ಅಳಿಲು-ಕೇಜ್ ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ ಅನ್ನು ಹಿಮ್ಮುಖಗೊಳಿಸಿ ಮತ್ತು ನಿಲ್ಲಿಸಿ
ಇಂಡಕ್ಷನ್ ಮೋಟಾರ್ ರಿವರ್ಸಿಬಲ್ ಯಂತ್ರವಾಗಿದೆ. ರೋಟರ್ನ ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕನ್ನು ಬದಲಾಯಿಸಲು, ಆಯಸ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕನ್ನು ಬದಲಾಯಿಸುವುದು ಅವಶ್ಯಕ (ಸರಬರಾಜು ತಂತಿಗಳನ್ನು ಮೋಟರ್ನ ಎರಡು ಹಂತಗಳ ಟರ್ಮಿನಲ್ಗಳಿಗೆ ಬದಲಾಯಿಸುವ ಮೂಲಕ) - ಎಂಜಿನ್ ಪ್ರಾರಂಭ ಮತ್ತು ಬ್ರೇಕ್ ಸರ್ಕ್ಯೂಟ್ಗಳು
ತಿರುಗುವಿಕೆಯ ಎರಡು ದಿಕ್ಕುಗಳ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 1.
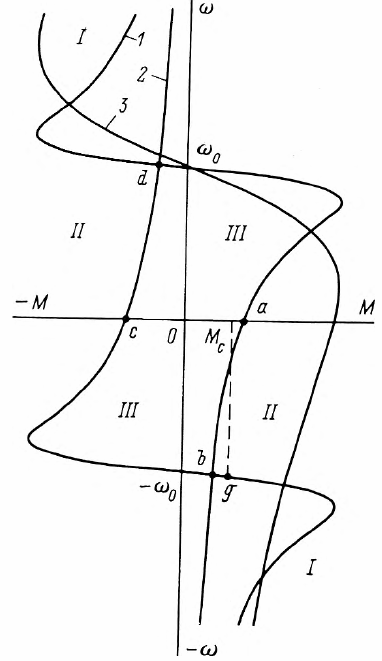
ಅಕ್ಕಿ. 1. ನೆಟ್ವರ್ಕ್ (I), ವಿರೋಧ ಮೋಡ್ (II) ಮತ್ತು ಮೋಟಾರ್ (III) 1, 2 ಗೆ ಶಕ್ತಿಯ ಪೂರೈಕೆಯೊಂದಿಗೆ ಸ್ಟಾಪ್ ಮೋಡ್ನಲ್ಲಿ ರಿವರ್ಸಿಬಲ್ ಕಾರ್ಯಾಚರಣೆಗಾಗಿ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳ ಕುಟುಂಬ; 3 - ಕೃತಕ.
ಅಳಿಲು ಕೇಜ್ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ ಅನ್ನು ಮೋಟರ್ ಆಗಿ ಮಾತ್ರವಲ್ಲದೆ ಬ್ರೇಕ್ ಆಗಿಯೂ ಬಳಸಬಹುದು. ಸ್ಟಾಪ್ ಮೋಡ್ನಲ್ಲಿ, ಪ್ರತಿ ವಿದ್ಯುತ್ ಮೋಟರ್ ಯಾವಾಗಲೂ ಜನರೇಟರ್ ಆಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಅಳಿಲು-ಕೇಜ್ ರೋಟರ್ನೊಂದಿಗೆ ಇಂಡಕ್ಷನ್ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ ಮೂರು ಬ್ರೇಕಿಂಗ್ ಮೋಡ್ಗಳನ್ನು ಹೊಂದಬಹುದು.
ಪುನರುತ್ಪಾದಕ ಬ್ರೇಕಿಂಗ್ ಮೋಡ್ನಲ್ಲಿ, ಯಂತ್ರವು ನಕಾರಾತ್ಮಕ ಸ್ಲಿಪ್ನೊಂದಿಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ರೋಟರ್ನ ವೇಗವು ಆಯಸ್ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಮೀರುತ್ತದೆ.ಸಹಜವಾಗಿ, ಈ ಮೋಡ್ಗೆ ಬದಲಾಯಿಸಲು, ಶಾಫ್ಟ್ನ ಬದಿಯಲ್ಲಿ ಬಾಹ್ಯ ಸಕ್ರಿಯ ಕ್ಷಣವನ್ನು ಅನ್ವಯಿಸಬೇಕು.
ಫೀಡ್-ಬ್ಯಾಕ್ ಮೋಡ್ ಅನ್ನು ಎತ್ತುವ ಸ್ಥಾಪನೆಗಳಲ್ಲಿ ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಅವರೋಹಣದ ಸಮಯದಲ್ಲಿ, ಲೋಡ್ನ ಸಂಭಾವ್ಯ ಶಕ್ತಿಯ ಕಾರಣದಿಂದಾಗಿ ಪ್ರೊಪಲ್ಷನ್ ಸಿಸ್ಟಮ್, ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಮೀರಿದ ವೇಗವನ್ನು ಪಡೆಯಬಹುದು ಮತ್ತು ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣದ ಮೇಲೆ ನಿರ್ದಿಷ್ಟ ಬಿಂದು g ಗೆ ಅನುಗುಣವಾದ ಸಮತೋಲನ ಸ್ಥಿತಿಯಲ್ಲಿ ಇಳಿಯುವಿಕೆ ಸಂಭವಿಸುತ್ತದೆ. , ಅವರೋಹಣ ಲೋಡ್ನಿಂದ ರಚಿಸಲಾದ ಸ್ಥಿರ ಕ್ಷಣವನ್ನು ಎಂಜಿನ್ ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್ನಿಂದ ಸಮತೋಲನಗೊಳಿಸಿದಾಗ.
ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಸ್ಥಿರ ಟಾರ್ಕ್ನೊಂದಿಗೆ ಸಾಂಪ್ರದಾಯಿಕ ಡ್ರೈವ್ಗಳಲ್ಲಿ, ಪ್ರಶ್ನೆಯಲ್ಲಿರುವ ಮೋಡ್ ಅನ್ನು ವಿಶೇಷ ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ಗಳ ಮೂಲಕ ಮಾತ್ರ ಕಾರ್ಯಗತಗೊಳಿಸಲಾಗುತ್ತದೆ, ಇದು ಕಾಂತೀಯ ಕ್ಷೇತ್ರದ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ. ಫೀಡ್-ಬ್ಯಾಕ್ ಮೋಡ್ಗಾಗಿ ಇಂಡಕ್ಷನ್ ಯಂತ್ರದ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಅದೇ ಚಿತ್ರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ. 1.
ತೋರಿಸಿರುವಂತೆ, ಜನರೇಟರ್ ಮೋಡ್ನಲ್ಲಿ ಗರಿಷ್ಠ ಟಾರ್ಕ್ ಮೋಟಾರ್ ಮೋಡ್ಗಿಂತ ಸ್ವಲ್ಪ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ ಮತ್ತು ಸಂಪೂರ್ಣ ಮೌಲ್ಯದಲ್ಲಿ ನಿರ್ಣಾಯಕ ಸ್ಲಿಪ್ ಒಂದೇ ಆಗಿರುತ್ತದೆ.
ಅಸಮಕಾಲಿಕ ಜನರೇಟರ್ಗಳು ಬಹಳ ಕಿರಿದಾದ ವ್ಯಾಪ್ತಿಯನ್ನು ಹೊಂದಿವೆ, ಅವುಗಳೆಂದರೆ ಪವನ ವಿದ್ಯುತ್ ಸ್ಥಾವರಗಳು... ಗಾಳಿಯ ಬಲವು ಸ್ಥಿರವಾಗಿಲ್ಲ ಮತ್ತು ಅದರ ಪ್ರಕಾರ, ಸಾಧನದ ತಿರುಗುವಿಕೆಯ ವೇಗವು ಗಮನಾರ್ಹವಾಗಿ ಬದಲಾಗುತ್ತದೆ, ಈ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಅಸಮಕಾಲಿಕ ಜನರೇಟರ್ ಅನ್ನು ಆದ್ಯತೆ ನೀಡಲಾಗುತ್ತದೆ.
ಬ್ರೇಕಿಂಗ್ ಮೋಡ್ ಅನ್ನು ಹೆಚ್ಚು ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ - ವಿರೋಧ. ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಳು ಮತ್ತು ಡಿಸಿ ಮೋಟಾರ್ಗಳ ಈ ಮೋಡ್ಗೆ ಪರಿವರ್ತನೆಯು ಎರಡು ಸಂದರ್ಭಗಳಲ್ಲಿ ಸಾಧ್ಯವಿದೆ (ಚಿತ್ರ 1): ಸ್ಥಿರ ಟಾರ್ಕ್ (ವಿಭಾಗ ab) ನಲ್ಲಿ ಗಮನಾರ್ಹ ಹೆಚ್ಚಳದೊಂದಿಗೆ ಅಥವಾ ತಿರುಗುವಿಕೆಯ ವಿಭಿನ್ನ ದಿಕ್ಕಿಗೆ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ ಅನ್ನು ಬದಲಾಯಿಸುವಾಗ ( ವಿಭಾಗ ಸಿಡಿ).
ಎರಡೂ ಸಂದರ್ಭಗಳಲ್ಲಿ, ವಿದ್ಯುತ್ ಪ್ರವಾಹಗಳು ಆರಂಭಿಕ ಪ್ರವಾಹಗಳನ್ನು ಮೀರುವವರೆಗೆ 1 ಕ್ಕಿಂತ ಹೆಚ್ಚಿನ ಸ್ಲಿಪ್ನೊಂದಿಗೆ ಮೋಟಾರ್ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಆದ್ದರಿಂದ, ಅಳಿಲು-ಕೇಜ್ ಮೋಟರ್ಗಾಗಿ, ಡ್ರೈವ್ ಅನ್ನು ತ್ವರಿತವಾಗಿ ನಿಲ್ಲಿಸಲು ಮಾತ್ರ ಈ ಮೋಡ್ ಅನ್ನು ಬಳಸಬಹುದು.
ಶೂನ್ಯ ವೇಗವನ್ನು ತಲುಪಿದಾಗ, ಮೋಟಾರ್ ಅನ್ನು ಮುಖ್ಯದಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಳಿಸಬೇಕು, ಇಲ್ಲದಿದ್ದರೆ ಅದು ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ವೇಗವನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ.
ವಿರುದ್ಧ ಗಾಯದ ರೋಟರ್ ಮೋಟಾರ್ಗಳಿಂದ ಬ್ರೇಕ್ ಮಾಡುವಾಗ, ಪ್ರಸ್ತುತವನ್ನು ಮಿತಿಗೊಳಿಸಲು ಮತ್ತು ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್ ಅನ್ನು ಹೆಚ್ಚಿಸಲು ರೋಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ರಿಯೊಸ್ಟಾಟ್ ಪ್ರತಿರೋಧವನ್ನು ಪರಿಚಯಿಸಬೇಕು.
ಇದು ಕೂಡ ಸಾಧ್ಯ ಡೈನಾಮಿಕ್ ಬ್ರೇಕಿಂಗ್ ಮೋಡ್… ಆದಾಗ್ಯೂ, ಇದು ಕೆಲವು ತೊಂದರೆಗಳನ್ನು ಉಂಟುಮಾಡುತ್ತದೆ. ಮೋಟಾರು ಮುಖ್ಯದಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಂಡಾಗ, ಯಂತ್ರದ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವೂ ಕಣ್ಮರೆಯಾಗುತ್ತದೆ. ನೇರ ಪ್ರವಾಹದ ಮೂಲದಿಂದ ಇಂಡಕ್ಷನ್ ಯಂತ್ರವನ್ನು ಪ್ರಚೋದಿಸಲು ಸಾಧ್ಯವಿದೆ, ಇದು ಪರ್ಯಾಯ ವಿದ್ಯುತ್ ಜಾಲದಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಂಡ ಸ್ಟೇಟರ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ. ಮೂಲವು ನಾಮಮಾತ್ರಕ್ಕೆ ಹತ್ತಿರವಿರುವ ಸ್ಟೇಟರ್ ವಿಂಡಿಂಗ್ನಲ್ಲಿ ಪ್ರಸ್ತುತವನ್ನು ಒದಗಿಸಬೇಕು. ಈ ಪ್ರವಾಹವು ಸುರುಳಿಯ ವಿದ್ಯುತ್ ಪ್ರತಿರೋಧದಿಂದ ಮಾತ್ರ ಸೀಮಿತವಾಗಿರುವುದರಿಂದ, DC ಮೂಲ ವೋಲ್ಟೇಜ್ ಕಡಿಮೆಯಿರಬೇಕು (ಸಾಮಾನ್ಯವಾಗಿ 10 - 12 V).
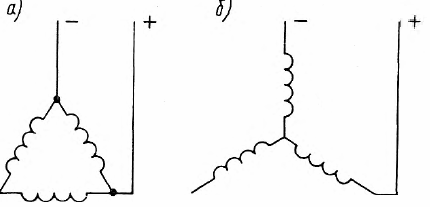
ಅಕ್ಕಿ. 2. ಡೆಲ್ಟಾ (ಎ) ಮತ್ತು ಸ್ಟಾರ್ (ಬಿ) ನಲ್ಲಿ ಸಂಪರ್ಕಿಸಿದಾಗ ಡೈನಾಮಿಕ್ ಬ್ರೇಕಿಂಗ್ ಮೋಡ್ನಲ್ಲಿ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಸ್ಟೇಟರ್ ಅನ್ನು ಡಿಸಿ ಮೂಲಕ್ಕೆ ಸಂಪರ್ಕಿಸುವುದು
ಡೈನಾಮಿಕ್ ಬ್ರೇಕಿಂಗ್ಗಾಗಿ ಸ್ವಯಂ-ಪ್ರಚೋದನೆಯನ್ನು ಸಹ ಬಳಸಲಾಗುತ್ತದೆ. ಕೆಪಾಸಿಟರ್ಗಳು ಮುಖ್ಯದಿಂದ ಸಂಪರ್ಕ ಕಡಿತಗೊಂಡ ಸ್ಟೇಟರ್ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿವೆ.
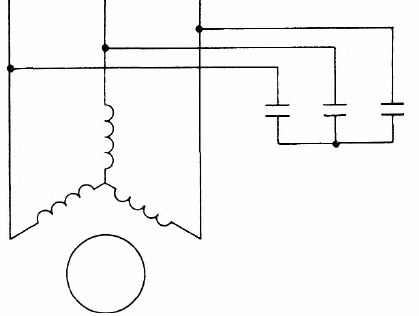
ಅಕ್ಕಿ. 3. ಸ್ವಯಂ-ಪ್ರಚೋದಿತ ಇಂಡಕ್ಷನ್ ಮೋಟರ್ನ ಡೈನಾಮಿಕ್ ಬ್ರೇಕಿಂಗ್ನ ಸ್ಕೀಮ್ಯಾಟಿಕ್
ರೋಟರ್ ತಿರುಗುವಂತೆ, ಸ್ಟೇಟರ್ ವಿಂಡ್ಗಳ ಮೂಲಕ ಮತ್ತು ಕೆಪಾಸಿಟರ್ಗಳ ಮೂಲಕ ಉಳಿದಿರುವ ಮ್ಯಾಗ್ನೆಟೈಸೇಶನ್ ಮತ್ತು ಪ್ರಸ್ತುತ ಹರಿವಿನಿಂದಾಗಿ ಸ್ಟೇಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಇಎಮ್ಎಫ್ ಅನ್ನು ರಚಿಸಲಾಗುತ್ತದೆ.ಸ್ಟೇಟರ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಒಂದು ನಿರ್ದಿಷ್ಟ ವೇಗವನ್ನು ತಲುಪಿದಾಗ, ಅನುರಣನ ಪರಿಸ್ಥಿತಿಗಳು ಸಂಭವಿಸುತ್ತವೆ: ಅನುಗಮನದ ಪ್ರತಿರೋಧಗಳ ಮೊತ್ತವು ಕೆಪ್ಯಾಸಿಟಿವ್ ಪ್ರತಿರೋಧಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ. ಯಂತ್ರದ ಸ್ವಯಂ-ಪ್ರಚೋದನೆಯ ತೀವ್ರವಾದ ಪ್ರಕ್ರಿಯೆಯು ಪ್ರಾರಂಭವಾಗುತ್ತದೆ, ಇದು ಇಎಮ್ಎಫ್ ಹೆಚ್ಚಳಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ. ಯಂತ್ರ E ಯ EMF ಮತ್ತು ಕೆಪಾಸಿಟರ್ಗಳಲ್ಲಿ ವೋಲ್ಟೇಜ್ ಡ್ರಾಪ್ ಸಮಾನವಾದಾಗ ಸ್ವಯಂ-ಪ್ರಚೋದನೆಯ ಮೋಡ್ ಕೊನೆಗೊಳ್ಳುತ್ತದೆ.
ಹೆಚ್ಚುತ್ತಿರುವ ಸಾಮರ್ಥ್ಯದೊಂದಿಗೆ ಗರಿಷ್ಠ ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್ ಕಡಿಮೆ ವೇಗಕ್ಕೆ ಬದಲಾಗುತ್ತದೆ. ಪರಿಗಣಿಸಲಾದ ಬ್ರೇಕಿಂಗ್ ಮೋಡ್ನ ಅನಾನುಕೂಲಗಳು ಒಂದು ನಿರ್ದಿಷ್ಟ ವೇಗದ ವಲಯದಲ್ಲಿ ಮಾತ್ರ ಬ್ರೇಕಿಂಗ್ ಕ್ರಿಯೆಯ ನೋಟ ಮತ್ತು ಕಡಿಮೆ ವೇಗದಲ್ಲಿ ಬ್ರೇಕಿಂಗ್ಗಾಗಿ ದೊಡ್ಡ ಕೆಪಾಸಿಟರ್ಗಳನ್ನು ಬಳಸಬೇಕಾಗುತ್ತದೆ.
ಪ್ಲಸ್ ಸೈಡ್ನಲ್ಲಿ, ವಿದ್ಯುತ್ ಶಕ್ತಿಯ ಯಾವುದೇ ಹೆಚ್ಚುವರಿ ಮೂಲ ಅಗತ್ಯವಿಲ್ಲ. ಸರಬರಾಜು ನೆಟ್ವರ್ಕ್ನ ವಿದ್ಯುತ್ ಅಂಶವನ್ನು ಸುಧಾರಿಸಲು ಕೆಪಾಸಿಟರ್ ಬ್ಯಾಂಕ್ ಮೋಟಾರ್ಗೆ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಅನುಸ್ಥಾಪನೆಗಳಲ್ಲಿ ಈ ಮೋಡ್ ಅನ್ನು ಯಾವಾಗಲೂ ಅಳವಡಿಸಲಾಗಿದೆ.
ಈ ವಿಷಯದ ಬಗ್ಗೆಯೂ ನೋಡಿ: ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳಿಗಾಗಿ ಬ್ರೇಕ್ ಸರ್ಕ್ಯೂಟ್ಗಳು