ಆಧುನಿಕ ಬ್ರಷ್ ರಹಿತ DC ಮೋಟಾರ್ಗಳು
ಸೆಮಿಕಂಡಕ್ಟರ್ ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ ಮತ್ತು ಶಕ್ತಿಶಾಲಿ ನಿಯೋಡೈಮಿಯಮ್ ಆಯಸ್ಕಾಂತಗಳನ್ನು ರಚಿಸುವ ತಂತ್ರಜ್ಞಾನದಲ್ಲಿನ ಗಮನಾರ್ಹ ಪ್ರಗತಿಗೆ ಧನ್ಯವಾದಗಳು, ಬ್ರಷ್ಲೆಸ್ ಡಿಸಿ ಮೋಟಾರ್ಗಳನ್ನು ಇಂದು ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಅವುಗಳನ್ನು ತೊಳೆಯುವ ಯಂತ್ರಗಳು, ವ್ಯಾಕ್ಯೂಮ್ ಕ್ಲೀನರ್ಗಳು, ಫ್ಯಾನ್ಗಳು, ಡ್ರೋನ್ಗಳು ಇತ್ಯಾದಿಗಳಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ.
ಮತ್ತು ಬ್ರಷ್ರಹಿತ ಮೋಟರ್ನ ಕಾರ್ಯಾಚರಣೆಯ ತತ್ವದ ಕಲ್ಪನೆಯನ್ನು 19 ನೇ ಶತಮಾನದ ಆರಂಭದಲ್ಲಿ ವ್ಯಕ್ತಪಡಿಸಲಾಗಿದ್ದರೂ, ಅರೆವಾಹಕ ಯುಗದ ಆರಂಭದವರೆಗೆ, ತಂತ್ರಜ್ಞಾನಗಳು ಪ್ರಾಯೋಗಿಕ ಅನುಷ್ಠಾನಕ್ಕೆ ಸಿದ್ಧವಾದಾಗ ಅದು ರೆಕ್ಕೆಗಳಲ್ಲಿ ಕಾಯುತ್ತಿತ್ತು. ಈ ಆಸಕ್ತಿದಾಯಕ ಮತ್ತು ಪರಿಣಾಮಕಾರಿ ಪರಿಕಲ್ಪನೆ, ಇದು ಬ್ರಷ್ಲೆಸ್ ಡೈರೆಕ್ಟ್ ಕರೆಂಟ್ ಮೋಟಾರ್ಗಳು ಇಂದಿನಂತೆ ವ್ಯಾಪಕವಾಗಿ ನಡೆಯಲು ಅವಕಾಶ ಮಾಡಿಕೊಟ್ಟಿತು. …
ಇಂಗ್ಲಿಷ್ ಆವೃತ್ತಿಯಲ್ಲಿ, ಅವುಗಳನ್ನು ಈ ರೀತಿಯ ಎಂಜಿನ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ BLDC ಮೋಟಾರ್ - ಬ್ರಷ್ಲೆಸ್ DC ಮೋಟಾರ್ಗಳು - ಬ್ರಷ್ ರಹಿತ ಡಿಸಿ ಮೋಟಾರ್. ಮೋಟಾರ್ ರೋಟರ್ ಒಳಗೊಂಡಿದೆ ಶಾಶ್ವತ ಆಯಸ್ಕಾಂತಗಳು, ಮತ್ತು ವರ್ಕಿಂಗ್ ವಿಂಡ್ಗಳು ಸ್ಟೇಟರ್ನಲ್ಲಿ ನೆಲೆಗೊಂಡಿವೆ, ಅಂದರೆ, BLDC ಮೋಟಾರು ಸಾಧನವು ಕ್ಲಾಸಿಕ್ ಬ್ರಷ್ಡ್ ಮೋಟರ್ನಲ್ಲಿ ಸಂಪೂರ್ಣವಾಗಿ ವಿರುದ್ಧವಾಗಿದೆ. BLDC ಮೋಟಾರ್ ಅನ್ನು ಎಲೆಕ್ಟ್ರಾನಿಕ್ ನಿಯಂತ್ರಕದಿಂದ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ ESC - ಎಲೆಕ್ಟ್ರಾನಿಕ್ ವೇಗ ನಿಯಂತ್ರಕ - ಎಲೆಕ್ಟ್ರಾನಿಕ್ ಕ್ರೂಸ್ ನಿಯಂತ್ರಣ.
ಎಲೆಕ್ಟ್ರಾನಿಕ್ ನಿಯಂತ್ರಕ ಮತ್ತು ಹೆಚ್ಚಿನ ದಕ್ಷತೆ
ಎಲೆಕ್ಟ್ರಾನಿಕ್ ನಿಯಂತ್ರಕವು ಬ್ರಷ್ಲೆಸ್ ಮೋಟರ್ಗೆ ಸರಬರಾಜು ಮಾಡಲಾದ ವಿದ್ಯುತ್ ಶಕ್ತಿಯನ್ನು ಸರಾಗವಾಗಿ ವೈವಿಧ್ಯಗೊಳಿಸಲು ಅನುಮತಿಸುತ್ತದೆ. ಪ್ರತಿರೋಧಕ ವೇಗದ ಗವರ್ನರ್ಗಳ ಸರಳ ಆವೃತ್ತಿಗಳಿಗಿಂತ ಭಿನ್ನವಾಗಿ, ಮೋಟಾರಿನೊಂದಿಗೆ ಸರಣಿಯಲ್ಲಿ ಪ್ರತಿರೋಧಕ ಲೋಡ್ ಅನ್ನು ಸಂಪರ್ಕಿಸುವ ಮೂಲಕ ಶಕ್ತಿಯನ್ನು ಮಿತಿಗೊಳಿಸುತ್ತದೆ, ಇದು ಹೆಚ್ಚುವರಿ ಶಕ್ತಿಯನ್ನು ಶಾಖವಾಗಿ ಪರಿವರ್ತಿಸುತ್ತದೆ, ಎಲೆಕ್ಟ್ರಾನಿಕ್ ವೇಗ ನಿಯಂತ್ರಣವು ವಿತರಿಸಿದ ವಿದ್ಯುತ್ ಶಕ್ತಿಯನ್ನು ವ್ಯರ್ಥ ಮಾಡದೆ ಗಮನಾರ್ಹವಾಗಿ ಹೆಚ್ಚಿನ ದಕ್ಷತೆಯನ್ನು ಒದಗಿಸುತ್ತದೆ. ..
ಬ್ರಷ್ ರಹಿತ ಡಿಸಿ ಮೋಟಾರ್ ಅನ್ನು ಹೀಗೆ ವರ್ಗೀಕರಿಸಬಹುದು ಸ್ವಯಂ ಸಿಂಕ್ರೊನೈಸಿಂಗ್ ಸಿಂಕ್ರೊನಸ್ ಮೋಟಾರ್, ನಿಯಮಿತ ನಿರ್ವಹಣೆಯ ಅಗತ್ಯವಿರುವ ಸ್ಪಾರ್ಕಿಂಗ್ ನೋಡ್ ಅನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ಆಫ್ ಮಾಡಲಾಗಿದೆ - ಸಂಗ್ರಾಹಕ… ಸಂಗ್ರಾಹಕನ ಕಾರ್ಯವನ್ನು ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ, ಇದರಿಂದಾಗಿ ಉತ್ಪನ್ನದ ಸಂಪೂರ್ಣ ವಿನ್ಯಾಸವು ಹೆಚ್ಚು ಸರಳವಾಗಿದೆ ಮತ್ತು ಹೆಚ್ಚು ಸಾಂದ್ರವಾಗಿರುತ್ತದೆ.
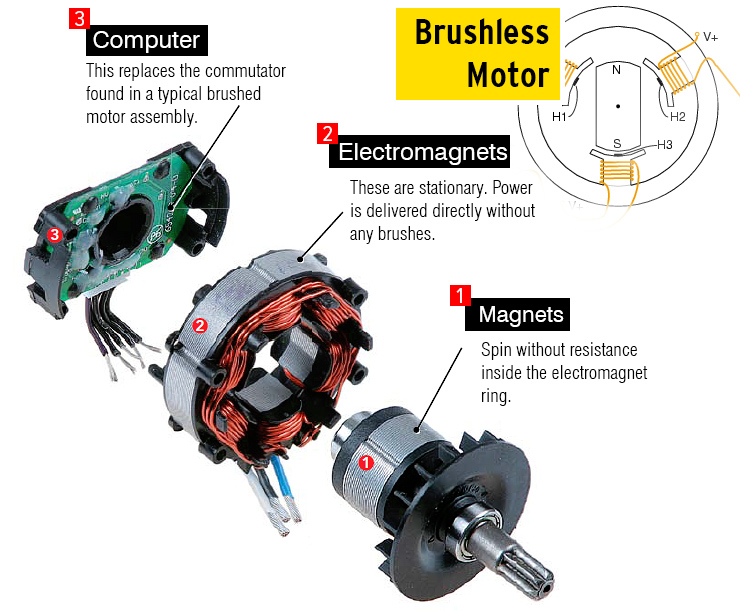
ಕುಂಚಗಳನ್ನು ವಾಸ್ತವವಾಗಿ ಎಲೆಕ್ಟ್ರಾನಿಕ್ ಸ್ವಿಚ್ಗಳಿಂದ ಬದಲಾಯಿಸಲಾಗುತ್ತದೆ, ಇದರಲ್ಲಿ ನಷ್ಟಗಳು ಯಾಂತ್ರಿಕ ಸ್ವಿಚಿಂಗ್ಗಿಂತ ಚಿಕ್ಕದಾಗಿದೆ. ರೋಟರ್ನಲ್ಲಿನ ಶಕ್ತಿಯುತ ನಿಯೋಡೈಮಿಯಮ್ ಆಯಸ್ಕಾಂತಗಳು ಶಾಫ್ಟ್ನಲ್ಲಿ ಹೆಚ್ಚಿನ ಟಾರ್ಕ್ ಅನ್ನು ಅನುಮತಿಸುತ್ತದೆ. ಮತ್ತು ಅಂತಹ ಎಂಜಿನ್ ಅದರ ಸಂಗ್ರಾಹಕ ಪೂರ್ವವರ್ತಿಗಿಂತ ಕಡಿಮೆ ಬಿಸಿಯಾಗುತ್ತದೆ.
ಪರಿಣಾಮವಾಗಿ, ಎಂಜಿನ್ನ ದಕ್ಷತೆಯು ಉತ್ತಮವಾಗಿದೆ, ಮತ್ತು ಪ್ರತಿ ಕಿಲೋಗ್ರಾಂ ತೂಕದ ಶಕ್ತಿಯು ಹೆಚ್ಚಾಗಿರುತ್ತದೆ, ಜೊತೆಗೆ ಸಾಕಷ್ಟು ವಿಶಾಲವಾದ ರೋಟರ್ ವೇಗ ನಿಯಂತ್ರಣ ಮತ್ತು ರಚಿತವಾದ ರೇಡಿಯೊ ಹಸ್ತಕ್ಷೇಪದ ಸಂಪೂರ್ಣ ಅನುಪಸ್ಥಿತಿ. ರಚನಾತ್ಮಕವಾಗಿ, ಈ ರೀತಿಯ ಎಂಜಿನ್ಗಳು ನೀರಿನಲ್ಲಿ ಮತ್ತು ಆಕ್ರಮಣಕಾರಿ ಪರಿಸರದಲ್ಲಿ ಕೆಲಸ ಮಾಡಲು ಸುಲಭವಾಗಿ ಹೊಂದಿಕೊಳ್ಳುತ್ತವೆ.
ಎಲೆಕ್ಟ್ರಾನಿಕ್ ನಿಯಂತ್ರಣ ಘಟಕವು ಬ್ರಷ್ಲೆಸ್ ಡಿಸಿ ಮೋಟರ್ನ ಅತ್ಯಂತ ಪ್ರಮುಖ ಮತ್ತು ದುಬಾರಿ ಭಾಗವಾಗಿದೆ, ಆದರೆ ಅದನ್ನು ವಿತರಿಸಲಾಗುವುದಿಲ್ಲ.ಈ ಸಾಧನದಿಂದ, ಎಂಜಿನ್ ಶಕ್ತಿಯನ್ನು ಪಡೆಯುತ್ತದೆ, ಅದರ ನಿಯತಾಂಕಗಳು ಏಕಕಾಲದಲ್ಲಿ ವೇಗ ಮತ್ತು ಶಕ್ತಿ ಎರಡನ್ನೂ ಪರಿಣಾಮ ಬೀರುತ್ತವೆ, ಅದು ಎಂಜಿನ್ ಲೋಡ್ ಅಡಿಯಲ್ಲಿ ಅಭಿವೃದ್ಧಿಪಡಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ.
ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಸರಿಹೊಂದಿಸಬೇಕಾಗಿಲ್ಲದಿದ್ದರೂ ಸಹ, ಎಲೆಕ್ಟ್ರಾನಿಕ್ ನಿಯಂತ್ರಣ ಘಟಕವು ಇನ್ನೂ ಅಗತ್ಯವಿದೆ, ಏಕೆಂದರೆ ಇದು ನಿಯಂತ್ರಣ ಕಾರ್ಯವನ್ನು ಮಾತ್ರ ಒಯ್ಯುತ್ತದೆ, ಆದರೆ ವಿದ್ಯುತ್ ಸರಬರಾಜು ಘಟಕವನ್ನು ಹೊಂದಿದೆ. ESC ಒಂದು ಅನಲಾಗ್ ಎಂದು ನಾವು ಹೇಳಬಹುದು ಅಸಮಕಾಲಿಕ AC ಮೋಟಾರ್ಗಳಿಗಾಗಿ ಆವರ್ತನ ನಿಯಂತ್ರಕಬ್ರಶ್ಲೆಸ್ ಡಿಸಿ ಮೋಟರ್ ಅನ್ನು ಪವರ್ ಮಾಡಲು ಮತ್ತು ನಿಯಂತ್ರಿಸಲು ವಿಶೇಷವಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ.
BLDC ಮೋಟಾರ್ ನಿಯಂತ್ರಣ
BLDC ಮೋಟಾರ್ ಅನ್ನು ಹೇಗೆ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ ಎಂಬುದನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳಲು, ಕಮ್ಯುಟೇಟರ್ ಮೋಟಾರ್ ಹೇಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ ಎಂಬುದನ್ನು ನಾವು ಮೊದಲು ನೆನಪಿಸಿಕೊಳ್ಳೋಣ. ಅದರ ಮಧ್ಯಭಾಗದಲ್ಲಿ ಕಾಂತೀಯ ಕ್ಷೇತ್ರದಲ್ಲಿ ಪ್ರವಾಹದೊಂದಿಗೆ ಚೌಕಟ್ಟಿನ ತಿರುಗುವಿಕೆಯ ತತ್ವ.
ಪ್ರತಿ ಬಾರಿಯೂ ಕರೆಂಟ್ನೊಂದಿಗೆ ಫ್ರೇಮ್ ಸುತ್ತುತ್ತದೆ ಮತ್ತು ಸಮತೋಲನ ಸ್ಥಾನವನ್ನು ಕಂಡುಕೊಳ್ಳುತ್ತದೆ, ಕಮ್ಯುಟೇಟರ್ (ಸಂಗ್ರಾಹಕನ ವಿರುದ್ಧ ಒತ್ತಿದರೆ ಬ್ರಷ್ಗಳು) ಫ್ರೇಮ್ ಮೂಲಕ ಪ್ರವಾಹದ ದಿಕ್ಕನ್ನು ಬದಲಾಯಿಸುತ್ತದೆ ಮತ್ತು ಫ್ರೇಮ್ ಮುಂದುವರಿಯುತ್ತದೆ. ಫ್ರೇಮ್ ಧ್ರುವದಿಂದ ಧ್ರುವಕ್ಕೆ ಚಲಿಸುವಾಗ ಈ ಪ್ರಕ್ರಿಯೆಯು ಪುನರಾವರ್ತನೆಯಾಗುತ್ತದೆ. ಸಂಗ್ರಾಹಕ ಮೋಟರ್ನಲ್ಲಿ ಮಾತ್ರ ಅಂತಹ ಅನೇಕ ಚೌಕಟ್ಟುಗಳಿವೆ ಮತ್ತು ಹಲವಾರು ಜೋಡಿ ಕಾಂತೀಯ ಧ್ರುವಗಳಿವೆ, ಅದಕ್ಕಾಗಿಯೇ ಬ್ರಷ್ ಸಂಗ್ರಾಹಕವು ಎರಡು ಸಂಪರ್ಕಗಳನ್ನು ಹೊಂದಿಲ್ಲ, ಆದರೆ ಹಲವು.
ECM ಅದೇ ರೀತಿ ಮಾಡುತ್ತದೆ. ರೋಟರ್ ಸಮತೋಲನದ ಸ್ಥಾನದಿಂದ ದೂರ ಸರಿಯಬೇಕಾದ ತಕ್ಷಣ ಇದು ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ಧ್ರುವೀಯತೆಯನ್ನು ಹಿಮ್ಮುಖಗೊಳಿಸುತ್ತದೆ. ನಿಯಂತ್ರಣ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಮಾತ್ರ ರೋಟರ್ಗೆ ಸರಬರಾಜು ಮಾಡಲಾಗುವುದಿಲ್ಲ, ಆದರೆ ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳಿಗೆ, ಮತ್ತು ಸರಿಯಾದ ಸಮಯದಲ್ಲಿ (ರೋಟರ್ ಹಂತಗಳು) ಸೆಮಿಕಂಡಕ್ಟರ್ ಸ್ವಿಚ್ಗಳ ಸಹಾಯದಿಂದ ಇದನ್ನು ಮಾಡಲಾಗುತ್ತದೆ.
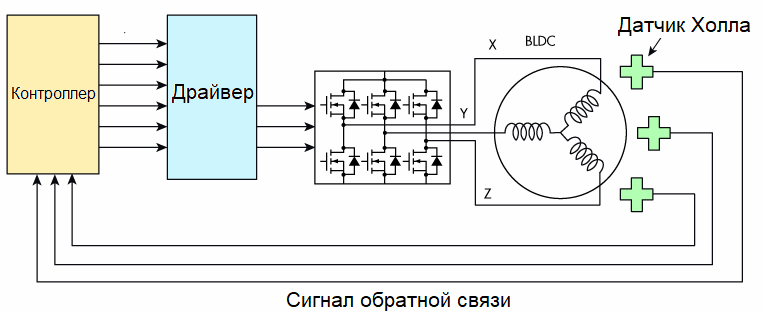
ಬ್ರಷ್ಲೆಸ್ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳಿಗೆ ಕರೆಂಟ್ ಅನ್ನು ಸರಿಯಾದ ಸಮಯದಲ್ಲಿ ಸರಬರಾಜು ಮಾಡಬೇಕು, ಅಂದರೆ, ರೋಟರ್ ನಿರ್ದಿಷ್ಟ ತಿಳಿದಿರುವ ಸ್ಥಾನದಲ್ಲಿದ್ದಾಗ. ಇದನ್ನು ಮಾಡಲು, ಕೆಳಗಿನ ವಿಧಾನಗಳಲ್ಲಿ ಒಂದನ್ನು ಬಳಸಿ.ಮೊದಲನೆಯದು ರೋಟರ್ ಸ್ಥಾನದ ಸಂವೇದಕವನ್ನು ಆಧರಿಸಿದೆ, ಎರಡನೆಯದು ಪ್ರಸ್ತುತ ಶಕ್ತಿಯನ್ನು ಸ್ವೀಕರಿಸದಿರುವ ಸುರುಳಿಗಳ ಇಎಮ್ಎಫ್ ಅನ್ನು ಅಳೆಯುವ ಮೂಲಕ.
ಸಂವೇದಕಗಳು ವಿಭಿನ್ನವಾಗಿವೆ, ಕಾಂತೀಯ ಮತ್ತು ಆಪ್ಟಿಕಲ್, ಅತ್ಯಂತ ಜನಪ್ರಿಯವಾದವು ಮ್ಯಾಗ್ನೆಟಿಕ್ ಸಂವೇದಕಗಳಾಗಿವೆ ಹಾಲ್ ಪರಿಣಾಮ… ಎರಡನೆಯ ವಿಧಾನ (EMF ಮಾಪನದ ಆಧಾರದ ಮೇಲೆ), ಪರಿಣಾಮಕಾರಿಯಾಗಿದ್ದರೂ, ಕಡಿಮೆ ವೇಗದಲ್ಲಿ ಮತ್ತು ಪ್ರಾರಂಭದಲ್ಲಿ ನಿಖರವಾದ ನಿಯಂತ್ರಣವನ್ನು ಅನುಮತಿಸುವುದಿಲ್ಲ. ಹಾಲ್ ಸಂವೇದಕಗಳು, ಮತ್ತೊಂದೆಡೆ, ಎಲ್ಲಾ ವಿಧಾನಗಳಲ್ಲಿ ಹೆಚ್ಚು ನಿಖರವಾದ ನಿಯಂತ್ರಣವನ್ನು ಒದಗಿಸುತ್ತವೆ. ಮೂರು-ಹಂತದ BLDC ಮೋಟಾರ್ಗಳಲ್ಲಿ ಅಂತಹ ಮೂರು ಸಂವೇದಕಗಳಿವೆ.
ಶಾಫ್ಟ್ ಲೋಡ್ (ಫ್ಯಾನ್, ಪ್ರೊಪೆಲ್ಲರ್, ಇತ್ಯಾದಿ) ಇಲ್ಲದೆ ಮೋಟಾರ್ ಪ್ರಾರಂಭವಾಗುವ ಸಂದರ್ಭಗಳಲ್ಲಿ ರೋಟರ್ ಸ್ಥಾನ ಸಂವೇದಕಗಳಿಲ್ಲದ ಮೋಟಾರ್ಗಳು ಅನ್ವಯಿಸುತ್ತವೆ. ಪ್ರಾರಂಭವನ್ನು ಲೋಡ್ ಅಡಿಯಲ್ಲಿ ಮಾಡಿದರೆ, ರೋಟರ್ ಸ್ಥಾನ ಸಂವೇದಕಗಳೊಂದಿಗೆ ಮೋಟಾರ್ ಅಗತ್ಯವಿದೆ. ಎರಡೂ ಆಯ್ಕೆಗಳು ತಮ್ಮ ಬಾಧಕಗಳನ್ನು ಹೊಂದಿವೆ.
ಸಂವೇದಕದೊಂದಿಗೆ ಪರಿಹಾರವು ಹೆಚ್ಚು ಅನುಕೂಲಕರ ನಿಯಂತ್ರಣವಾಗಿ ಬದಲಾಗುತ್ತದೆ, ಆದರೆ ಕನಿಷ್ಠ ಒಂದು ಸಂವೇದಕ ವಿಫಲವಾದರೆ, ಎಂಜಿನ್ ಅನ್ನು ಡಿಸ್ಅಸೆಂಬಲ್ ಮಾಡಬೇಕಾಗುತ್ತದೆ, ಜೊತೆಗೆ, ಸಂವೇದಕಗಳಿಗೆ ಪ್ರತ್ಯೇಕ ತಂತಿಗಳು ಬೇಕಾಗುತ್ತವೆ. ಸಂವೇದಕರಹಿತ ಆವೃತ್ತಿಯಲ್ಲಿ, ಯಾವುದೇ ವಿಶೇಷ ತಂತಿಗಳು ಅಗತ್ಯವಿಲ್ಲ, ಆದರೆ ಪ್ರಾರಂಭದ ಸಮಯದಲ್ಲಿ ರೋಟರ್ ಹಿಂದಕ್ಕೆ ಮತ್ತು ಮುಂದಕ್ಕೆ ಸ್ವಿಂಗ್ ಆಗುತ್ತದೆ. ಇದು ಸ್ವೀಕಾರಾರ್ಹವಲ್ಲದಿದ್ದರೆ, ಸಿಸ್ಟಮ್ನಲ್ಲಿ ಸಂವೇದಕಗಳನ್ನು ಸ್ಥಾಪಿಸುವುದು ಅವಶ್ಯಕ.
ರೋಟರ್ ಮತ್ತು ಸ್ಟೇಟರ್, ಹಂತಗಳ ಸಂಖ್ಯೆ
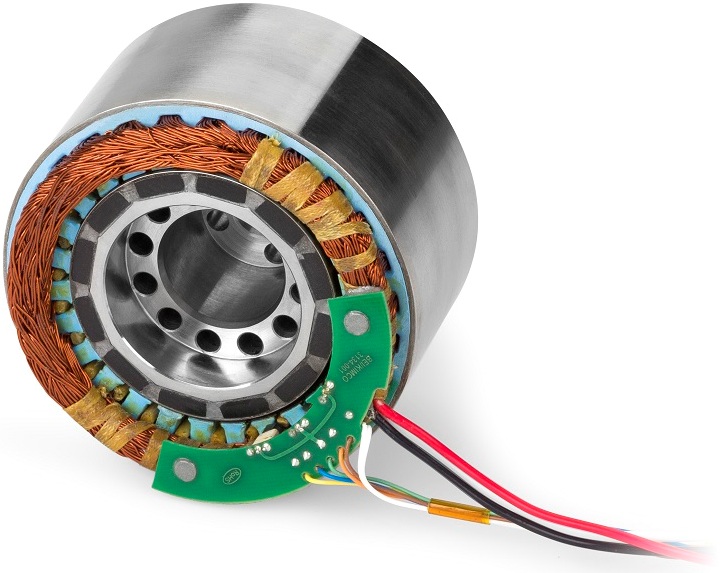
BLDC ಮೋಟಾರಿನ ರೋಟರ್ ಬಾಹ್ಯ ಅಥವಾ ಆಂತರಿಕ ಮತ್ತು ಸ್ಟೇಟರ್ ಆಂತರಿಕ ಅಥವಾ ಬಾಹ್ಯ ಕ್ರಮವಾಗಿ ಆಗಿರಬಹುದು. ಸ್ಟೇಟರ್ ಅನ್ನು ಕಾಂತೀಯವಾಗಿ ವಾಹಕ ವಸ್ತುಗಳಿಂದ ತಯಾರಿಸಲಾಗುತ್ತದೆ, ಹಲ್ಲುಗಳ ಸಂಖ್ಯೆಯನ್ನು ಹಂತಗಳ ಸಂಖ್ಯೆಯಿಂದ ಸಂಪೂರ್ಣವಾಗಿ ಭಾಗಿಸಲಾಗಿದೆ. ರೋಟರ್ ಅನ್ನು ಆಯಸ್ಕಾಂತೀಯವಾಗಿ ವಾಹಕ ವಸ್ತುವಿನಿಂದ ಮಾಡಬೇಕಿಲ್ಲ, ಆದರೆ ಅದಕ್ಕೆ ದೃಢವಾಗಿ ಲಗತ್ತಿಸಲಾದ ಆಯಸ್ಕಾಂತಗಳೊಂದಿಗೆ ಅಗತ್ಯವಾಗಿ ಮಾಡಬಹುದು.

ಪ್ರಬಲವಾದ ಆಯಸ್ಕಾಂತಗಳು, ಲಭ್ಯವಿರುವ ಟಾರ್ಕ್ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ. ಸ್ಟೇಟರ್ ಹಲ್ಲುಗಳ ಸಂಖ್ಯೆಯು ರೋಟರ್ ಆಯಸ್ಕಾಂತಗಳ ಸಂಖ್ಯೆಗೆ ಸಮನಾಗಿರಬಾರದು.ಕನಿಷ್ಠ ಸಂಖ್ಯೆಯ ಹಲ್ಲುಗಳು ನಿಯಂತ್ರಣ ಹಂತಗಳ ಸಂಖ್ಯೆಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಹೆಚ್ಚಿನ ಆಧುನಿಕ ಬ್ರಶ್ಲೆಸ್ ಡಿಸಿ ಮೋಟಾರ್ಗಳು ಮೂರು-ಹಂತಗಳಾಗಿವೆ, ವಿನ್ಯಾಸ ಮತ್ತು ನಿಯಂತ್ರಣದ ಸರಳತೆಗಾಗಿ. AC ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ಗಳಲ್ಲಿರುವಂತೆ, ಮೂರು ಹಂತಗಳ ವಿಂಡ್ಗಳನ್ನು ಇಲ್ಲಿ "ಡೆಲ್ಟಾ" ಅಥವಾ "ಸ್ಟಾರ್" ಮೂಲಕ ಸ್ಟೇಟರ್ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ.
ರೋಟರ್ ಸ್ಥಾನ ಸಂವೇದಕಗಳಿಲ್ಲದ ಅಂತಹ ಮೋಟಾರುಗಳು 3 ವಿದ್ಯುತ್ ತಂತಿಗಳನ್ನು ಹೊಂದಿವೆ, ಮತ್ತು ಸಂವೇದಕಗಳೊಂದಿಗೆ ಮೋಟಾರ್ಗಳು 8 ತಂತಿಗಳನ್ನು ಹೊಂದಿವೆ: ಸಂವೇದಕಗಳನ್ನು ಶಕ್ತಿಯುತಗೊಳಿಸಲು ಎರಡು ಹೆಚ್ಚುವರಿ ತಂತಿಗಳು ಮತ್ತು ಸಂವೇದಕಗಳ ಸಿಗ್ನಲ್ ಔಟ್ಪುಟ್ಗಳಿಗಾಗಿ ಮೂರು.
ಕಡಿಮೆ-ವೇಗದ ಬಾಹ್ಯ ರೋಟರ್ ಮೋಟರ್ಗಳನ್ನು ಪ್ರತಿ ಹಂತಕ್ಕೆ ಹೆಚ್ಚಿನ ಸಂಖ್ಯೆಯ ಧ್ರುವಗಳೊಂದಿಗೆ (ಮತ್ತು ಆದ್ದರಿಂದ ಹಲ್ಲುಗಳು) ಕೋನೀಯ ಆವರ್ತನದೊಂದಿಗೆ ತಿರುಗುವಿಕೆಯನ್ನು ಪಡೆಯಲು ನಿಯಂತ್ರಣ ಪ್ರವಾಹದ ಆವರ್ತನಕ್ಕಿಂತ ಗಮನಾರ್ಹವಾಗಿ ಕಡಿಮೆ ಮಾಡಲಾಗುತ್ತದೆ. ಆದರೆ ಹೆಚ್ಚಿನ ವೇಗದ ಮೂರು-ಹಂತದ ಮೋಟಾರುಗಳೊಂದಿಗೆ ಸಹ, 9 ಕ್ಕಿಂತ ಕಡಿಮೆ ಹಲ್ಲುಗಳ ಸಂಖ್ಯೆಯನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಬಳಸಲಾಗುವುದಿಲ್ಲ.