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ.
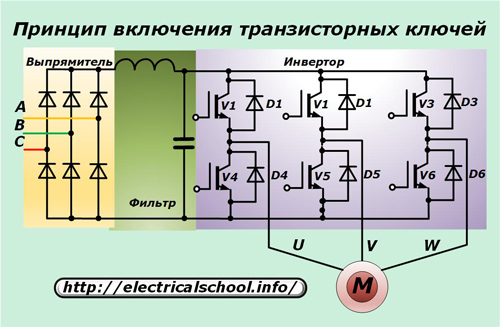
ಆರು IGBT ಗಳಲ್ಲಿ ಪ್ರತಿಯೊಂದು ಆಂಟಿಪ್ಯಾರಲಲ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ತನ್ನದೇ ಆದ ರಿವರ್ಸ್ ಕರೆಂಟ್ ಡಯೋಡ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಸಕ್ರಿಯ ಪ್ರವಾಹವು ಪ್ರತಿ ಟ್ರಾನ್ಸಿಸ್ಟರ್ನ ವಿದ್ಯುತ್ ಸರ್ಕ್ಯೂಟ್ ಮೂಲಕ ಹಾದುಹೋಗುತ್ತದೆ, ಮತ್ತು ಅದರ ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಘಟಕವನ್ನು ಡಯೋಡ್ಗಳ ಮೂಲಕ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ.
ಇನ್ವರ್ಟರ್ ಮತ್ತು ಮೋಟರ್ನ ಕಾರ್ಯಾಚರಣೆಯ ಮೇಲೆ ಬಾಹ್ಯ ವಿದ್ಯುತ್ ಶಬ್ದದ ಪ್ರಭಾವವನ್ನು ತೊಡೆದುಹಾಕಲು, ಆವರ್ತನ ಪರಿವರ್ತಕದ ಸರ್ಕ್ಯೂಟ್ ಒಳಗೊಂಡಿರಬಹುದು ಶಬ್ದ ಕಡಿತ ಫಿಲ್ಟರ್ದಿವಾಳಿ:
-
ರೇಡಿಯೋ ಹಸ್ತಕ್ಷೇಪ;
-
ಆಪರೇಟಿಂಗ್ ಉಪಕರಣಗಳಿಂದ ಉಂಟಾಗುವ ವಿದ್ಯುತ್ ವಿಸರ್ಜನೆಗಳು.
ಇವುಗಳನ್ನು ನಿಯಂತ್ರಕದಿಂದ ಸಂಕೇತಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಆಘಾತವನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಮೋಟಾರ್ ಮತ್ತು ಇನ್ವರ್ಟರ್ ಔಟ್ಪುಟ್ ಟರ್ಮಿನಲ್ಗಳ ನಡುವೆ ರಕ್ಷಿತ ವೈರಿಂಗ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳ ಕಾರ್ಯಾಚರಣೆಯ ನಿಖರತೆಯನ್ನು ಸುಧಾರಿಸಲು, ಆವರ್ತನ ಪರಿವರ್ತಕಗಳ ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ ಒಳಗೊಂಡಿದೆ:
-
ಸುಧಾರಿತ ಇಂಟರ್ಫೇಸ್ ಸಾಮರ್ಥ್ಯಗಳೊಂದಿಗೆ ಸಂವಹನ ಇನ್ಪುಟ್;
-
ಅಂತರ್ನಿರ್ಮಿತ ನಿಯಂತ್ರಕ;
-
ಮೆಮೊರಿ ಕಾರ್ಡ್;
-
ಸಾಫ್ಟ್ವೇರ್;
-
ಮುಖ್ಯ ಔಟ್ಪುಟ್ ನಿಯತಾಂಕಗಳನ್ನು ತೋರಿಸುವ ಮಾಹಿತಿ ಎಲ್ಇಡಿ ಪ್ರದರ್ಶನ;
-
ಬ್ರೇಕ್ ಚಾಪರ್ ಮತ್ತು ಅಂತರ್ನಿರ್ಮಿತ EMC ಫಿಲ್ಟರ್;
-
ಹೆಚ್ಚಿದ ಸಂಪನ್ಮೂಲಗಳ ಅಭಿಮಾನಿಗಳೊಂದಿಗೆ ಬೀಸುವಿಕೆಯ ಆಧಾರದ ಮೇಲೆ ಸರ್ಕ್ಯೂಟ್ ಕೂಲಿಂಗ್ ವ್ಯವಸ್ಥೆ;
-
ನೇರ ಪ್ರವಾಹ ಮತ್ತು ಕೆಲವು ಇತರ ಸಾಧ್ಯತೆಗಳ ಮೂಲಕ ಎಂಜಿನ್ ಅನ್ನು ಬಿಸಿ ಮಾಡುವ ಕಾರ್ಯ.
ಕಾರ್ಯಾಚರಣಾ ವೈರಿಂಗ್ ರೇಖಾಚಿತ್ರಗಳು
ಏಕ-ಹಂತ ಅಥವಾ ಮೂರು-ಹಂತದ ನೆಟ್ವರ್ಕ್ಗಳೊಂದಿಗೆ ಕೆಲಸ ಮಾಡಲು ಆವರ್ತನ ಪರಿವರ್ತಕಗಳನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ. ಆದಾಗ್ಯೂ, 220 ವೋಲ್ಟ್ಗಳ ವೋಲ್ಟೇಜ್ನೊಂದಿಗೆ ನೇರ ಪ್ರವಾಹದ ಕೈಗಾರಿಕಾ ಮೂಲಗಳು ಇದ್ದರೆ, ನಂತರ ಅವುಗಳಿಂದ ಇನ್ವರ್ಟರ್ಗಳನ್ನು ಚಾಲಿತಗೊಳಿಸಬಹುದು.

ಮೂರು-ಹಂತದ ಮಾದರಿಗಳನ್ನು ಮುಖ್ಯ ವೋಲ್ಟೇಜ್ 380 ವೋಲ್ಟ್ಗಳಿಗಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ ಮತ್ತು ಅದನ್ನು ವಿದ್ಯುತ್ ಮೋಟರ್ಗೆ ಫೀಡ್ ಮಾಡಿ. ಏಕ-ಹಂತದ ಇನ್ವರ್ಟರ್ಗಳು 220 ವೋಲ್ಟ್ಗಳಿಂದ ಚಾಲಿತವಾಗುತ್ತವೆ ಮತ್ತು ಕಾಲಾನಂತರದಲ್ಲಿ ಮೂರು ಹಂತಗಳನ್ನು ವಿತರಿಸಲಾಗುತ್ತದೆ.
ಮೋಟರ್ಗೆ ಆವರ್ತನ ಪರಿವರ್ತಕದ ಸಂಪರ್ಕ ಯೋಜನೆಯನ್ನು ಯೋಜನೆಗಳ ಪ್ರಕಾರ ಕೈಗೊಳ್ಳಬಹುದು:
-
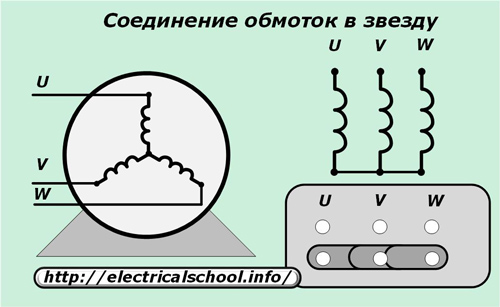
ನಕ್ಷತ್ರಗಳು;
-
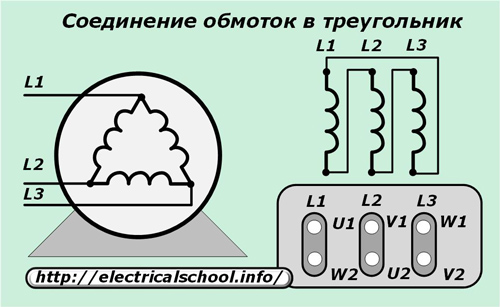
ತ್ರಿಕೋನ.
ಮೋಟಾರಿನ ವಿಂಡ್ಗಳನ್ನು ಪರಿವರ್ತಕಕ್ಕಾಗಿ "ಸ್ಟಾರ್" ನಲ್ಲಿ ಜೋಡಿಸಲಾಗುತ್ತದೆ, 380 ವೋಲ್ಟ್ಗಳ ಮೂರು-ಹಂತದ ನೆಟ್ವರ್ಕ್ನಿಂದ ನೀಡಲಾಗುತ್ತದೆ.
"ಡೆಲ್ಟಾ" ಯೋಜನೆಯ ಪ್ರಕಾರ, ವಿದ್ಯುತ್ ಪರಿವರ್ತಕವನ್ನು ಏಕ-ಹಂತದ 220-ವೋಲ್ಟ್ ನೆಟ್ವರ್ಕ್ಗೆ ಸಂಪರ್ಕಿಸಿದಾಗ ಮೋಟಾರ್ ವಿಂಡ್ಗಳನ್ನು ಜೋಡಿಸಲಾಗುತ್ತದೆ.
ಆವರ್ತನ ಪರಿವರ್ತಕಕ್ಕೆ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ ಅನ್ನು ಸಂಪರ್ಕಿಸುವ ವಿಧಾನವನ್ನು ಆಯ್ಕೆಮಾಡುವಾಗ, ಇನ್ವರ್ಟರ್ನ ಸಾಮರ್ಥ್ಯಗಳೊಂದಿಗೆ ನಿಧಾನವಾದ, ಲೋಡ್ ಮಾಡಲಾದ ಪ್ರಾರಂಭವನ್ನು ಒಳಗೊಂಡಂತೆ ಎಲ್ಲಾ ವಿಧಾನಗಳಲ್ಲಿ ಚಾಲನೆಯಲ್ಲಿರುವ ಮೋಟರ್ ರಚಿಸಬಹುದಾದ ವಿದ್ಯುತ್ ಅನುಪಾತಕ್ಕೆ ನೀವು ಗಮನ ಕೊಡಬೇಕು.
ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ನಿರಂತರವಾಗಿ ಓವರ್ಲೋಡ್ ಮಾಡುವುದು ಅಸಾಧ್ಯ, ಮತ್ತು ಅದರ ಔಟ್ಪುಟ್ ಶಕ್ತಿಯ ಸಣ್ಣ ಮೀಸಲು ಅದರ ದೀರ್ಘಕಾಲೀನ ಮತ್ತು ತೊಂದರೆ-ಮುಕ್ತ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಖಚಿತಪಡಿಸುತ್ತದೆ.